伺服控制系统在自动静电喷涂机上的应用

图1 控制系统网络
随着汽车工业的发展,先进设备已在国内得到广泛应用。本文介绍EcoRC2伺服控制系统在自动静电喷涂机的应用,以及伺服控制系统故障原因分析和故障排除方法。
自动静电喷涂机
自动静电喷涂机是随着汽车工业的发展而出现的高新技术设备,它是根据汽车,特别是轿车大批量生产的特点,把工业机器人技术、硬仿形自动喷涂机技术综合、简化而成的新型自动化涂装设备。
伺服控制系统
自动静电喷涂机的控制系统网络如图1所示,EcoScreen用户界面提供功能可控制整个系统及其各个部件,并且具有显示状态、故障监控、错误信息、故障诊断和参数设置等功能,它通过工业以太网通信系统连接到中间层上的EcoRC2和S7-400 PLC。中间应用程序层主要用于过程和安全控制的控制器,这些控制器是不带键盘和屏幕的专用计算机,它们进行安全控制(PILZ-PLC)、过程控制(西门子S7-400 PLC作为总线主设备)以及子过程控制(EcoRC2),通过Profibus总线相互连接,并通过Profibus现场总线系统与底部部件连接,以及通过“SERCOS”通信系统与Indramat驱动装置进行连接。底部部件用于控制各轴的运动轴线、计量泵驱动装置、电子气动部件和高电压部件等。
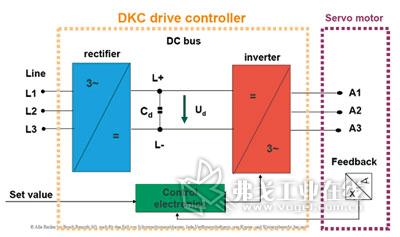
图2 伺服驱动控制
自动静电喷涂机伺服控制系统采用DURR与KEBA公司合作开发设计的EcoRC2控制器,主要用来控制自动喷涂机各个轴的运动,通过“SERCOS”(串行实时通信协议)光纤通信与Indramat伺服驱动器进行连接,SERCOS控制器发送相应的指令至伺服驱动器,Indramat伺服驱动器通过控制伺服电动机来实现各轴的运动(见图2)。
伺服控制系统的优点主要是:
1.控制精度高 实现了位置、速度和力矩的闭环控制,可以对电动机实现精确的力矩控制,其速度和位置控制可以直接通过数字控制来实现;
2.稳定性 反应速度和稳定性明显;
3.及时性 电动机加减速的动态相应时间短,一般在几十毫秒之内;
4.发热和噪声明显降低。
EcoRC2伺服控制器主要包括机架CR092、电源模块PS244、CPU模块CU313、通信模块SC102、数字输入模块DI325和数字输出模块DO321,如图3所示。PS244电源模块产生用于插入式模块的内部操作电压和用于传感器的电源电压;CPU模块CU313是用于编程和控制所有连接硬件部件的中央处理单元;通信模块SC102通过扩展总线接头把插入式接口与CPU模块相连;数字输入模块DI325是用于记录外部电压信号,这些信号容许被检测到的范围是18~30VDC;数字输出模块DO321是用于控制各种使用24VDC的外部设备。

图3 伺服控制器的组成
EcoRC2伺服控制器的程序主要存储的FLASH卡中,它可以通过INTOUCH操作界面对程序进行下载和备份。具体方法如下:选择ECOSCREEN界面上的“维护和保养”窗口,再选择“Date Save”窗口,然后点击“EcoRC2 Flash Card”标志(见图4);如果想要把Flash卡内的程序备份到电脑,就选择图标,系统会出现一个默认的路径(当然也可以另外设定路径),然后选择“START”后点击“OK”就可以了;同样想下载程序到Flash卡内,就选择图标,然后选择你所要下载的程序路径,选择“START”后点击“OK”就可以了。在系统每天自动备份的“DB”参数中,也包含了Flash卡内的程序。它的路径为:D盘/BACKUP/NEW/db_(站名)/RC Flashcard,当程序丢失后,就可以从备份中寻找到并下载(见图5);当网络传输出现问题时,可以将Flash卡插入笔记本电脑,直接将该站的程序文件拷贝到Flash卡内。
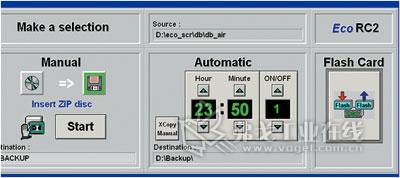
图4 FLASH程序下载选择
日常应用维护
自动静电喷涂机在运行期间必须定期检查各轴的参考位置,而且在电动机皮带、减速机和伺服电动机等进行更换后,必须对其参考位置进行重新下载。具体方法如下:
1.将机器切换到“手动模式”,打开该轴的驱动,在ECOSCREEN界面上点击“Positioning”,选择“Manual/Jodmode”模式,将机器点动到参考位置标记处(或立柜内箭头标记处在标尺的红点处);
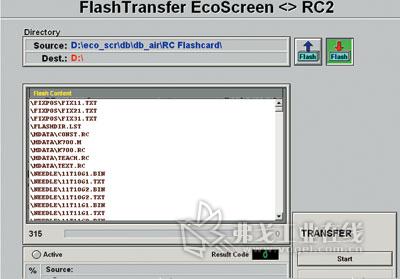
图5 FLASH 程序上传、下载路径
2.将机器点动到参考位置的标记后,关闭机器运动;
3.在ECOSCREEN上点击“保养和维护”窗口,再点击“Machin Data”窗口,对参考位置进行下载(见图6);
4.在运动被禁止状态下,用人工方法将机器机臂拉到参考位置标记处,进行参考位置的下载。
5.试运行方法:将机器切换到“手动模式”状态下运行,运动机器的6个固定位置,如果位置正常,自动静电喷涂机即可正常运行。
自动静电喷涂机伺服驱动器主要采用的是Rexroth公司生产的Indramat伺服驱动器,它的工作状态可以由EPROM模块(见图7)H1显示的相应代码来判断。
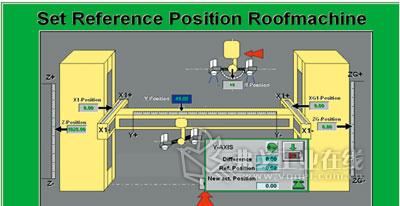
图6 参考位置的下载
常见故障分析
下面主要对自动静电喷涂机的一些常见伺服控制器的故障代码含义进行分析,并阐述故障的原因及排除方法。
1.ESTA PR站SM22 A轴出现F228故障:偏差过大
(1)故障可能产生的原因:伺服驱动器加速度参数S-0-0092设置较小;参数S-0-0159,监控窗口设置不正确;A轴运动轴受阻;伺服驱动器参数中设定了不正确的参数值。
(2)故障排除:检查伺服驱动器加速度参数S-0-0092,将其设定为应用的最大允许值;正确设定参数S-0-0159 的数值;对SM22雾化器A轴机械系统检查,消除坐标轴阻塞情况;对EPROM模块参数进行下载,如图9所示,重启RC2控制器,将自动喷涂机打到自动状态,SM22 A轴F228故障消除。
2.ESTA BC站SM11 Y轴报F870故障:24V直流电源故障
(1)故障可能产生的原因 24V直流电源故障;24V控制电压电缆有故障;紧急停机电路短路。
(2)故障排除 检查24V的电源和电压部分,必要时对伺服控制器进行更换;检查电缆和电缆的连接;检查急停电路是否短路。
3.ESTA BC站SM22 Z轴伺服控制器报F822运动故障
(1)故障产生的原因分析 伺服电动机上的反馈线接头松动;Indramat伺服驱动器反馈接头松动;伺服电动机的编码器损坏。
(2)故障排除 对伺服驱动器反馈线接头进行检查及焊接处理;对伺服电动机内部的反馈电缆端子检查和重新插入;对电柜内反馈电缆端子进行检查;更换伺服电动机,如故障仍然存在,必须对反馈电缆进行更换。
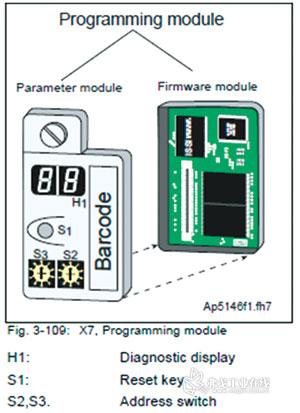
图7 EPROM模块
4.Indramat伺服驱动器报E410故障
(1)故障产生的原因分析 伺服驱动器EPROM地址被更改;RC初始化时,在通信阶段1中未能扫描到伺服驱动器。
(2)故障排除 打开DRIVETOP软件,对该伺服驱动扫描过程中发现总线地址发生变化,检查伺服驱动器 EPROM地址发现被更改,重新设定正确的总线地址,并对该轴EPROM参数进行下载后设备正常;该轴在INTOUCH操作界面禁止测量系统内被禁止,而操作界面该轴未显示被禁止,重新打开该轴后,E410故障消失。
5.Indramat伺服驱动器报F276故障
(1)故障产生的原因分析 伺服驱动器第一次使用,以前储存的位置无效;当伺服电动机编码器拆下后,马达被转动超过参数允许的范围;初始位置不正确。
(2)故障排除 复位S1按钮,清除故障并设置绝对位置;检查该轴的参考位置并重新下载;伺服电动机产生了机械事故,更换并下载参考位置。
6.Indramat伺服驱动器报F860过流故障
(1)故障产生的原因分析 伺服电动机或者伺服电动机电缆内出现短路;伺服电动机控制装置的电源有故障;电流调节装置的参数设定错误。
(2)故障排除 检查伺服电动机电缆是否短路;更换Indramat伺服驱动控制器;检查电流参数是否正确。
7.Indramat伺服驱动器报F878故障
(1)故障产生的原因分析 伺服电动机电缆连接错误;伺服电动机伺服驱动控制器故障;伺服电动机反馈失效;速度环参数错误和错误的位移补偿值。
(2)故障排除 检查伺服电动机电缆连接;更换Indramat伺服驱动控制器;检查反馈电缆及更换伺服电动机;检查该轴参考位置,并重新下载参考位置。
8.Indramat伺服驱动器报F260电流极限故障
(1)故障产生的原因分析 伺服电动机电缆没有正确连接;伺服电动机抱闸没有释放;运动轴机械卡死;伺服电动机损坏。
(2)故障排除 检查伺服电动机电缆;检查伺服电动机抱闸和运动轴机械部分是否卡死;更换伺服电动机;更换Indramat伺服驱动器。
9.Indramat伺服驱动器报F409总线故障
(1)故障产生的原因分析 网卡或通信模块故障;总线电缆出现问题;主站没有发送指令和主站的信息交换被中断。
(2)故障排除 对网卡或通信模块进行检查和更换;对总线电缆进行检查;检查主站。
10.Indramat伺服驱动器报E221电动机温度监控故障
(1)故障产生的原因分析 伺服电动机损坏,温度较高;伺服电动机温度传感器损坏或没有连接;伺服电动机和伺服驱动器之间电缆损坏;伺服驱动器损坏。
(2)故障排除 更换伺服电动机;检查传感器并进行连接;更换伺服电动机和伺服驱动器之间的电缆;更换Indramat伺服驱动器。
结语
随着汽车工业的发展,先进的汽车涂装设备在我国已快速得以应用,目前,伺服控制系统在喷涂设备和喷涂机器人系统得到了广泛的应用,不仅可以提高涂装生产线设备的先进性、加工效率及改善产品的加工质量,同时对于我国的制造业发展,也是非常有利的。












![]()
2001-2009 Vogel Industry Media版权所有 京ICP备09051372号 京公网安备110102001177号


跟帖
查看更多跟帖 已显示全部跟帖