无人驾驶技术的机器人技术Robotics、人工智能AI及云技术Cloud
无人驾驶技术 = 机器人技术Robotics+ 人工智能AI + 云技术Cloud。
相关定义还是比较受业内认可的。
如上提到的环境感知、控制执行更多的和机器人技术相关,决策规划则相当于机器人技术 + 人工智能AI。这方面原文已有一定涉及,定位导航则和高精度地图关联,相关的路径规划可能会调用相关云技术。
小星将Robotics机器人技术突出为汽车感知传感器技术,以及将Cloud云技术突出为互联技术V2X,主要想表达相对中美差距比较大的部分。不过确实因此表达不够全面。因此补充相应的Robotics机器人技术和Cloud云技术如下。
机器人技术Robotics
既然原文主要涉及汽车感知传感器技术,如下补充一些控制执行的内容。
由于汽车电气化是除无人驾驶外的另一大汽车发展趋势,因此国内相关的开发起步相对并不晚。相对的中美差距也并不大。
特别是混合动力控制器和电驱动控制器方面,中国政策推动力度很大。很多整车厂都有自主研发,再次不多赘述。
我们针对无人驾驶所需要的刹车控制和转向控制技术重点介绍。
a. 电子线控刹车(Brake By Wire)
电子线控刹车(Brake By Wire):这个线传操控系统的出现可以说最主要的诱因就是电动汽车的出现。因为传统刹车系统需要通过发动机的工作建立制动助力所需的真空助力。是的,刹车也是需要助力的。如果大家家里有车可以试一下,在发动机熄火的情况下,最多可以深踩3次刹车。再踩的话就会觉得刹车踏板特别硬,几乎无法靠人力踩动。如下图就是传统刹车系统所需的真空助力器和传统系统和电子线控刹车系统(又称电子液力刹车系统EHB)系统对比图。可以看到真空助力器是一个非常大的家伙,你可以很容易在发动机舱内找到它。当驾驶者踩下刹车踏板时踏板连接的推杆将力传递到真空助力器。真空助力器是一个通过大气压和真空之前的压力差将力矩放大然后传送给液压制动总泵进行制动的装置。真空源是由发动机的负压产生的(发动机吸入空气的时候会产生负压,但不是所有的发动机都能够找到真空源,比如涡轮增压发动机)。由于采用气压差来放大力,因此其体积必须做的很大,占空间又不容易布置。电动车或者纯电行驶的插电式混合动力汽车,由于没有发动机或者发动机不工作,无法获得稳定的真空源。一种方法是使用电子真空泵。但是电子真空泵需要持续运转,比较耗油。另一种更加智能的方法就是使用电子线控刹车系统。传统的刹车系统(第2图上半部分)驾驶者踩刹车踏板,通过推板经过真空助力器放大力矩给到制动总泵。制动总泵驱动液压系统传递刹车力到ABS/ESP刹车防抱死/电子稳定系统控制器。ABS/ESP再根据车辆状况把刹车力分配到四个车轮。
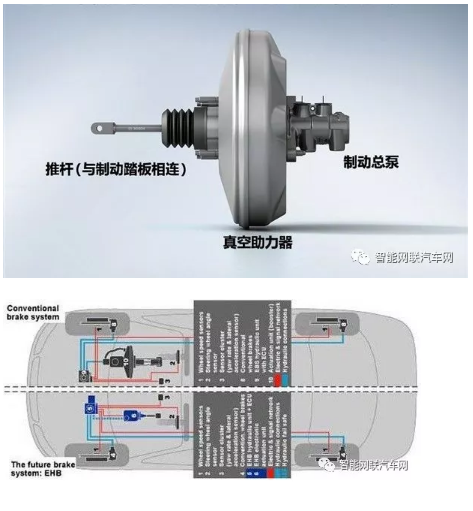
那么EHB系统基于电机的刹车助力器到底是什么样子的呢?我们就基于市场上的两大解决方案举个例子。首先要说的就是如下图所示的来自德国博世BOSCH的iBooster系统。
博世 iBooster所属新的EHB系统(上图下半部分)将驾驶者踩刹车踏板的动作转换成行程位置电信号,刹车助力控制器控制电机给出刹车助力所需的力矩给到制动总泵。制动总泵驱动液压系统传递刹车力到ABS/ESP刹车防抱死/电子稳定系统控制器。ABS/ESC再根据车辆状况把刹车力分配到四个车轮。


而另一大解决方案就是如下图所示来自德国大陆汽车Continental的MK C1系统。可以看到MK C1的主要理念和博世 iBooster基本相同。但是MK C1更进一步将原来的ESC系统MK 100中的ESC控制器,真空泵,真空助力器三个部件合而为一。大大简化了系统的复杂程度。

那么博世iBooster在国内的一个最早的成功案例就是目前比亚迪E6所用的刹车系统。该电子线控刹车系统可以灵活的在电机能量回收制动和机械刹车片摩擦制动之间进行分配。并且当纯电机能量回收制动的时候为了给驾驶者一个合理的刹车踏板力回馈,刹车助力电机还能够反向给出一个阻力力矩。让驾驶者感觉到合理的阻尼感受。同时电子线控刹车系统还能够提供可选择的刹车响应模式。比如运动模式下刹车就一踩就有,响应灵敏。而舒适模式下,刹车就显得柔和线性,相较运动模式没有那么紧绷。和驾驶辅助系统结合以后,当检测到可能的碰撞时则可以加快制动响应或者直接增加制动压力。使得车辆能够在更短的距离内停止下来。
说到电子线控刹车系统的安全性,更偏向一个系统级的安全方案。电子线控刹车系统中的电子刹车助力器和传统的电子稳定系统ESC以及电子转向助力系统EPS三者互为备份。三者中的任何一个模块出现故障,另两个模块都能够部分覆盖故障模块的功能。比如电子刹车助力器出现故障,电子稳定系统ESC将能建立制动液压压力,配合EPS将车辆安全刹停在车道内。相反如果电子稳定系统ESC出现故障,电子刹车助力器可自行建立制动液压,配合EPS将车辆刹停在车道内。当电子助力转向EPS失效时,电子稳定系统ESC将通过对不同侧的车轮施加不同刹车力产生扭矩矢量,将车辆保持在车道的中心位置。
b. 电子线控转向(Steering By Wire)
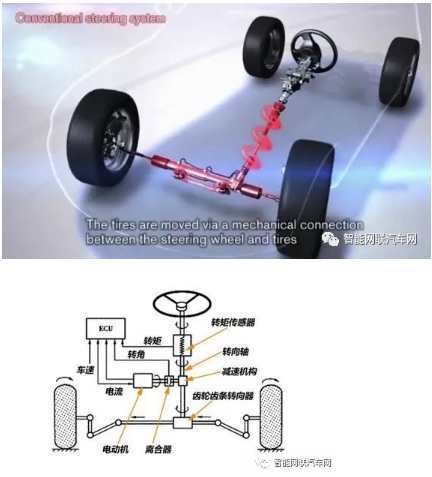
相信大家目前接触到的车辆都是带转向助力的。转向助力主要分两大类,一类是液压转向助力,另一类是电子转向助力。液压转向助力的一个弊端就是不管是否转向,液压系统都要通过发动机传输过来的动力位置助力油压。因此系统复杂,且耗油。而电子转向助力通过电机在需要转向的时候提供助力,而不需转向时是不耗油的。而且系统较液压助力系统简单很多。如下即是电子助力转向系统的示意图和系统构架图。
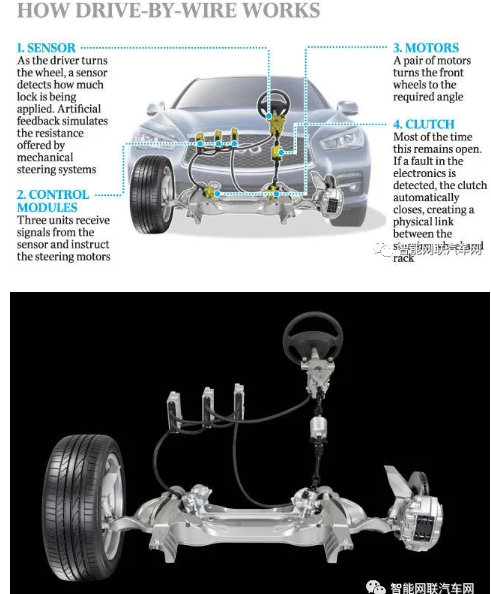
而今天介绍的电子线控转向系统可谓是电子转向助力的进阶版。因为电子线控转向系统在正常工作时断开了方向盘和转向系统之间的机械连接,而完全靠电子信号传输给转向控制器然后操控转向执行器实现。电子线控转向系统的代表车型就是英菲尼迪的Q50,目前该车型已经国产,称为Q50L。由于采用了电子线控转向系统,车辆的转向特性可以智能的调节,比如偏沉稳还是偏轻盈灵动。并且结合驾驶辅助系统的车道识别功能还能主动的修正车辆行驶方向保持在车道中间位置行驶。下图即为英菲尼迪Q50电子线控转向系统的示意图和展示照片。
那么如果电子系统出现故障,驾驶者发现转动方向盘完全不能控制车辆转向的时候是一件非常恐怖的事情。因此整个系统充分考虑了安全性。当转向系统工作在电子线控模式的时候,整个系统借鉴了飞机电传飞操系统的多余度安全理念。通过3个转向控制器相互冗余地控制转向系统。相互之间进行校验,保证控制信号始终和驾驶者的转向意图相关。下图为转向系统工作在电子线控模式。此时转向系统和方向盘断开连接,由电子控制器控制。
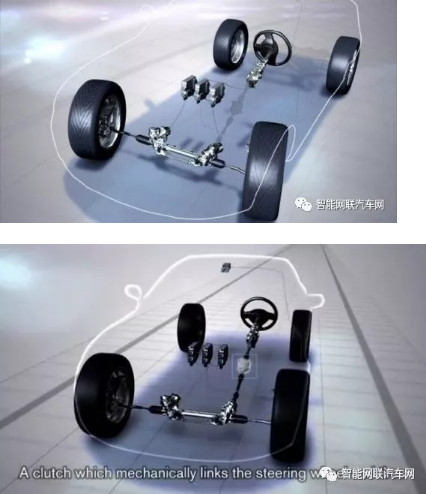
目前电子线控转向系统还没有全面市场化,仅在少数车型上出现。其中主要原因是前面提到的转向特性智能调节和自动车道保持等功能在某种程度上仍可以使用传统的电子助力转向系统实现。那么电子线控转向系统的真正意义是将来系统成熟以后可以完全断开机械连接。从而为将来的无人驾驶汽车服务。如下图的无人驾驶概念车,车内的乘员可以直接控制方向也可以交给自动驾驶而分别躺下。方向盘位置可以灵活移动,无疑为空间的利用将更加高效。而这就需要电子线控转向系统的支持。

云技术Cloud
既然原文未涉及到高精度地图部分,如下补充一些基于云技术的相关技术。
由于国内对于地图测绘的管控,因此国内高精度地图还是掌握在国内企业手中的,比如四维图新。因此这方面并没有明显的中美差距。特别最近国内企业收购高精度地图供应商HERE的股份,更是缩小了技术差距。
那么如下主要提一下比较新的基于云技术的地图采集优化技术
地图数据众包采集concocting Crowd-Sourced Mapping Data技术
通用汽车将把Bolt最为一个平台Platform来不断对其软件进行升级学习。从而向最终的全自动驾驶目标而演进。在CES2016的演讲中玛丽贝拉(通用汽车CEO)透露了通用汽车正在和驾驶辅助系统的领导供应商Mobileye进行合作开发自动驾驶项目。其传统自动驾驶功能主要应用于良好的高速公路,必须有规范化的车道线和指示信号灯或路牌。而通用汽车和Mobileye开发的系统则可以基于每辆装备安吉星OnStar 4GLTE技术的通用品牌汽车将各个路段的车道线和指示信号灯或路牌图像信息通过移动网络上传到云进行统一计算。这样具备这种技术的自动驾驶汽车就可以基于云数据快速学习多变复杂的道路,最终实现良好的自动驾驶体验。下图为通用汽车和Mobileye开发的地图数据众包采集自动驾驶系统概念图。

智能网联汽车网
龚淑娟
李峥
热点文章
-

智能汽车场景化开发:系统融合与 用户体验的协同研究
2026-07-20
-

“泰钽”来了!开启智能越野3.0时代
2026-07-22
-

基于传动效率的多模复合功率分流混合动力系统模式控制研究
2026-07-21
-

乘用车混合动力总成系统设计和性能仿真研究
2026-07-22
-

动力系统主导车市质变,增程器迈入系统竞争
2026-07-23
-

基于深度学习的电驱实验系统设计
2026-07-24
-

-
基于深度学习的电驱实验系统设计
针对传统永磁同步电机建模方法难以兼顾精度与实时性的问题,本文基于深度学习技术提出一种融合物理约束的永磁同步电机降阶模型,通过深度神经网络实现对电机非线性电磁特性的精细化建模。围绕所提降阶模型,搭建了电驱实验系统,并将该模型集成至电驱系统中,实现了实时硬件在环验证。在不同工况下对降阶模型和传统dq轴解析模型开展实验分析,结果表明,所提出的基于深度学习的永磁同步电机降阶模型在保证高精度建模的同时,实现了更好的动态性能。该模型支撑的实验系统可用于电驱系统的快速仿真与控制算法研究,具有良好的工程应用前景。
作者:
-
动力系统主导车市质变,增程器迈入系统竞争
-
“泰钽”来了!开启智能越野3.0时代
-
乘用车混合动力总成系统设计和性能仿真研究
-
基于传动效率的多模复合功率分流混合动力系统模式控制研究
-
智能汽车场景化开发:系统融合与 用户体验的协同研究





评论
加载更多