智能化的外骨骼机器人在汽车制造业的应用
外骨骼机器人在汽车领域的应用
近年来,外骨骼机器人发展迅速,在汽车制造领域,国外汽车主机厂机械外骨骼的应用比较广泛。工人们会穿戴上机械外骨骼,在使用机械外骨骼的过程中,外骨骼能够限制工人身上特定部位的压力,以此来保护工人,防止工人受伤并且减轻疲劳。
1.上肢外骨骼机械
(1)动态站立式作业
对于长时间站立作业,例如从事汽车零部件物流分拣、冲压和焊装工位间零部件搬运、装配等作业的人群,作业人员在不断弯曲与直立两种状态中频繁进行切换,如果将外骨骼机器人引入此类作业中,员工穿戴上肢外骨骼可以有效降低作业人员腹部、脊椎和颈椎等部位的劳损度。
上肢外骨骼的设计重点部位设置在腹部与髋部的结合处,背部支撑杆贴合人体,其形状与背部具有相似弧度,将髋关节与腹部结合点设计为3个自由度,以满足作业人员6个方向的运动。由于助力部位为腰部及背部,外骨骼只需上半身穿戴即可。
(2)静态站立式作业
通常用于长时间需要托举工具来完成作业的人群。例如汽车总装、焊装车间车身底部零部件装配、打磨和补焊等作业,作业人员上肢需要托举工具长时间保持作业姿态。外骨骼机器人将作用于人体的压力转移至地面,其造型需贴合人体背部曲线,提高长时间静态作业舒适度,从而有效防止头顶作业造成的肩部损伤,帮助工人分担重量来缓解工人的肩部压力。
2.下肢外骨骼机械
通常用于汽车装配流水线长时间保持半蹲姿态装配、搬运等作业人员。通过设置一个坐垫作为人体对外骨骼施压的缓冲区域,在外骨骼的膝关节处设置限位,作业人员下蹲到一定角度时,将大腿和小腿部位的转轴卡死,从而产生一个向上的支撑力。膝关节处的阻尼装置为穿戴者下蹲时提供适当速度的外力支持,降低作业者长时间下蹲对膝盖的损伤。
机械外骨骼的设计
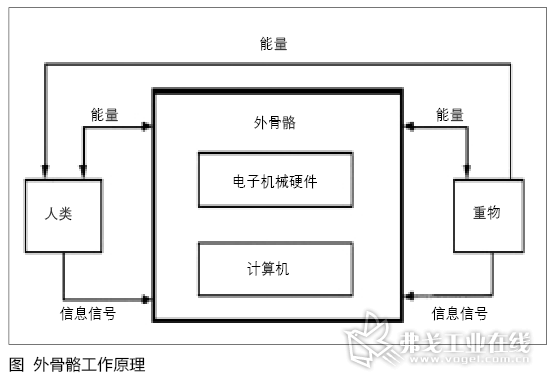
1.工作原理
机械外骨骼原理就是用高功率密度的驱动装置,非刚性连接套装在人体外,辅助人类肢体运动,这是一种柔性、智能的驱动系统。
力学传动原理与汽车的助力转向系统有相通的部分。载货汽车最早使用液压助力转向系统,现在也有液压与机电混合,或者单纯电动的助力转向系统。通俗地说,就是原来用100 N·m的转矩转动汽车的转向盘,有了助力装置,将可能用10 N·m的转矩就可以转动汽车的转向盘。
外骨骼全身布置了传感器,利用安装在各部位的传感器获取各项数据,并传递到中央控制处理器,经过计算来调整外骨骼的动作,最后,通过驱动装置完成一系列动作,如图所示。
2.控制技术
外骨骼机器人的控制模型可以分为感知层、控制层和决策层。控制系统需要确保外骨骼能快速准确地响应人体的各种动作,还要考虑外骨骼与不同穿戴者之间的默契,以适应不同人群的运动特点。
(1)感知层
人体感知和外骨骼系统上的传感器通常用于采集外骨骼机器人系统的多个信息。通过信息融合技术将其融合后输入决策层。再由控制系统从感知层获取信息,包括人体生理信号、人体接触信息、外骨骼运动状态信号。
(2)控制层
分析处理感知层传送的信息,确认控制策略,控制协调人机系统。
(3)决策层
决策结果通过人机耦合接口传入执行层,由执行机构完成外骨骼机器人系统的运转。
3.机械结构
首先,通过研究人体的运动机理,选择合适的自由度,从生物解剖学的角度出发,对外骨骼结构各个关节运动副的优化、主运动自由度分配等。不仅在运动形式上需要保持一致,而且在运动自由度分布上也要保持一致,确保穿戴者与外骨骼运动的一致性、穿着舒适、操作灵活,达到人机一体的效果。
(1)自由度分配
外骨骼各关节部位自由度越大,其灵活程度越大。人体上肢的高适应性和柔韧性,各关节结构及运动较为复杂。上臂通过肩关节连接躯干,前臂通过手肘关节连接上臂。肩关节设置2个自由度,手肘关节设置2个自由度,腕关节设置1个自由度。
人体行走过程中,下肢运动主要是在矢状面内产生,身体其他部位运动都是用来保持人体平衡的。髋关节主要实现下肢的屈/伸运动,为了穿戴舒适性,髋关节设置2个自由度;膝关节是人体结构中较为复杂的关节,在矢状面内做屈/伸运动,故设置1个自由度;踝关节为主要运动轴,绕额状面做背屈趾/屈运动,设置1个自由度。
(2)材料选择
目前常用材料有铝合金、钛合金、碳纤维、陶瓷等材料。外骨骼机器人除了成本和工艺外还要考虑以下几方面:高强度材料的机器人不仅可以满足其使用过程中强度要求,减少零部件截面积尺寸;外骨骼机器人为穿戴式结构,轻量化材料的选择不仅可以提高穿戴舒适性,减轻穿戴者的负担,还可以节约机器人能源消耗;采用较大阻尼材料或增强阻尼,提高定位精度,以及手臂、下肢等在终止构件运动后能平稳停止,不会给人体造成身体损伤。
(3)安全限位
工作时外骨骼机器人与穿戴者直接捆绑接触,结构的设计要符合安全要求,考虑人体关节所能达到的最大转动角度。外骨骼的关节转动角度过大会造成穿戴者关节损伤和人体受伤等危险,因此,设计限位装置防止在控制系统出错或预期运动判断错误。
(4)承载能力
由于人体的负重大多是通过外骨骼机械结构传递至地面,接触位置应选择人体承压能力较好的区域,以及不影响关节运动的区域。通过采用小质量/惯量运动零件、柔性关节、安全限位等设计,减少意外碰撞过程中外骨骼对人的冲击力。
驱动系统
机械外骨骼的动力驱动系统应当非自锁,就是人通过强制扭动就能对抗助力系统的驱动,从而避免助力系统非正常驱动而造成被驱动人体骨折。对于助力系统,意味着可以将人的姿态“定格”下来。
目前应用在外骨骼机器人上的驱动方式主要包括电动机驱动、液压驱动、气压驱动以及人工肌肉驱动等。
1.电机驱动方式
外骨骼机器人电动机驱动方式有两种:一种是在关节部位上直接安装盘式电动机,利用电动机带动关节转动。优点是结构简单,易维护;缺点是受到电动机尺寸的限制,旋转关节十分笨重。另一种是利用电动推杆驱动,将电动机旋转运动转化为直线运动,推动关节转动。电动推杆一般由电动机和滚珠丝杆组成,电动机通常为直流电动机,电动机转动带动丝杆的螺母旋转,从而使丝杆带动外骨骼机器人手臂、腿、足部分别绕髋关节、膝关节和踝关节等做旋转运动。
2.液压驱动方式
液压驱动是以液体(液压油)为工作介质进行能量传递的一种传动方式,包括动力装置、控制装置、执行装置、辅助装置和工作介质五部分。通过外骨骼传感系统将人体相关信息实时采集传至计算机,计算机控制算法生成控制量传至伺服阀,动力装置液压泵将液压能通过控制装置传递给执行装置液压缸,液压缸将液压能转化为机械能推动活塞杆做直线运动,根据伺服阀的开口大小调节来控制执行装置液压缸活塞杆的位置及速度,推动各关节转化为转动运动。其优点是结构紧凑、体积小且推动力大,因液压油具有不可压缩性,其动态响应快。
3.气压驱动方式
气压驱动是以空气为工作介质进行能量传递的一种传动方式,其原理与液压驱动相似,其优点为无污染、反应速度快等。不足之处是气体可压缩特性,其推力小,运动稳定性和精确性较差。
4.人工肌肉驱动方式
人工肌肉是指一种没有肌肉功能只有表面装饰作用的合成材料,用于整形修补,具有一定肌肉伸缩功能的由硅橡胶和涤纶制成的,体积小巧、柔软、重量轻、工作简单且容易控制的仿生学的产品。采用人工肌肉的驱动方式充分利用拟人化的设计思想,自身材料的可伸展性,不需要像其他驱动方式那样考虑到是否会过行程,因此比较安全。
外骨骼机器人每个转动关节都有两个人工肌肉来回收缩,使关节转动,从而使外骨骼机器人实现运动。人工肌肉具有较好的柔韧性,不会给穿戴者造成伤害,输出力较大,能量转换效率高。
传感器
外骨骼机器人系统中,人是控制中心,外骨骼控制器利用置于人体和外骨骼机器人上的压力传感器、力矩传感器、肌电传感器、加速度传感器和编码器等监测元件,实时精确获取穿戴者的姿态、速度、加速度和受力等信息。通过对人体一系列的信息感知测量,处理器将对比这些信息,从而分析、计算出各个关节运动所需力矩大小,控制相应部位的驱动模块工作。同时控制器对人体和外骨骼的运动状况进行比较分析,形成反馈量,从而确保外骨骼能快速精确地响应人体动作。
目前,获得人类意图有两种方式。
1.直接获取
其中,直接获取操作者意图可以从EMG数据、人和机器人之间的交互力中获得。目前直接获取操作者意图的传感器还不够成熟,如EMG的数据噪声、建模和校准的难度都很大;间接获取的方法是从外骨骼关节获取数据、估计操作者意图然后放大运动效果。
2.间接获取
目前绝大部分外骨骼都是间接获取操作者意图,其方法主要是通过外骨骼硬件检测信号来估计人类意图。这种方法也有一定问题,目前比较严重的就是无法区分操作者的力和外力,这样的话外界的力也会使得外骨骼机器人判断出错,有可能导致外骨骼机器人不稳定或者失控。
结语
目前,国内外大部分外骨骼机器人还处于试验测试阶段,尤其国内汽车主机厂,外骨骼机器人应用十分稀缺,需要加强外骨骼机器人在传感器、驱动方式、材料和能源等方面的不断创新,增强汽车制造业体力劳动者能力,提升外骨骼机器人的柔性化程度及智能化程度,从而保证外骨骼机器人更好地为人类服务。












![]()
2001-2009 Vogel Industry Media版权所有 京ICP备09051372号 京公网安备110102001177号


跟帖
查看更多跟帖 已显示全部跟帖