苹果获两项泰坦项目专利 控制系统与乘用车和可伸缩驾驶员输入设备
据外媒报道,苹果获得了两项有关未来电动汽车系统的泰坦项目(Project Titan)新专利。第一项专利名为“控制系统(Control System)”。
苹果泰坦项目概念图(图片来源:patentlyapple.com)
车辆包括车身、车轮、相对于车身支撑车轮的悬架系统、用于确定车辆前方环境的传感系统和控制系统。该悬架系统包括车轮和车身间传递力的主致动器,以及一个车轮跳动阻尼器(wheel hop damper),而该阻尼器包括移动质量并可在车轮和移动质量之间传递力,独立于车身,从而抑制簧下质量共振,其中簧下质量是由车轮和与其相连的部分悬挂系统形成。
当车轮跳动阻尼器超过容量阈值时,该控制系统会操作主致动器以提供额外的辅助行驶控制。此外,该控制系统会根据环境条件改变容量阈值。而车轮跳动阻尼器可以是反作用质量致动器或调谐质量阻尼器。”
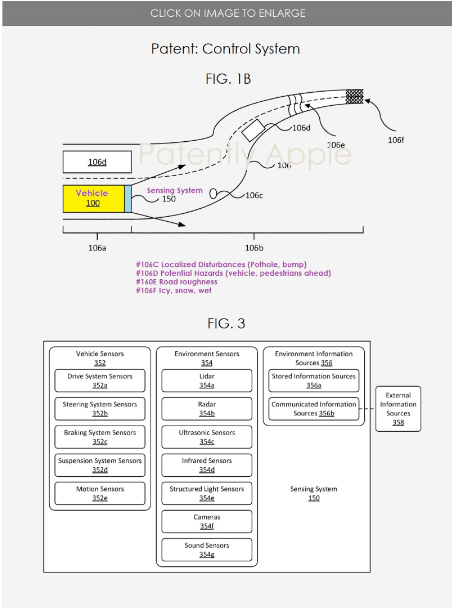
苹果专利图1B是车辆在道路上行驶的示意图。例如,车辆#100可以根据用户输入或运动控制计划(例如,不需要用户持续输入的自动驾驶计划)在前进道路部分#106b上行驶。
该道路还可以包括各种属性,包括局部干扰106c(例如,坑洼或颠簸)、潜在危险106d(例如,前方车辆、相对行驶车辆、行人等)、具有不同粗糙度的区域106e(例如,搓板或光滑),以及具有不同表面条件106f(例如,湿漉、有雪、有冰或干燥)的区域,以及其他特征和属性。
位于车辆前部的感测系统#150主要观察前方道路部分106b,例如用视野(由向前指向的箭头示意表示)或以其他方式确定附近信息。根据这些信息,控制系统160可操作车辆的悬架和其他系统。
图片来源:patentlyapple.com
苹果专利图3所示,该感测系统#150监控车辆状况、监控车辆环境状况,和/或接收、存储或以其他方式获取关于车辆环境的状况信息。
Apple的第二项专利名为“乘用车和可伸缩驾驶员输入设备(Passenger vehicle and retractable driver input devices)”。
乘用车包括车身、驱动和转向系统以及手动和自主控制系统,其中车身为乘客舱;驱动系统负责推动乘用车;转向系统负责使乘用车转向;手动控制系统包括接收用户输入的输入装置,并被配置为当乘用车在手动驱动模式下操作时,可根据用户输入来控制驱动和转向系统;自主控制系统包括用于感测外部条件的传感器,以及根据外部条件自主控制驱动和转向系统的控制器,但仅用于乘用车采用自动驾驶模式。用户输入设备可在第一配置和第二配置间移动,其中第一配置只通过用户物理操作接收用户输入,而第二配置不接收用户输入。
热点文章
-

智能汽车场景化开发:系统融合与 用户体验的协同研究
2026-07-20
-

“泰钽”来了!开启智能越野3.0时代
2026-07-22
-

基于传动效率的多模复合功率分流混合动力系统模式控制研究
2026-07-21
-

乘用车混合动力总成系统设计和性能仿真研究
2026-07-22
-

动力系统主导车市质变,增程器迈入系统竞争
2026-07-23
-

基于深度学习的电驱实验系统设计
2026-07-24
-

-
基于深度学习的电驱实验系统设计
针对传统永磁同步电机建模方法难以兼顾精度与实时性的问题,本文基于深度学习技术提出一种融合物理约束的永磁同步电机降阶模型,通过深度神经网络实现对电机非线性电磁特性的精细化建模。围绕所提降阶模型,搭建了电驱实验系统,并将该模型集成至电驱系统中,实现了实时硬件在环验证。在不同工况下对降阶模型和传统dq轴解析模型开展实验分析,结果表明,所提出的基于深度学习的永磁同步电机降阶模型在保证高精度建模的同时,实现了更好的动态性能。该模型支撑的实验系统可用于电驱系统的快速仿真与控制算法研究,具有良好的工程应用前景。
作者:
-
动力系统主导车市质变,增程器迈入系统竞争
-
“泰钽”来了!开启智能越野3.0时代
-
乘用车混合动力总成系统设计和性能仿真研究
-
基于传动效率的多模复合功率分流混合动力系统模式控制研究
-
智能汽车场景化开发:系统融合与 用户体验的协同研究





评论
加载更多