冲压线装配仿真中虚拟技术的研究
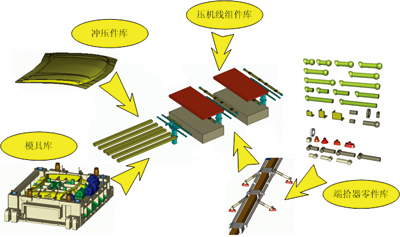
图1 虚拟冲压线三维模型类库的组成
应用虚拟装配技术建立汽车车身冲压线三维模型,并通过在虚拟装配环境下进行仿真的手段实现对冲压线装配路线的合理规划,可有效改善冲压线的装配工艺,同时可缩短冲压线组装周期,提高冲压线组装质量,降低冲压线组装成本。
虚拟装配是基于计算机生成的虚拟环境,对实体模型进行模拟装配的过程,并对装配过程和装配结果进行分析和验证。由于汽车车身冲压线组成部件不仅体积庞大、数目繁多,并且相互之间的运动联系也非常复杂,导致各冲压设备的装配序列和彼此之间的装配尺寸难以确定。如果按照传统的人工试凑装配方法,不但费时费力,延长冲压线的组装周期,直接影响到冲压生产线按期投入生产,有时甚至由于部件相互之间存在干涉导致无法完成组装成功。
针对上述问题,考虑企业的实际情况,本文应用虚拟装配技术来解决车身冲压线组装的难题。在建立汽车车身冲压线三维模型类库的基础上,构建虚拟环境以完成冲压线各零部件的装配过程,并运用仿真手段对装配结果进行验证。因此,操作人员通过与装配过程进行实时信息反馈和交互,可以直观地看到自己的组装结果,并且在此基础上进行各部件间的干涉检验及布局调整,从而真正利用虚拟现实的手段实现冲压线装配路线的合理规划。
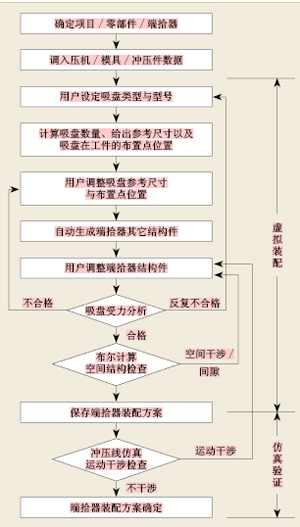
图2 端拾器自动装配流程图
冲压线实体建模
冲压线实体建模的核心问题是解决如何在虚拟环境中表达和存储冲压线各零部件的数据信息,使之能够全面支持装配工艺规划、装配分析与评价以及为装配仿真提供所需的信息数据。因此,装配模型是进行虚拟装配的信息基础和前提条件。
1、冲压线基本建模工作
建模工作产生的所有的计算机模型格式主要采用CATIA V5文件,也可利用其他CAD系统(如Pro/E、AutoCAD、UG)等来建立,利用中性文件格式进行转换。虚拟冲压线基本建模工作见表1。
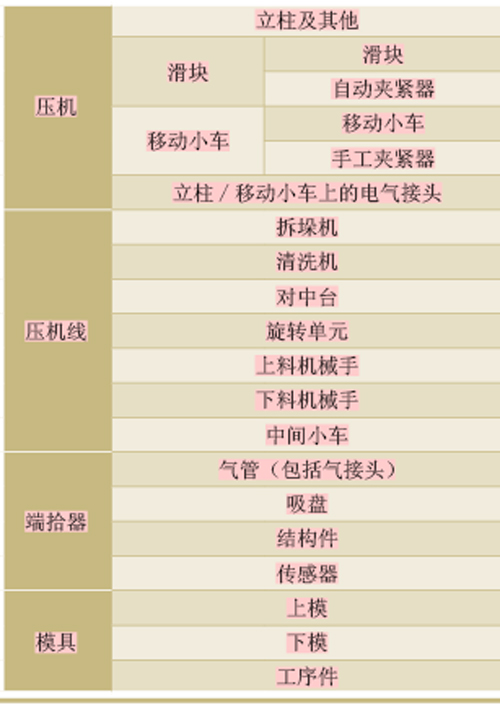
汽车车身虚拟冲压线主要建模工作
2、建立虚拟冲压线模型类库
基于表1的冲压线基本工作,建立压机线组件库、冲压件库、模具库、端拾器零件库等模型类库,组成结构如图1所示。每一模型类库对应计算机一文件夹下存储的物理地址。
(1)压机线组件库
压机线组件库是整个虚拟冲压线的主体,包括压机、拆垛机、清洗机、对中台、旋转单元、上下料机械手、中间小车等。由于压机结构与空间布局相对固定,尺寸、外形、相对位置由压机厂商提供,因此在后续的装配过程中相对稳定。
(2)冲压件库
冲压件是压机的工作对象,从车身设计部门提供CAD图纸,一般冲压件包括车身外覆盖件和大型内衬件。
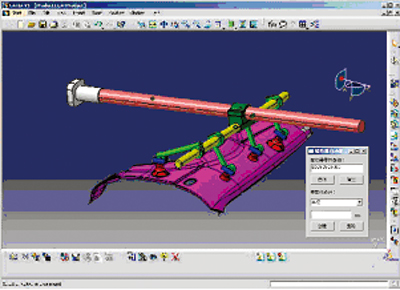
图3 端拾器自动装配过程效果图
(3)模具库
模具由冲压件零件决定,模具CAD图由模具设计部门提供,根据冲压件的不同选择相应的模具数据文件。
(4)端拾器零件库
吸盘及结构件等构成真空吸盘式端拾器部件。冲压生产线其相邻两个压力机的输送单元主要有以下机构组成:
□ 一个取料机械手,带有中置并按工件形状排部的真空吸盘式端拾器,负责将工件从上一台压力机取出放置在穿梭小车上。
□ 一个在压力机之间固定轨道上移动的穿梭小车,负责将工件由取料机械手的放料位置移送到上料机械手的取料位置。
□ 一个上料机械手,带有和取料机械手相同的端拾器,负责将工件由穿梭小车拾起并送入下一台压力机工位。
由此可见,端拾器是冲压线拾取和放置冲压件的重要执行机构。
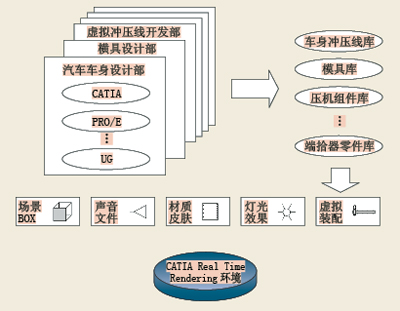
图4 冲压线虚拟装配环境的构建
冲压线的虚拟装配
在建立冲压线各模型类库的基础上,通过调用各参数文件并进行虚拟装配,调整每个零部件模型的三维空间坐标和结构布局,并经布尔计算确定各零件模型设计是否有缺陷(是否存在空间干涉或者间隙)。
压机结构以及压机线的空间布局相对固定,模具是嵌入在压机之上,冲压件是直接从冲压件库中调用,按照CATIA提供的点线约束、点面约束、面面约束以及同轴约束等条件一一进行,直到装配完成。因此,这部分的装配工作简单,并利用CATIA的宏(macro)命令将装配过程录制下来,实现一次装配重复利用,即开始新的装配任务时,通过宏命令回放直接完成该部分的装配,必要时适当修改回放过程中的某些装配细节。
端拾器的装配工作则非常复杂,由于冲压件根据生产计划的要求而经常变更,不同的冲压件需要对应不同的端拾器抓取,因此,需要对CATIA进行二次开发,从而智能地辅助生产一线的技术人员针对不同冲压件,快速地完成其相对应的端拾器部件的装配。
本文采用CATIA的VBA二次开发技术,实现端拾器的自动装配,其流程图如图2所示。
1、操作人员从冲压件库里调出冲压件数据文件,并设定吸盘类型与型号。
2、软件根据冲压件几何尺寸,给出吸盘数量、参考尺寸以及吸盘在工件的布置点位置。操作人员基于软件给出的吸盘的参考尺寸与布置点进行调整。
3、软件生成端拾器的其他结构件,自动装配成端拾器部件,并计算吸盘受力情况。吸盘受力分析不通过,重复上述步骤,人工调整吸盘的参考尺寸与布置点情况。
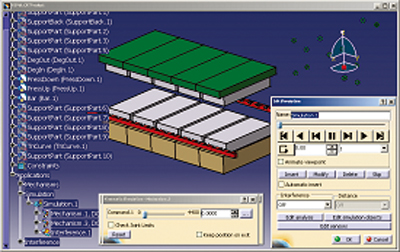
图5 装配后的冲压线仿真运行过程
4、上/下料机械手是连接端拾器和压机的机构。生成的端拾器与上/下料机械手、压机组合装配,并进行布尔计算检查端拾器是否与冲压线其他零部件存在空间干涉/间隙的情况,从而进一步调整端拾器结构件的尺寸及空间布局。
5、操作人员保存软件给出的、并经过调整的端拾器装配方案,为进一步的冲压线仿真做准备。
端拾器装配方案还需要经过后续的冲压线整体仿真验证,即端拾器在工作当中是否会与冲压线其他零部件发生运动干涉。如果后续的冲压线仿真运行过程中、端拾器工作中没有发生干涉,则端拾器装配方案最终得到确定。
端拾器自动装配过程效果图如图3所示。图中的对话框为操作人员输入和调整端拾器吸盘型号、结构件尺寸参数的控件。
虚拟冲压线的仿真运行
1、冲压线虚拟装配环境构建
虚拟环境是在计算机上构建的模拟三维空间,它是整个虚拟装配系统发挥作用的基础。文中的虚拟装配环境采用CATIA的Real Time Rendering(实时建模)环境模块,其内容如图4所示。
冲压线模型类库是构成虚拟环境的主要内容,是冲压线实物数字化的过程。为了让虚拟环境系统更贴近真实,必须对数字模型作光线、色彩、纹理声音等方面的处理,使得虚拟装配仿真达到视觉上的逼真。
对汽车车身冲压线这类复杂多造型实体的渲染过程,可以通过为造型构造LOD的方法来减少实时绘制的开销,从而加快浏览速度。LOD是细节层次模型(Level of Detail)的英文简称,其主要思想是对于同一实体,根据其在虚拟场景的距离、视觉特性等规则,构造一组可显示不同多面体数量的三维模型。在模型驱动时根据所制定的规则,选择相应的显示层次,从而达到实时简化模型,而又不影响视觉效果的目的。
2、装配仿真的驱动
冲压线运动要素主要包括压机内/外滑块的运动;上/下气垫的运动;模具夹紧器的运动;移动工作台的运动;拆垛机、清洗机、对中台的运动等。采用CATIA的Digital Mockup(数字化模型)功能中的Kinematics Simulator(运动仿真)模块,对冲压线各运动要素进行运动约束处理,包括添加球面高副、柱面高副、球面低副、球销副、圆柱套筒副、转动副、移动副等运动约束。
需要特别说明的一点是,由于整条冲压线上的运动机构繁多,必须将整条冲压线运动系统分解成许多子系统,每个子系统都必须有一个零件固定于地表面,其他的零件与此零件构成各种运动约束,使得该子系统成为空间运动构件,其自由度应当大于零且与原动件数相等,则可通过CATIA的Mechanism Analysis(机械模块)检查。当所有子系统都通过检查,最后组合进行冲压线装配仿真。
要让虚拟冲压线运动起来,还需要给可运动机构赋予与实际工况相一致的运动规律。这可通过Kinematics模块为冲压线运动机构添加command操作来驱动,内容包括各运动自由度运动的时间,运动的位置变化大小等。对于更为复杂的运动规律,可通过添加Laws和Speed-Accelerations选项做进一步的详细描述,使其运动规律与实际工况更加贴近。
CATIA Real Time Rendering环境中的Play a Simulation功能界面可以将各零件在程序的驱动下的整个装配过程以可视化形式显示出来。图6为装配后的冲压线简化模型仿真运行过程的情景。
3、虚拟装配结果的验证
虚拟装配过程是在计算机上实现的,虚拟现实作为从现实过程到计算机上的一种映射,它直观地模拟了现实过程。通过虚拟现实达到对现实过程的前瞻性预测。
建立虚拟冲压线的主要目的就是要在实际冲压线装配之前,对装配方案进行可行性分析。因此,虚拟装配结果的验证,即冲压线各组成单元之间的运动干涉检查,是虚拟冲压线仿真运行的主体内容。
虚拟冲压线各组成零部件模型按设定的运动规律的驱动下仿真运行,运行过程中如果冲压线各运动单元之间发生干涉,软件会发出警告并以醒目色把干涉情况表示出来。
如果仿真运行中各组成零部件之间没有发生运动干涉,则虚拟冲压线装配结果得到验证,输出冲压线整体装配方案,等待下一次冲压线装配任务的到达。
结束语
本文应用虚拟装配技术,在建立汽车车身冲压线各组成模型类库的基础上,通过对虚拟冲压线装配后的运行过程进行仿真验证,替代了原有的实物模型预装配。冲压线组装人员通过虚拟装配的手段实现冲压线装配路线的合理规划,可有效改善冲压线的装配工艺,对于缩短冲压线组装周期、提高冲压线组装质量、降低冲压线组装成本有重要的理论与现实意义。












![]()
2001-2009 Vogel Industry Media版权所有 京ICP备09051372号 京公网安备110102001177号


跟帖
查看更多跟帖 已显示全部跟帖