基于PROFIBUS的机器人柔性涂装工作站
本文介绍了一种基于PROFIBUS总线的机器人柔性涂装工作站的设计方法,运用多智能模块系统理论思想,从系统架构和系统控制两个方面分析了其系统原理,并着重研究了机器人涂装系统集成技术及其工程实现。
实现涂装过程自动化,具有巨大的社会与经济效益,如今采用机器人自动化作业线或工作站(见图1)已成为大势所趋。机器人操纵自动喷枪可以精确地控制双组份胶的流量,进行各种复杂工件喷涂。本文主要介绍机器人柔性涂装系统的设计思想和实现方法。

图1 涂装工作站
机器人喷涂系统构架
机器人喷涂系统主要由防爆喷涂机器人系统、工作站控制系统、喷涂软件、旋转喷涂工作台、供胶配比计量系统(见图2)、水帘式喷房(见图3)、过滤送风系统、自动喷枪、流量调节器及一些喷胶辅助设备等构成,其系统布局如图4所示。作业中,当机器人在B位喷涂工位生产时,操作人员在A位上件工位放置一块待喷涂工件,当人退至安全区域后,按动开关,当喷涂作业完成时气动快速封闭门打开,旋转喷涂工作台旋转,旋转完毕,气动快速封闭门关闭。通过旋转台实现工件工位交换,将喷涂完的工件旋转到A位,人工下件;将人工放置的工件旋转至B位进行喷涂。如此重复作业。
1.机器人系统
本系统选用1台史陶比尔防爆喷涂机器人,整套机器人系统由机器人本体与机器人控制器组成。机器人最大动作半径为2010mm,重复定位精度为±0.05mm,最大负载为28kg。
使用PaintiXen喷涂软件,可以简化操作过程,无论是新建产品或是调整产品顺序,都可以直接在操作盒界面进行调整,无需修改程序。

图2 供胶配比计量系统及机器人
2.工作站控制系统
工作站中的主要控制装置包括PLC和监控装置。系统控制模式分为手动模式和自动模式,手动模式用于系统调试和维护等工作;自动模式是在正式生产且所有设备均正常状态时的工作模式。
(1)PLC负责整个系统的集中调度,通过PROFIBUS总线和I/O接口获取各单元的状态信息,将任务划分为各个子任务,分发并协调各单元的工作。
(2)本系统采用触摸屏简化了系统的人机接口,人机界面友好,更改设置方便,操作简单,增加了安全性。
(3)PLC编程设置不同型号工件的轨迹调用程序,人工启动触摸屏相应工件的按钮,机器人自动调用相应的喷涂程序。
3.旋转喷涂工作台
机器人喷胶系统采用两工位旋转台,驱动组件由变频驱动电动机、减速机和齿轮构成。它的使用有三大优点:可以将被喷涂工件安装固定在工作台上,重复性好,有利于机器人喷涂;使用两个工位,即上件工位和喷涂工位,大大缩短了系统节拍的总时间;上件工位与喷涂工位分开布置,中间由气动快速升降门隔离,这样喷涂空间封闭,改善系统的环保性能,减少对人体的伤害。

图3 水帘喷房
4.供胶配比计量系统
在本系统中,供胶配比计量系统主体包括:气动泵、双组份配比计量装置、涂料调压阀、过滤器、油漆罐、换色阀、自动清洗及换色功能等装置。
供胶模组和双组份配比计量装置以稳定的压力、精确的配比和稳定的供胶流量,将胶液输送到自动喷枪,通过喷涂流量和机器人运行速度的最佳配合,保证所喷涂胶液雾化和扇幅的稳定性和一致性。机器人通过运动速度控制喷胶输出量,保证喷胶的稳定和均匀性。供胶系统在材料罐内加热,温度可通过模温机进行精确控制。
换色时通过自动清洗泵来清洗系统,然后通过换色阀更换至想要喷涂颜色。由于是前端混合,所以清洗比传统的人工清洗简单,并且节省材料。
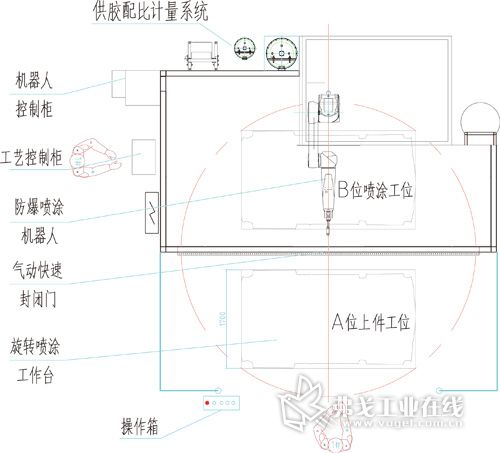
图4 系统布局
5.水帘式喷房
水帘式喷房将喷漆过程中的漆雾限制在一定区域内进行过滤处理。喷漆室制作的工作环境,能满足涂装作业时的空气环境要求,保护操作者的身体、治理涂装作业产生的废物排放并保护环境免受污染等。水帘式喷房是控制产品涂装质量的重要设备。改良的水帘式喷房为工件喷涂提供洁净的工作环境并充分收集漆雾。
漆雾回收可分成两个部分:一是喷涂工件时,漆雾与水帘碰撞混合,水帘会溶入部分漆雾落入水槽;二是未溶入水帘的漆雾经水帘板底部缝隙进入水洗室,与雾化喷嘴喷出的水雾充分混合,汽水分离沉降后流入水槽。改良的漆渣处理装置操作更为简便,根据工厂污水处理的能力,可改为干式设计。
6.辅助喷胶设备
机器人喷胶系统安装有浓度检测装置(见图5),防止在工作过程中喷胶房内浓度过大导致机器人失效,甚至引发火灾,当房内浓度大于一定数值时,检测装置报警,机器人停止工作。
喷胶房正面安装快速升降门,取件、放件时快速升降门升起,在喷胶过程中快速升降门关闭,防止胶雾扩散污染环境。

图5 浓度检测装置
系统集成与控制
机器人喷胶系统属于复杂的多智能体系统,它在构建时建立多个智能体,在多个智能体资源共享和各个智能体自主性的基础上,找到并协调各个智能体的关系,共同完成整套系统的作业任务。防爆喷涂机器人必须联络其他各种设备和装置的有关信息,通过程序的处理与协调,才能实现自动运转。因此,防爆喷涂机器人除具有基本的示教再现功能外,与各智能体的联系成为应用的关键问题。喷胶系统功能如图6所示。

图6 喷胶系统功能
1.系统功能模块介绍
(1)机器人作业模块
机器人动作控制和机器人作业信号处理是机器人系统的主要任务,通过与主控PLC之间通信,实现系统的动作控制。
运行轨迹可采用示教编程方式,该方法适用于对简单工件表面喷涂时,在生产现场进行想要实现的任意曲线轨迹编程。
机器人通过工业现场总线与其他设备通信实现协调作业。防爆喷涂机器人和主控PLC控制装置进行通信。同时,机器人要与周边设备也进行必要的信息交换,用以协调安全互锁、确保正常作业等。机器人对系统状态信号进行动态实时监控和响应,并具有程序中断、断点数据自动记录和从断点恢复执行的功能。
(2)旋转喷涂工作台模块
采用PLC上位控制模块控制方式。旋转喷涂工作台有减速及停位传感器,当传感器检测到信号后,由PLC处理传感器信号,同时PLC发出信号,控制旋转喷涂工作台的相应减速、停位动作。系统具有较高的柔性。
(3)水帘式喷房模块
系统PLC控制水帘喷房模块。快速封闭门在得到指令后,打开或关闭。当PLC收到旋转喷涂工作台的到位信号后,给快速封闭门气缸电磁阀发出关门动作信号;当PLC收到喷涂工作完成信号后,给快速封闭门气缸电磁阀发出开门动作信号。
当PLC收到喷房内浓度检测装置报警时,会发出让机器人停止动作的信号,同时发出系统报警信号,人工查看故障原因,系统自动保留故障历史记录,直到不能检测到浓度报警为止,系统恢复正常。
(4)供胶配比计量系统模块
该模块接到机器人命令后开始供料和喷涂,指令传输通过PLC主控的PROFIBUS总线控制实现。该模块具有供胶流量计,能够通过自身的控制模块进行读取及设置,当检测到实际出料比例超出设定范围时,系统报警;该系统还具有加热功能,通过温控系统给材料罐水夹套内分别通冷、热水来实现温度控制。
(5)状态监控模块
状态监控模块是整个系统的窗口,系统依据该模块的各传感器信息判断自身状态和外部环境,制定相应的控制策略。状态监控模块的信息按照设置的特定信号发送给机器人,由机器人制定相应控制策略;其他信息将发给系统控制器(喷房内浓度检测传感器、减速到位传感器等),由系统主控制器分析计算制定相应的控制策略。
通过状态监控,可以使系统在更安全、可靠,如喷房内浓度增高到限定值时,可以及时监测处理,避免出现安全事故。
(6)本地操作模块
本地操作模块是控制系统的人机界面,包括系统操作面板、触摸屏、供胶配比设备操作盒及机器人示教盒。在操作面板上可实现系统运行方式切换、机器人作业程序号选择、转台复位、故障复位、急停和系统同状态显示等功能。采用触摸屏显示喷涂系统的各部分的工作状态和一些手动按钮及输入,还可以实时实现对系统的动作和报警信息进行记录。同时由于触摸屏程序可随时修改,使系统更趋柔性化。供胶配比设备操作盒可以设定不同颜色的配比比例和清洗时间等信息,实现本模块的开、关及清洗等动作。机器人示教盒完成机器人的示教编程和机器人工作状态参数的设置、显示。
(7)网络和接口模块
面向本地作业层次,模块提供PLC和机器人之间的现场总线和Ethernet通信网络;面向上级管理层,模块提供高层网络接口,实现工厂自动化管理。按照不同的管理级别设定密码,可以设定密码级别,分别为操作、维护和管理。
2.系统故障中断
运行中,如某个模块出现故障导致系统停机,可以人工检查并清除故障后再恢复系统运行。系统故障主要包括:系统控制报警、转台未到位报警、供胶配比装置报警、各电动机过流故障报警、机器人故障报警和安全系统报警等。
结语
该机器人自动喷胶工作站在设计过程中采用了模块化设计方法,节省了大量设计、加工制造的时间,同时也使系统更可靠。在设计过程中充分考虑到系统的柔性化,使工件类型改变时,只要修改相应的系统控制程序与机器人程序就可以适应产品的变化。该系统以工位专机的形式存在,并可根据用户的要求,延展并入生产线。随着我国汽车工业的迅速发展,对这种类型的工作站的需求将不断增大。












![]()
2001-2009 Vogel Industry Media版权所有 京ICP备09051372号 京公网安备110102001177号


跟帖
查看更多跟帖 已显示全部跟帖