机器视觉技术引导拧紧轴出错现象
机器视觉技术是指利用机器代替人眼进行识别及测量,通过机器视觉产品将被摄取目标转换成图像信号,传送给专用的图像处理系统,将像素分布和亮度、颜色等信息转变为数字信号,图像系统通过对这些信号进行各种运算来抽取目标的特征,进而根据判别的结果来控制现场的设备动作,从而达到对产品的测量、检测、定位及识别等目的。
机器视觉系统主要由光源、可视区域、图像获取装置、视觉评估工具及通信系统组成,基于机器视觉系统进行的产品生产过程具有以下优点:可实时检测;快速、非主观且可靠检查;可实时、直接输出结果。但由于相机成像受产品材料及环境因素影响较大,当相机所取得图像的关键特征及其他相关参数不符合视觉评估工具要求时,就有可能照成视觉评估工具评估出错甚至于无法进行评估,最终造成整个系统无法正常工作。解决机器视觉技术因成像原因而造成的工作不正常问题是使该技术得到更广泛应用的要素之一。
本文简述了机器视觉技术在某汽车发动机飞轮离合器连接螺栓拧紧过程中的应用,针对应用过程中出现的两种拧紧轴定位错误问题进行了原因分析,并提出了解决方法。
飞轮离合器连接螺栓拧紧过程
1.过程要求
某发动机飞轮离合器连接螺栓(以下简称“连接螺栓”)拧紧工位需要拧紧6颗连接螺栓,这些连接螺栓圆形均布,采用3根拧紧轴,分两步进行自动拧紧。3根拧紧轴集成于一个模块,使用机器视觉技术对拧紧轴模块进行引导定位,具体工作流程为:发动机到达拧紧工位——照相机对离合器表面进行拍照——拧紧轴模块自动旋转进行定位——拧紧轴模块进行第一次拧紧——拧紧轴模块旋转60°进行第二次拧紧——拧紧轴模块回到原点。
2.视觉技术定位原理
视觉系统引导拧紧轴定位的原理是先在图像评估工具内部程序中根据需要拧紧的螺栓设置Patterns (即参考基准),如图1中红色阴影部分为程序的一个Patterns。该基准的形状与连接螺栓表面形状类似,照相机取像后,该基准会自动寻找并移动到图像中与之形状最相似处进行对正重合,系统就根据该基准的移动角度输入给拧紧轴,进而实现拧紧轴找正连接螺栓位置。连接螺栓为圆型均布,同时3根拧紧轴也为圆型均布,在对同类型发动机进行连接螺栓拧紧时,由于所有拧紧轴处于同一分度圆上,所以只需要对一颗连接螺栓进行定位后,其他拧紧轴即可完成定位。视觉系统中的照相机对离合器总成表面进行局部取像,由于照相机位置与离合器圆心位置相对固定,照相机所取的图像中始终至少有一颗连接螺栓的图像,视觉系统通过对该连接螺栓图像进行处理后将信号输入拧紧轴控制模块完成拧紧轴定位。

图1 红色阴影部分为程序的一个Patterns
拧紧轴定位出错现象
1.连接螺栓与连接销钉混淆
如图2所示,该离合器总成中的连接销钉所处分布圆与连接螺栓分布圆直径相近,其位置处于连接螺栓旁,照相机取像后,连接销钉与连接螺栓位于在同一图像中,由于离合器总成上连接螺栓与连接销钉色差小,连接螺栓正好处于某些曝光强度大的区域时,连接销钉及其附近部分所成图像与连接螺栓所成图像相似,视觉系统对图像进行评估时,Patterns自动找正连接销钉而非连接螺栓,从而导致拧紧轴定位时对正连接销钉而非连接螺栓,最终导致该次拧紧无法完成。

图2 连接销钉表面轮廓与程序设定的Patterns相似
2.相机拍照后拧紧枪不动作
发动机装配至飞轮离合器连接螺栓拧紧站后,照相机对离合器表面进行取像,受到周围环境影响,在取像时离合器表面曝光值不够或曝光值过大,程序中设定的Patterns无法找到图像中具有相似特征的连接螺栓,造成Patterns无法进行移动定位,视觉系统无定位信号输出,拧紧轴无动作。图3所示为正常情况下,相机拍照后Patterns自动找正连接螺栓;图4所示为离合器表面曝光值不当时,Patterns无法识别相似特征,定位信号无法输出。
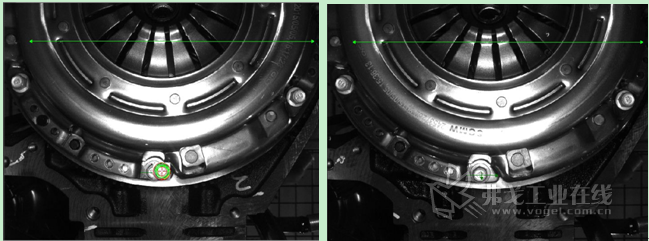
图3 正常动作时Patterns找正螺栓 图4 曝光值不当Patterns不动作
解决方法
由于连接螺栓拧紧过程为自动拧紧,拧紧轴定位出错问题不仅会造成发动机返修,降低发动机装配节拍,同时还会带来潜在的装配质量风险。问题解决思路为从发动机装配过程出发,在不进行零件变更的情况下解决拧紧轴定位出错问题,提升连接螺栓自动拧紧站的一次拧紧合格率(FTQ),同时强化装配质量。经分析,导致拧紧轴定位出错的原因在于图像成像后程序中设定的Patterns无法正确的找到匹配对象,为此在图像评估工具程序中对Patterns进行调整,使其适用于各种情况将是解决问题的一个快速有效的方法。
1.增加判定副程序
出现拧紧轴找错螺栓问题的直接原因在于连接销钉及连接螺栓在图像中的轮廓类似,导致程序中设定的Patterns找正连接螺栓过程中移动位置出错。针对此类误判问题,在图像评估程序中增加一道判定副程序,副程序中设立另一个Patterns,当相机所取图像出现误判时启用副程序对该图像进行评估,评估程序将根据副程序中的Patterns移动位置进行位置信号输出。对大量图像进行对比分析发现,当所取图像某项特征值大于10时,使用主程序进行评估则会发生误判现象,反之则不会。根据该点,在相机拍照后,程序将先对所取图像进行该项特征值比对,当图像特征值小于10,则使用默认程序对图像进行评估;当图像特征值大于10时,则使用副程序对图像进行评估。图5、图6所示为默认程序与判定副程序Patterns的对比值,图7所示为增加判定副程序后图像评估流程示意图。
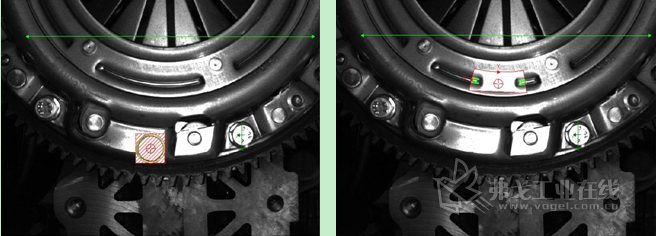
图5 默认程序Patterns 图6 红线区域为副程序Patterns
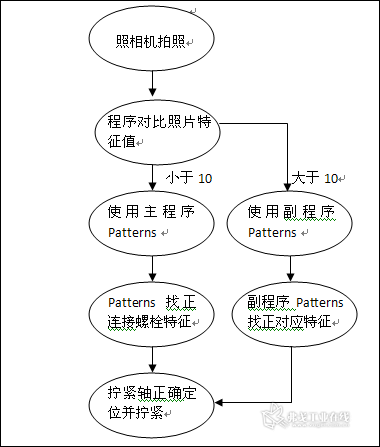
图7 增加副程序后图像评估流程
通过对大量图像进行分析,找出不同图像的差异点后在图像中设立判定副程序,有效的解决了视觉技术引导离合器螺栓拧紧定位过程中出现的定位错误问题,从而提升了该工位FTQ。
2.使用双重判定程序
相机拍照后拧紧轴不动作问题的原因在于受到环境因素的影响,照相程序中设置的曝光值不满足图像评定程序要求,导致相机取像后程序的Patterns在所取图像中无法找到与之匹配的区域,Patterns不动作。
针对该问题,在图像评估程序中增加一组平行判定程序,两组程序的Patterns不同,在相机取像后两道程序同时对所取图像进行评估,两组程序中只需有一组的Patterns能找正符合特征,即可给拧紧轴输出动作指令。当两组程序都可以找正符合特征时将优先选用默认程序的输出结果。该方法要点在于增加了一道平行程序,提高了程序判定的可靠性,从而有效地降低了拧紧轴不动作问题发生的频率。图8所示为增加图像评估副程序后视觉系统引导拧紧轴进行定位的流程示意图。
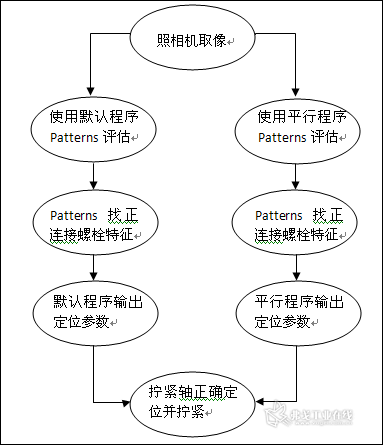
图8 使用平行程序时图像评估流程
3.实施效果
针对发动机连接螺栓自动拧紧站出现的两种典型问题,分别使用以上两种方法对视觉系统进行程序优化后,连接螺栓自动拧紧站的FTQ得到了明显的提升。表1所示为程序优化前后每班次生产发动机FTQ对比情况。

结语
本文对视觉技术应用于某发动机飞轮离合器连接螺栓拧紧过程中出现的两种典型问题进行了原因分析,并运用在视觉评估程序中分别增加防错程序及平行判定程序的方法将飞轮离合器连接螺栓自动拧紧站的FTQ由最初的88.3%提升至98.8%左右,满足了发动机装配线对该自动拧紧设备的要求。













![]()
2001-2009 Vogel Industry Media版权所有 京ICP备09051372号 京公网安备110102001177号


跟帖
查看更多跟帖 已显示全部跟帖