XiL传感器仿真建模新探索
车辆智能化是现代汽车技术与产业发展的大趋势,环境感知作为其关键核心技术,一直是业内的研究热点。环境感知主要是利用各类传感器收集汽车在行驶时周围环境的状态,进行静态、动态物体的捕捉,针对收集到的原始数据或目标数据完成系统的融合、运算与分析,让驾驶系统可以准确地预判即将发生的危险,从而保证驾驶安全。
根据与真实世界的还原度以及传感器建模的复杂程度,可分为理想/完美传感器、细节传感器、物理传感器。现阶段绝大多数智能驾驶仿真软件对于感知环节的仿真普遍采用完美传感器方案,即从仿真软件的环境数据中提取环境真值并直接作为传感器的测量结果输出,但其无法模拟出实际传感器的真实特性,容易导致由于传感器的仿真准确度不同而引发智能汽车仿真模拟失效。中汽数据基于场景仿真软件完成了激光雷达、相机、毫米波雷达等传感器的产品级仿真建模,通过高精度参数标定,尽可能还原了传感器真实物理特性。
激光雷达
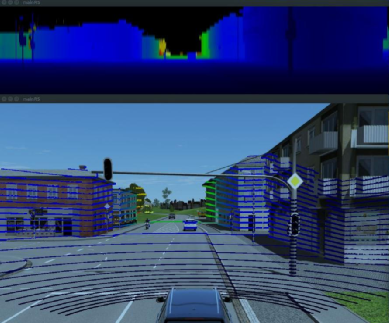
激光雷达仿真模型的建立推动了车辆智能化测评技术的发展进程。利用激光雷达仿真模型进行智能化功能开发测试,特别是危险条件下的试验验证,不但使得仿真测试更加安全与高效,弥补了其因价格高昂带来的实用性不足的缺点,同时消除了试验过程中由于激光雷达算法的不确定性造成的安全隐患。
以中汽数据有限公司建立的激光雷达模型为例,其基于Optix光线追踪的渲染方法,利用场景仿真软件VTD对激光雷达进行仿真,该方法具有计算简单,易于并行的优点。在代码层面发出给定位置和方向的光线,与场景中的物体发生交叉,在交叉点处可得到电磁波与材质发生的交汇行为以及吸收折射漫反射等物理特性,通过调整传感器的固定FOV角、线束、电机转速等参数,完成激光雷达仿真模型建模。为了方便模型的表达,使用激光雷达理想点云以及激光雷达回波强度来体现激光雷达点云生成的机理与影响因素,结合对交通环境中关键场景元素的材质匹配,可以进一步开发基于激光雷达模型的车辆智能驾驶相关应用。
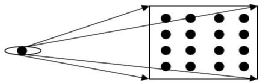
图1 设置点云对应光线顺序
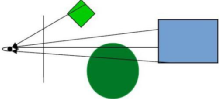
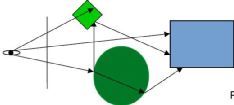
图2 建立光强计算模型
(a)
(b)
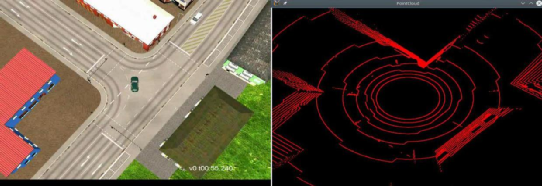
图3 激光雷达仿真效果图
毫米波雷达
车载毫米波雷达是通过天线向外发射毫米波,接收目标反射信号,经后方处理后快速准确地获取车身周围的物理环境信息(如汽车与其他物体之间的相对距离、相对速度、角度、运动方向等),然后根据所探知的物体信息进行目标追踪和识别分类,进而结合车身动态信息进行数据融合,最终通过中央处理单元(ECU)进行智能处理。
毫米波雷达虚拟建模与仿真的挑战一方面来自于雷达的“黑盒”属性——其内部的电子器件特性及结构、数据采集与处理算法未知且多样,另一方面来自电磁散射、地表杂波和环境噪声等干扰的动态随机性,这两方面的挑战使毫米波雷达在电磁波发射、传播、反射以及接收与处理阶段建模难度较高。
在建模的过程中首先对雷达电磁波束进行几何表征。利用光学方法来处理电磁波,得到雷达视锥模型。之后完成视锥可见判断、视锥裁剪判断、遮挡判断。最终根据其在雷达坐标系下的坐标,计算特征点集与雷达的相对距离和方位角,输出雷达范围内目标物体特征点集的坐标、距离与方位角,返回目标物体的ID。
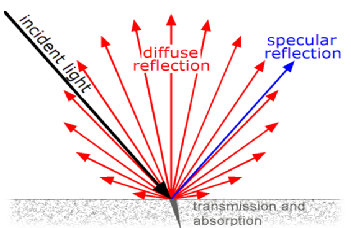
图4 毫米波雷达仿真原理示意图

图5 目标物信息输出
相机
相机传感器模拟主要指针对相机的镜头、CMOS和芯片后处理的整体仿真。在仿真建模中要能够针对实际相机传感器的特点,模拟出实际相机传感器的各种实验特性,克服现有方法中对相机传感器作用机理以及实际相机传感器误差考虑不足的问题。
相机仿真建模的首先要进行实际相机传感器标定试验,通过实验或计算的方法求解相机的内参矩阵、外参矩阵和畸变参数等光学特性。之后对智能车辆仿真环境建模进行修改,模拟光沿直线传播过程,模拟光经过镜头等物件所产生的畸变过程以及模拟相机传感器数据后处理过程。
模拟摄像头畸变是一个非常重要环节。相机畸变是指光学系统对物体所成的像相对于物体本身而言的失真程度,是光学透镜的固有特性,其直接原因是因为透镜的边缘部分和中心部分的放大倍率不一样。相机畸变一般由径向畸变、切向畸变和薄棱镜畸变三部分组成。三者之和构成了整个相机的畸变,可以由畸变系数表示。在仿真模拟过程将对镜头畸变过程的仿真模拟分为两步,分别为基于畸变参数与环境的数据预处理过程,以及数据预处理后根据模拟光沿直线传播过程中计算结果进行的带畸变照片像素点信息的计算。

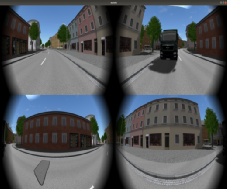
图6 鱼眼摄像头仿真效果图
随着科技的发展,智能驾驶仿真技术将不断升级,大范围应用于智能驾驶技术研发中。目前,中汽数据有限公司基于多年来的驾驶场景数据和仿真工程经验,已为国内多家车企提供了从数据采集→场景库构建→仿真验证全链条的智能网联汽车仿真测试验证方案,其中仿真验证方面包含了台架集成、软硬件开闭环调试、模型开发、视频注入、测试用例设计等内容,具备自动驾驶功能高效、快速实时闭环仿真测试能力。
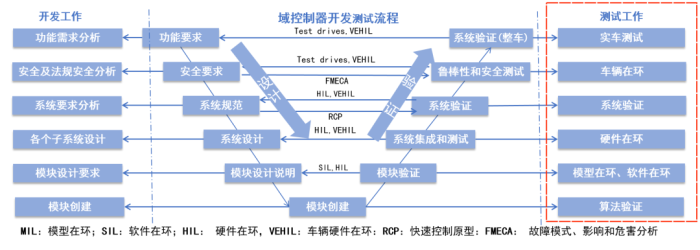
图7 中汽数据全流程XiL在环仿真平台
热点文章
-

智能汽车场景化开发:系统融合与 用户体验的协同研究
2026-07-20
-

“泰钽”来了!开启智能越野3.0时代
2026-07-22
-

基于传动效率的多模复合功率分流混合动力系统模式控制研究
2026-07-21
-

乘用车混合动力总成系统设计和性能仿真研究
2026-07-22
-

动力系统主导车市质变,增程器迈入系统竞争
2026-07-23
-

基于深度学习的电驱实验系统设计
2026-07-24
-

-
基于深度学习的电驱实验系统设计
针对传统永磁同步电机建模方法难以兼顾精度与实时性的问题,本文基于深度学习技术提出一种融合物理约束的永磁同步电机降阶模型,通过深度神经网络实现对电机非线性电磁特性的精细化建模。围绕所提降阶模型,搭建了电驱实验系统,并将该模型集成至电驱系统中,实现了实时硬件在环验证。在不同工况下对降阶模型和传统dq轴解析模型开展实验分析,结果表明,所提出的基于深度学习的永磁同步电机降阶模型在保证高精度建模的同时,实现了更好的动态性能。该模型支撑的实验系统可用于电驱系统的快速仿真与控制算法研究,具有良好的工程应用前景。
作者:
-
动力系统主导车市质变,增程器迈入系统竞争
-
“泰钽”来了!开启智能越野3.0时代
-
乘用车混合动力总成系统设计和性能仿真研究
-
基于传动效率的多模复合功率分流混合动力系统模式控制研究
-
智能汽车场景化开发:系统融合与 用户体验的协同研究





评论
加载更多