底盘域控化发展趋势与对策研究
0 前言
在新能源汽车产业飞速发展的背景下,智能底盘技术因其在安全、节能、环保和舒适方面的突出优势,得到了日益广泛和深入的应用,并将通过技术创新体系助力新能源汽车产业与大数据、物联网等新技术的协同发展,实现汽车与绿色能源、智能交通和智慧城市深度融合的智能电动出行。
智能底盘控制执行技术是智能汽车的基础,需要解决底盘多执行器协同控制、协同执行等关键技术难题,这些难题一直以来都困扰着国内外汽车行业。当前车辆各功能控制系统均只针对单一车辆性能指标进行设计,但事实上,底盘的多个控制系统在车辆行驶过程中又是相互影响、相互制约的。
底盘域通过对当前底盘悬架、制动以及转向等各部件传感器进行信号融合,精确量化行驶过程中车辆安全稳定运行的边界条件,进行驾驶员意图识别及底盘多目标多系统综合优化,实现底盘多系统协同控制,从而实现车辆动力学集成控制,能够解决各个执行机构耦合冲突的问题。
从产品维度上讲,底盘域控制器在系统、软硬件上要具备通信冗余、电源冗余、感知冗余和主控制器冗余等设计,且遵循功能安全和信息安全的设计流程,具备在故障模式下的降级或安全接管能力,保证底盘的承载与行驶功能安全可靠。
同时,要具备强大的硬件计算能力和丰富的软件接口,可以实现软硬件解耦以及功能与硬件解耦,有利于支持OTA升级,从而实现核心算法的快速迭代和优化。
1 底盘域控化现状
国外在底盘协同控制的研发方面由于其在传统汽车上的技术积累以及先发优势,已有一定的成型产品。国内一些自主整车企业和零部件供应商已开始进行底盘协同控制的研发,虽然与博世等国际巨头仍存在一定差距,但产业尚处于发展早期阶段,还有较大的追赶机会。
目前国外厂商的产品主要包括博世集成式车辆动态控制系统(IVC)、采埃孚cubiX底盘一体化控制器和保时捷4D底盘控制系统。
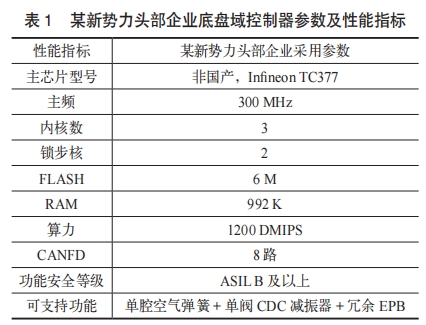
国内厂商基于国外主控芯片开发了类似底盘域控的架构,目前仅蔚来实现了底盘域控制器的量产。蔚来的产品集成了冗余驻车、单腔空气悬架和单阀减振器等基本控制功能,但未实现真正的X/Y/Z协同融合控制,可通过调校改善底盘的舒适性和操控性。长城汽车的GEEP域控制架构包含中央计算、智能座舱及高阶自动驾驶3个计算平台,外加3个区域控制器(左、右、前)组成,未涉及底盘域控制器。某新势力头部企业底盘域控制器的参数及性能指标见表1。
2 底盘域控化发展面临的困难
(1)底盘域控制器功能安全需满足最高等级ASIL-D,对控制器整体要求较高。其一,控制器的主芯片要满足AEC-Q100Grade1的可靠性品质规范,工作温度范围为-40~125℃。需采用-40~125℃的SPICE器件模型,对现有的模拟IP模块的电路进行仿真,根据仿真情况进行温度补偿电路的设计和优化,使得电路在-40~125℃宽温区范围都能满足设计目标。
(2)主芯片需采用锁步(Lock-Step)的方式对数据流进行双硬件实时对比,同时对总线的数据采用统一算法的CRC和ECC检错和纠错。控制器电源芯片、CAN收发器和功率驱动模块均需采用冗余设计方案,以确保功能安全目标的实现。
(3)底层软件架构按照CPAutoSAR标准,制定相应的国产化解决方案来支撑国产芯片的应用,同时满足ASIL-D的要求。
(4)运用功能场景法、错误推断法和因果图法制定高覆盖度的DVP试验大纲和软件测试用例,对底盘域控制器功能进行测试和优化。
底盘域控制器要对多个传感设备数据进行分析,实现预瞄控制,需要应用强化学习控制算法,基于大量的数据来调整和优化模型参数,使算法的准确度达到预期,其核心在于算力。为了提升芯片的算力,需要打破国外芯片锁步核两两绑定的工作模式,可根据应用场景灵活配置内核为锁步模式或者分割(Split)模式,当Core0与Core1工作在锁步模式,Core2与Core3可配置为分割模式,则可以提供3个独立运行的内核以提供更高算力。
底盘X/Y/Z协同控制算法需要基于多源异构传感器,开发底盘传感器信息融合校验专用算法,以准确判断出驾驶员意图、路面坡度、附着系数、轮胎各向力以及车辆质心侧偏角等关键状态信息。
在此基础上,构建车辆16DOF全局动力学观测体系,结合车辆状态信息,合理判定车辆稳定性边界,基于强化学习等智能算法深入研究多自由度动力学模型的精确实时解算方法,实现运动特性精确量化表征与预瞄车辆各向运动特性,探索车辆在复杂环境下的稳定运行边界条件,是开发底盘X/Y/Z协同控制算法需要解决的技术难题。
线控底盘X/Y/Z各子系统之间存在强耦合、多干涉、性能彼此影响以及控制相互关联的特点。在统筹考虑车辆状态、各子系统执行器状态以及路面环境状态的基础上,分析纵横垂向动力学耦合机理,计算最大动力学控制边界,并建立基于轮胎附着椭圆、车辆稳定裕度以及系统能耗的最优分配方法,通过对执行器的最优化分配,实现各子系统之间的均衡优化协同控制以及失效冗余容错控制,并建立最优分配统一解算模型,是本研究一项技术难点。
3 促进底盘域控化发展的对策
(1)硬件开发策略
1)芯片选择和性能优化。底盘域控制器需要处理大量的传感器数据和控制指令,要求芯片具有高速的计算能力和通信能力,同时要满足汽车级的可靠性和安全性。芯片的选择和性能优化是硬件开发的关键环节,需要考虑芯片的架构、接口、功耗、温度以及成本等因素。
2)硬件抽象和标准化。底盘域控制器需要与多个子系统和执行器进行协调和控制,要求硬件具有良好的兼容性和扩展性,能够适应不同的传感器和执行器。硬件抽象和标准化是硬件开发的重要目标,需要建立统一的接口和协议,实现硬件资源的共享和服务。
3)硬件测试和验证。底盘域控制器涉及车辆的动态性能、安全性和智能化水平,要求硬件具有高度的稳定性和可靠性。硬件测试和验证是硬件开发的必要环节,需要进行严格的仿真、实车和场景等测试,保证硬件满足功能、性能和安全等要求。
4)协同控制的平台。底盘域控制器需要搭建和优化协同控制平台,如软件架构、硬件架构及通信架构等。协同控制的平台需要满足高性能、高可靠和高安全等要求,以支持多个子系统的快速响应和精确执行。协同控制还需要考虑软硬件平台的兼容性、标准化和模块化等方面的特点。
(2)软件开发策略
1)底盘域控制器需要提供通用的计算和通信资源,以及标准化的软件创新平台,支持不同的功能域以及应用。
2)AutoSAR适配和定制。底盘集成运动域控制器需要遵循汽车行业的软件标准,如AutoSAR,以实现软硬件解耦和软件重用。AutoSAR是一种分层的软件架构,包括基础软件层(BSW)、运行时环境层(RTE)和应用层(ASW)。AutoSAR适配和定制是底层软件开发的重要环节,需要根据不同的硬件平台、功能需求和安全等级等进行配置、修改和优化。
3)软件测试和验证。底盘集成运动域控制器涉及车辆的动态性能、安全性和智能化水平,要求软件具有高度的稳定性和可靠性。软件测试和验证是底层软件开发的必要环节,需要进行严格的仿真、实车及场景等测试,保证软件满足功能、性能和安全等要求。
4 协同控制算法开发策略
(1)分层式底盘域协同控制架构
为了便于模块化实现,采用分层式协同控制总体架构(如图所示),其关键技术主要包括3个方:车辆运动状态感知及驾驶员意图识别;控制模式决策与子系统选择;高层控制器和控制分配功能。协同控制框架将上述三方面的功能分成5个层次。
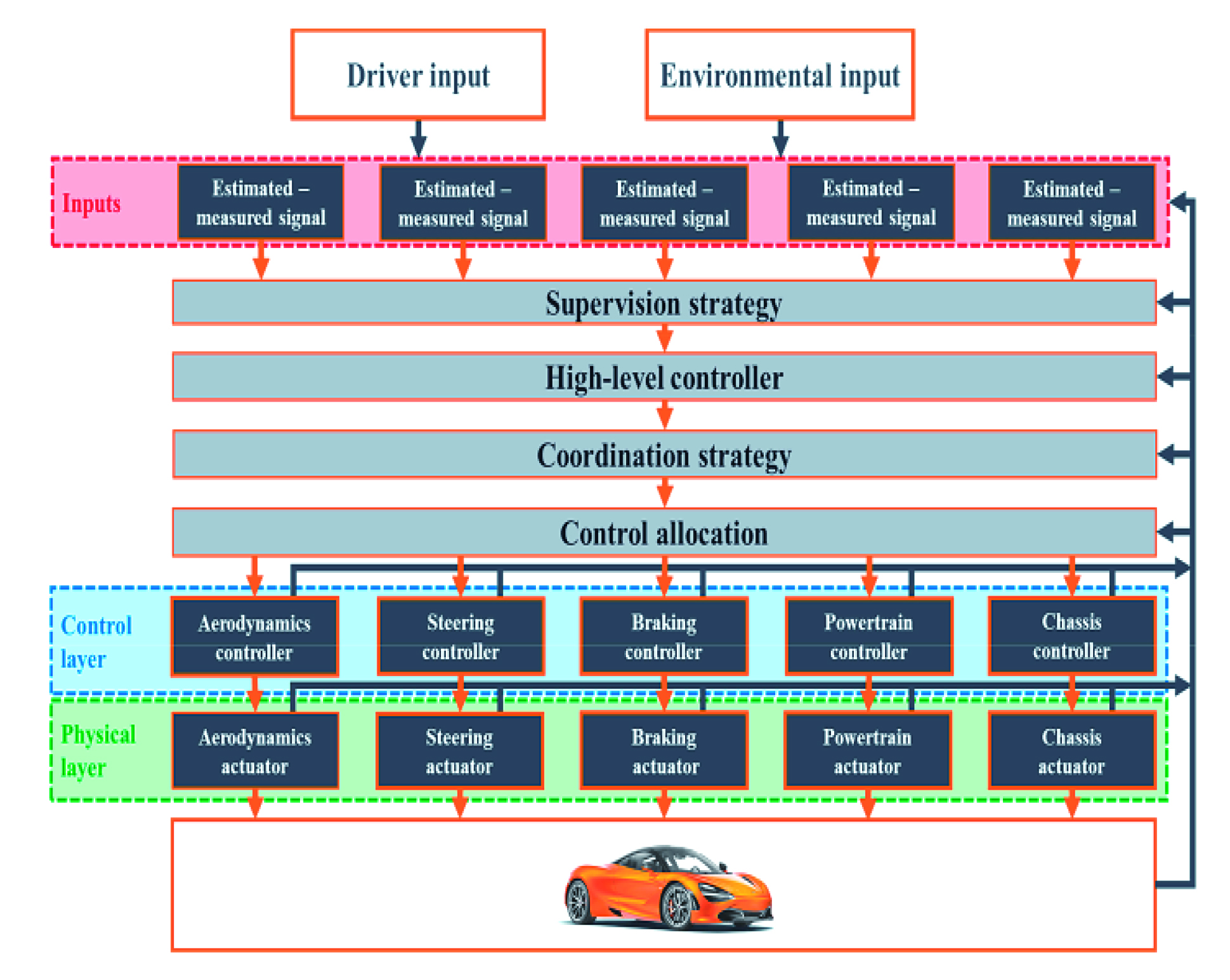
图 分层式底盘域协同控制总体架构
(2)基于强化学习的底盘域协同控制算法
车辆运动具有强耦合、非线性和不确定的特点,协同控制可以有效解决耦合问题,通过不同功能的协调避免耦合子系统之间的冲突。强化学习是一种数据驱动的最优控制方法,不需要以预设的规则或指令为基础进行操作,而是通过在真实或虚拟环境(数据)互动试错以获得奖励来自主学习最佳决策,与人类学习的方式非常类似,具有良好的环境适应性和鲁棒性。强化学习与深度神经网络技术的结合进一步提升了系统建模能力与状态表征能力,可以克服系统机理模型的不足,且具有良好的自适应能力,为应对非线性和不确定性提供了一种新的方案。本项目基于深度强化学习技术建立车辆运动状态与控制策略之间的映射关系,可以为底盘域协同控制提供统一的技术方案。
(3)基于卡尔曼滤波的协同控制状态估计算法
状态估计是车辆运动控制的基础和前提。受限于传感器的能力或成本,多数情况下,为了获得对车辆进行控制时需要的车辆状态数据,需要通过状态估计算法间接得到。该方案通过以卡尔曼滤波和数据融合为主要技术手段,对车辆运动关键状态进行估计,包括但不限于车辆运动俯仰角和侧倾角,纵向车速和质心侧偏角等。
卡尔曼滤波是一种最优的状态估计方案,可以获得最佳的估计结果。数据融合为估计算法提供更加全面和准确的数据输入,可以进一步提升估计的准确性。
5 结论
底盘域控制器具有良好的兼容性和扩展性,能够适应不同的传感器和执行器。软件设计具有接口标准可访问的特性,服务组件的部署不再依赖于特定的操作系统和编程语言,实现了组件的“软硬分离”,软硬件的升级调整不会影响到整个系统,从而提升汽车功能延展性。
传统的底盘控制功能彼此独立开发,相互之间缺乏必要的协同;每个控制功能所需的软硬件也高度集成,技术升级困难。底盘域集中控制器采用软硬件分离的平台化思想,实现可灵活更新的软件定义底盘。
参考文献
[1] 李宇峰.未来新能源汽车电动化与智能化发展方向[J].电子技术与软件工程,2018(17):136-137.
[2] 邓小木,周方圆.新能源汽车发展主要障碍与对策探究[J].汽车测试报告,2023(1):68-70.
[3] 靳万里.基于传感器解析冗余的智能汽车底盘域控制策略研究[D].长春:吉林大学,2023.
[4]玄圣夷.面向主动安全的汽车底盘行驶稳定性控制策略研究[D].长春:吉林大学,2010.
本文为“AI汽车制造业”首发,未经授权不得转载。版权所有,转载请联系小编授权(VOGEL100)。本文作者:常耀红,单位:安徽江淮汽车集团股份有限公司。责任编辑龚淑娟,责任较对何发。本文转载请注明来源:AI汽车制造业
AI汽车制造业
龚淑娟
李峥
热点文章
-

直播预约 | 尺寸偏差、缺陷遗漏、反复整改?从试制到量产,如何从容应对车身质量挑战
2026-07-31
-

直播预约 | EINES-AI视觉赋能整车制造:焊装到总装的质量控制
2026-08-04
-

某间接式热泵架构电驱低温余热利用控制方法的仿真优化研究
2026-08-04
-

电动汽车分布式牵引力控制功能开发与优化研究
2026-08-03
-

德国马牌携手品牌大使尹正,共塑“无惧湿滑”的驾控安全新标杆
2026-07-30
-

奇瑞尹同跃:2000万辆以后,我们不再参加内卷
2026-07-28
-

质量为源:APIS助力中国汽车高质量发展
2026-07-30





评论
加载更多