有关激光雷达你必须要知道的知识!
激光雷达即“激光探测和测距”,其工作模式同样是 发射-反射-接收-计算,车载激光雷达的激光波长是处于人眼看不到的红外线波段,但这也不代表红外线对人类眼睛无害,尤其是接近可见光的905nm激光,所以相关厂商都会对其功率做出限制。
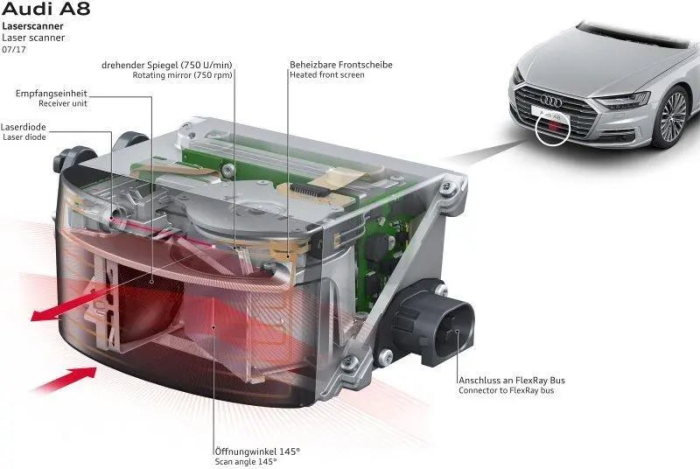
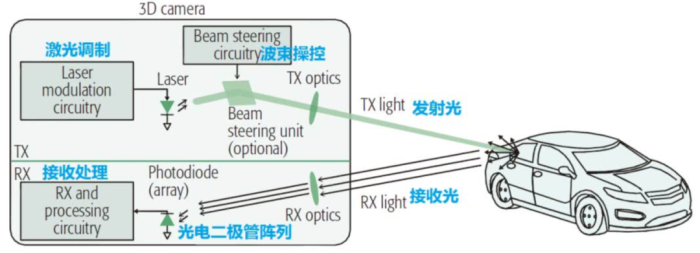
激光雷达是一种环境感知传感器,是雷达技术与激光技术的结合。由于激光本身具有单色性好、亮度高、分辨率高、灵敏度高等良好特性,这使得以激光为载波的激光雷达具有距离分辨率高、速度分辨率高、抗干扰能力强、体积小且不受无线电波干扰等环境感知优势。激光雷达系统大多由发射单元、接收单元、控制单元及信号处理单元四部分组成。
发射单元:激光器、发射光学系统,发射激光束探测信号;
接收单元:接收光学系统、光学滤光装置、光电探测器。接收反射的激光信号即回波信号;
控制单元:控制器、逻辑电路。控制激光激发、信号接收及系统工作模式;
信号处理单元:信号处理、数据校准与输出。光电转换,信号分析,数据获取;
激光雷达的物理原理本质上就是“距离=速度*时间”,通过测量激光信号的信号差和相位差来确定距离。相较于发射电磁波的毫米波雷达和发射机械波的超声波雷达,激光雷达主动发射波长约为900-1,500nm的激光射线,利用多普勒成像技术,创建出目标清晰的3D图像,是其它传感器无法比拟的感知能力。
激光雷达通过发射和接收激光束,分析激光遇到目标对象后的折返时间,计算出到目标对象的相对距离,并利用此过程中收集到的目标对象表面大量密集的点的三维坐标、反射率和纹理等信息,快速得到出被测目标的三维模型以及线、面、体等各种相关数据,建立三维点云图,绘制出环境地图,以达到环境感知的目的。由于光速非常快,飞行时间可能非常短,因此要求测量设备具备非常高的精度。从效果上来讲,激光雷达线数越多,测量精度越高,安全性就越高。
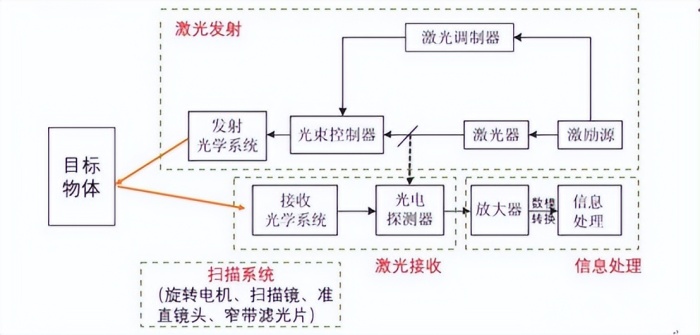
激光雷达核心构成包括激光发射系统、扫描系统(光束操纵元件)、传输与接收光学系统、光电探测器及信号处理系统。其中扫描系统、激光发射器和光电探测器均存在不同技术路线,进而导致激光雷达整机技术路线繁多。目前,激光雷达四大系统包括激光器、光束控制器、FPGA芯片在内的核心元件基本被国外大厂垄断。
激光雷达分类方式多样,根据测距原理、扫描方式、激光发射、激光接收等环节所采取的方案不同,均可对激光雷达进行分类。其中又以测距原理和扫描方式的分类最为常见。按扫描方式正成为车载激光雷达厂商分类定位的主要依据。究其原因,在于扫描技术直接决定了激光雷达的扫描频率、扫描范围、采集数据量等关键技术参数,与最终探测成像质量息息相关。此外,扫描技术的演变还是产品迈向小型化、高性能、低成本的重要一环,是车载激光雷达能否实现商业化量产的关键因素之一。根据内部有无运动器件,激光雷达可分为机械旋转式、混合固态式以及纯固态式三大类别。
当前业界并无终极解决方案。基于探测距离、视场角、信噪比、体积、稳定性、成本控制、技术成熟度等多维度,对于不同测距原理、扫描方式下方案的整理如下表所示,可见不同方案均有各自优劣,主机厂在当前阶段需在不同考量维度中进行取舍。

作为自动驾驶领域传感器的重要组成部分,与激光雷达相关的各类企业非常之多,既包括传统光电领域大佬,也包括各类初创公司,整体来看国内在整机领域初创企业布局较多,而在技术壁垒较高的芯片领域依然以传统大佬公司为主,整理了一张图,从左到右分别是整机--激光器--感光芯片,每个领域上方为国外相关企业,下方为国内相关企业,大家看看可以认出是哪些公司吗!

热点文章
-

智能汽车场景化开发:系统融合与 用户体验的协同研究
2026-07-20
-

“泰钽”来了!开启智能越野3.0时代
2026-07-22
-

基于传动效率的多模复合功率分流混合动力系统模式控制研究
2026-07-21
-

乘用车混合动力总成系统设计和性能仿真研究
2026-07-22
-

动力系统主导车市质变,增程器迈入系统竞争
2026-07-23
-

基于深度学习的电驱实验系统设计
2026-07-24
-

-
基于深度学习的电驱实验系统设计
针对传统永磁同步电机建模方法难以兼顾精度与实时性的问题,本文基于深度学习技术提出一种融合物理约束的永磁同步电机降阶模型,通过深度神经网络实现对电机非线性电磁特性的精细化建模。围绕所提降阶模型,搭建了电驱实验系统,并将该模型集成至电驱系统中,实现了实时硬件在环验证。在不同工况下对降阶模型和传统dq轴解析模型开展实验分析,结果表明,所提出的基于深度学习的永磁同步电机降阶模型在保证高精度建模的同时,实现了更好的动态性能。该模型支撑的实验系统可用于电驱系统的快速仿真与控制算法研究,具有良好的工程应用前景。
作者:
-
动力系统主导车市质变,增程器迈入系统竞争
-
“泰钽”来了!开启智能越野3.0时代
-
乘用车混合动力总成系统设计和性能仿真研究
-
基于传动效率的多模复合功率分流混合动力系统模式控制研究
-
智能汽车场景化开发:系统融合与 用户体验的协同研究





评论
加载更多