无人驾驶汽车如何实现无缝驾驶
为了让自动驾驶汽车成为技术的福音,它需要一个能够智能处理周围环境的系统,协助其应对复杂的交通场景、路障、坑洼、车道、车道标记或路上经过的任何车辆。只有当它像人类一样对外部世界有感觉时,上述功能才能实现。自动驾驶需要与其他车辆、乘客和周围的交通参与者进行沟通,这样它就可以确定道路上的确切位置,并决定在当前情况下如何行动。
汽车到汽车和汽车到基础设施的通信对于实现自动驾驶是必不可少的,并且这种情况只有当其在地图上对现实世界有精确到厘米级的数字三维表示时才会实现。地图上的数据是自动驾驶车辆导航的主要来源,它就像一双给予自动驾驶汽车情景感知的眼睛。
高清晰度地图作为这个系统的重要组成部分,为自动驾驶车辆带来高精度定位、环境感知、规划决策以及实时导航云服务等功能。
地图如何帮助自动驾驶汽车实现沟通
支持自动驾驶的地图可以持续不断地检测、验证和更新世界上发生的变化。它由四个简单的步骤构建而成,分别是收集、整合、创建和发布,以此来协助汽车之间的通信。因此,让我们浏览每个部分,了解整个过程如何帮助自动驾驶汽车完美地在道路上行驶。
01.收集
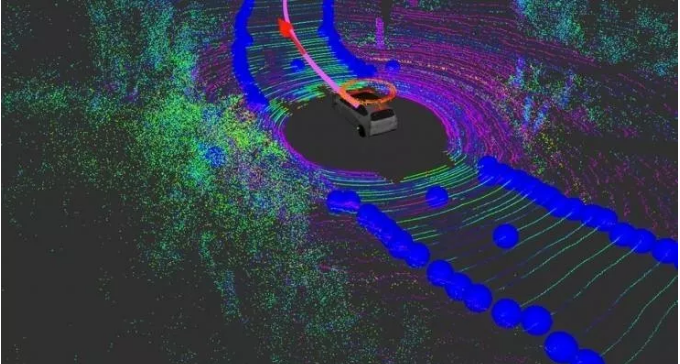
自动驾驶汽车通过安装在汽车上的各种传感器收集数据,如照相机、激光雷达和雷达。这些数据被传输回云。这些众包数据可以是从封闭车道和障碍物到路标,再到为自动车辆系统的运行和车辆的决策提供重要信息的路面标线的任何东西。然而,仅凭这些传感器数据是并不能精确、充分地取代驾驶员的地位。
02.整合
自动驾驶汽车有不同的形状和大小,传感器也放置在不同的地方,跟随着汽车行驶到不同的地方。在所有这些条件下,它们以自己的方式感知物体,因此获取的数据也是不同的。目前借助于机器学习算法,将不同车辆采集的数据融合在一起,以便使其具有准确的特征。
03.创建
一旦数据被融合并生成了精确的数据,就可以借助精确的算法和独特的特征来创建地图。在地图上,所有关于物质世界的准确信息都会被表示出来。它确定了任何物体的准确位置。这个过程是使用高级算法完成的,该算法会考虑汽车收集到的各种变量,然后为地图创建特性。对于某些特定的特征,可能需要10次、20次,甚至100次的观察。这完全取决于算法何时开始将多个特征转化为一个精确的特征。
04.发布
一旦生成了所有数据并创建了地图,其将会被更新并发布。为了确保最高效的数据传输,只有在特定层的特定板块——道路模型、高清车道模型和高清定位模型中发生的更新才会被发送到原始设备制造商的云和车辆上。使用平铺格式,无线更新可以被进一步压缩后发送,以提高效率、优化数据交换。一旦一个新特性发布,在道路的特定区域可能需要增强的传感器数据。例如,汽车可能由于障碍物而无法识别停车标志。在这种情况下,地图会要求该区域的下一辆车拍摄一段环境视频,这样系统就可以更好地验证数据。这项功能是通过传感器数据请求接口(SDRI)实现的。
05.三层信息系统
被发布的地图有三层,每一层都提供了详细准确的信息,以支持自动驾驶车辆与外部环境和其他车辆进行连接与通信。第一层是道路模型,它提供全球范围覆盖,帮助车辆理解其车载传感器无法理解的局部情况(如高占有率车道或特定国家的道路分类)。第二层是是高清车道模型,用于提供车道方向、车道类型、车道边界和车道标记类型等更精确的车道级细节。这些细节有助于自动驾驶汽车在驾驶中做出更安全、更令人舒适的决策。第三层是高清定位模型,这一层帮助车辆在周围环境中定位自身,并帮助车辆识别护栏、墙壁、标志、杆子等物体,然后利用物体的位置向后测量,准确计算出车辆所处的位置。
Geospatial World
龚淑娟
李峥
热点文章
-

智能汽车场景化开发:系统融合与 用户体验的协同研究
2026-07-20
-

“泰钽”来了!开启智能越野3.0时代
2026-07-22
-

基于传动效率的多模复合功率分流混合动力系统模式控制研究
2026-07-21
-

乘用车混合动力总成系统设计和性能仿真研究
2026-07-22
-

动力系统主导车市质变,增程器迈入系统竞争
2026-07-23
-

基于深度学习的电驱实验系统设计
2026-07-24
-

-
基于深度学习的电驱实验系统设计
针对传统永磁同步电机建模方法难以兼顾精度与实时性的问题,本文基于深度学习技术提出一种融合物理约束的永磁同步电机降阶模型,通过深度神经网络实现对电机非线性电磁特性的精细化建模。围绕所提降阶模型,搭建了电驱实验系统,并将该模型集成至电驱系统中,实现了实时硬件在环验证。在不同工况下对降阶模型和传统dq轴解析模型开展实验分析,结果表明,所提出的基于深度学习的永磁同步电机降阶模型在保证高精度建模的同时,实现了更好的动态性能。该模型支撑的实验系统可用于电驱系统的快速仿真与控制算法研究,具有良好的工程应用前景。
作者:
-
动力系统主导车市质变,增程器迈入系统竞争
-
“泰钽”来了!开启智能越野3.0时代
-
乘用车混合动力总成系统设计和性能仿真研究
-
基于传动效率的多模复合功率分流混合动力系统模式控制研究
-
智能汽车场景化开发:系统融合与 用户体验的协同研究





评论
加载更多