ADAS系统中的智能网联技术应用原理及实例分析


智能汽车ADAS系统对通信系统要求如下表:

V2X技术的主要特点是:(1)网络拓扑不稳定;(2)外部环境干扰严重;(3)行车轨迹可预测;(4)以小数据包为主。由此发展出了两种研究方向,即专用短程通讯(DSRC)技术和基于蜂窝移网的(LTE-V2X)技术。
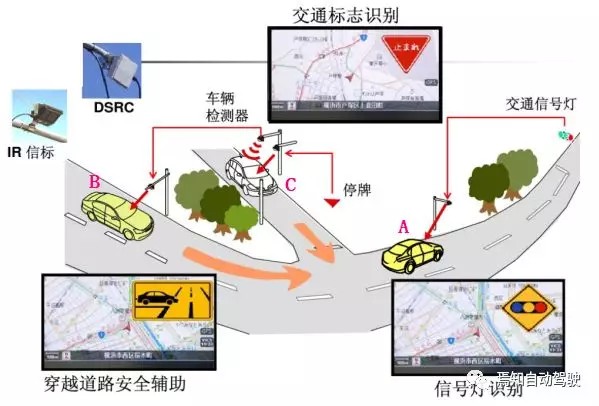
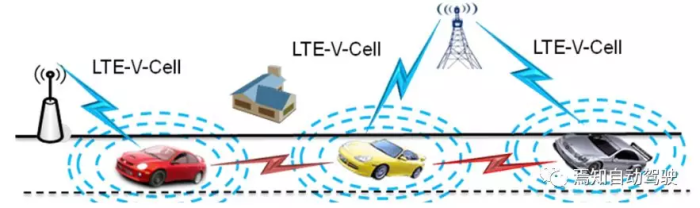
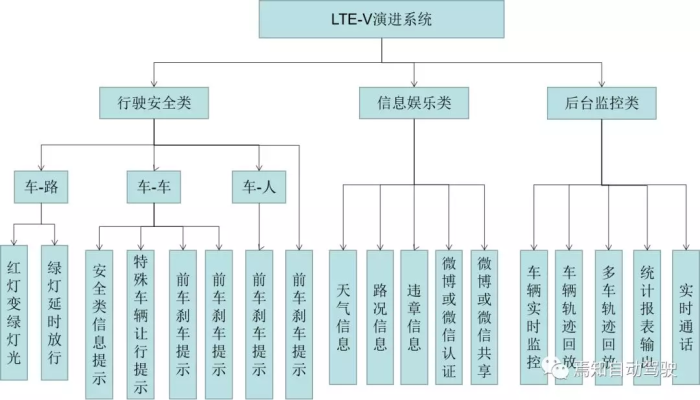
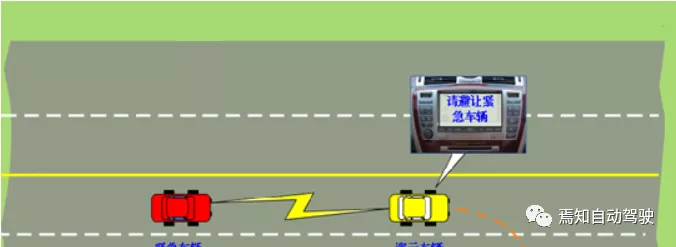
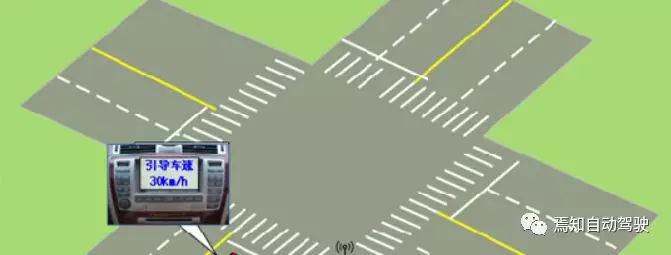

目前,国外供应商对DSRC技术关注度较高,美国、日本有关DSRC的基础设施的研究应用较为先进,已发展出了较为成熟的技术体系,足够实现车际与车路互联。另一种技术方案是近几年发展较为迅速的LTE-V2X技术,其最大的优点在于可以整合现有的通信基站,能够实现低成本、逐层级的改造。另外通信距离较长,信号传输速率快使这项技术具备了较高的可研究性。而其局限性主要在于高速车况下反应延迟时间长,通信安全问题等。
焉知汽车
龚淑娟
李峥
热点文章
-

智能汽车场景化开发:系统融合与 用户体验的协同研究
2026-07-20
-

“泰钽”来了!开启智能越野3.0时代
2026-07-22
-

基于传动效率的多模复合功率分流混合动力系统模式控制研究
2026-07-21
-

乘用车混合动力总成系统设计和性能仿真研究
2026-07-22
-

动力系统主导车市质变,增程器迈入系统竞争
2026-07-23
-

基于深度学习的电驱实验系统设计
2026-07-24
-

-
基于深度学习的电驱实验系统设计
针对传统永磁同步电机建模方法难以兼顾精度与实时性的问题,本文基于深度学习技术提出一种融合物理约束的永磁同步电机降阶模型,通过深度神经网络实现对电机非线性电磁特性的精细化建模。围绕所提降阶模型,搭建了电驱实验系统,并将该模型集成至电驱系统中,实现了实时硬件在环验证。在不同工况下对降阶模型和传统dq轴解析模型开展实验分析,结果表明,所提出的基于深度学习的永磁同步电机降阶模型在保证高精度建模的同时,实现了更好的动态性能。该模型支撑的实验系统可用于电驱系统的快速仿真与控制算法研究,具有良好的工程应用前景。
作者:
-
动力系统主导车市质变,增程器迈入系统竞争
-
“泰钽”来了!开启智能越野3.0时代
-
乘用车混合动力总成系统设计和性能仿真研究
-
基于传动效率的多模复合功率分流混合动力系统模式控制研究
-
智能汽车场景化开发:系统融合与 用户体验的协同研究





评论
加载更多