某纯电动物流车的NVH优化
0 前言
目前在2.5~3.5t纯电动物流车中,普遍采用的是后置后桥集成驱动方案配合板簧减振,集成的后桥是自带差速减速器集成,通过桥包行星齿轮组合,总成装配,再与驱动电机集成构成驱动桥系统,由于这类驱动后桥相比乘用车半轴减振方案差异较大,往往给驾驶舒适性及主观评价等带来一系列问题,在这类产品中,基于上述集成桥及关联系统本身因素,同时,早期很多从燃油车低速桥技术改制而成,一般实际有效转速不超过7500r/min,且很多集成桥正反齿设计存在差异、加工制造精度和处理技术不同等,导致性能明显低于变速器的半轴系统设计。
本文基于上述后桥集成桥方案应用在质保路试过程中,出现低速抖动、打齿和异响等问题,影响到NVH的特性,通过对问题的描述、分析并对问题进行策略优化处理,改善优化了主观驾驶状态评价,同时提高了驾驶舒适性体验。
我公司目前在售的主流纯电动物流车中,主要有远程、瑞驰和开瑞,其中瑞驰车型定位是一款微型和中型2.5~3.5t区间内城市物流车,最大载货一般不超过1t,也是采用后置后驱集成桥方案。这类车辆特点是低速大转矩,最高车速普遍在70~90km/h区间,匹配板簧结构,在追求经济性的条件下,没有隔声或声学包。
总的来说,相比较一般同功率等级乘用车变速器和半轴方案来说,物流车的NVH品质表现在低速起步及加速噪声、啸叫等方面明显体验较差,制动能量回收舒适度较差,也有机械、阶次特性等共性问题。
本文基于后驱集成桥方案搭载应用纯电动物流车,进行质保路试评价出现主观低速抖动、打齿和异响等NVH方案评价项目,如正常行驶后进行滑行,在达到一定车速如20km/h以下时,车辆存在连续性周期性抖动、异响。
另外,在工况行驶中,蠕行行驶时,在一定的转速下,存在抖动现象,通过对其工作工况及整车的测试定位分析,对控制策略进行优化分析,整车测试验证效果提升较大,满足质保路试评价验收。
1 低速打齿特性及原理分析
NVH中的N是Noise的缩写,代表噪声方面的性能指标评价,通过车辆内部、外部、台架近场和远场等维度进行对人耳能感知的不舒服的主观评价考核,在考核前,会通过整车目标分解到台架进行测试(如WOT和电机阶次),10cm近场100%转矩对应转速如下:500、2000、6000及7500r/min。
其中,WOT和电机阶次噪声与总体噪声差值>10dB(A),整车级噪声要求在500~7500r/min下,DRE阶次≤45dB(A),PWM控制器基波噪声(整车)<60dB(A)。
同时,根据国标GB/T10069.1-2006,在室温下的半消声室进行测试距离为0.5m,在电机的前、后、左、右和上5个方向,布点5个传感器,通过测试电机空载和负载工况覆盖全转速,进行测试摸底,然后再进行上述整车测试。
本文通过在电机及周边布置传感器进行测试并进行数据和报文采集,根据载频策略控制进行振源考核,考核驱动电机系统噪声性能要求,分析噪声来源点可能如下:
(1)连接结构上,行星齿轮正反齿啮合时,导致正反转复发运行,存在机械耦合伴随转矩施加导致噪声。
(2)电机轴与桥包内减速器匹配端面耦合,根据文献[1]存在公差,在交变的转矩作用下,随着径向力作用,齿槽转矩影响,运动方向发生变化,导致载频切换时定子产生共振,传递噪声急剧增加。
(3)径向力作用与驱动电机内部结构,通过齿槽转矩及气隙气场谐波影响到径向力输出作用。
在本次纯电动物流车质保路试车辆测试评价中,基于后驱集成桥方案,驱动电机通过端面与集成桥共端面,通过螺栓连接,驱动电机也通过支架板进行后端面与后桥连接。
板簧的振动伴随不同工况下,极易形成抖动、异响共振等,主要体现在如下方面:
(1)松加速踏板时,车辆从电动状态切换至发电状态,电机出力由驱动力变为制动力,如图1所示,左边小齿轮由主动轮变为从动轮,齿轮啮合面发生变化,由电机端齿轮下面啮合变为上面啮合,此时啮合力处理不好的情况下(如控制精度、速度、周期及齿轮制造精度等),会出现打齿问题。
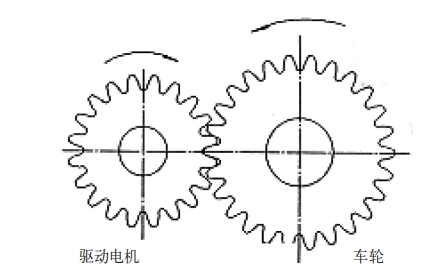
图1 行星齿轮的啮合
(2)低速滑行至快退出回馈时,滑行回馈产生的电磁阻转矩在逐渐减小,而且电机侧阻力矩无法有效抑制车轮传输过来的动力矩,导致出现周期性往返敲齿现象。
(3)车辆存在共振,在低速几百转时,转速出现波动,波动范围≥20r/min,根据经验,如果转速在波动20r/min以上会造成驾驶抖动感觉。
(4)整车控制器在松制动后给定回馈指令力矩时,有时缺乏对整车传动系统间隙和实际工况的考虑,导致电机控制器(MCU)完全按照指令力矩输出时,车辆会出现打齿、抖动现象。
依据麦克斯韦张量法,径向电磁力作用时是可以通过公式进行描述的,通过公式研究分析磁场角度影响受力输出,根据文献[2],有如下公式:

式中,θ1为磁场空间角度;u1为定值磁导率;B为磁通密度。
在不同的转速下,实际应用的载频不同,应用随机载频控制,根据文献[3~4],在磁场不同的位置角和气隙空间角度时,载频调制对谐波有一定的影响,可产生转矩波动,谐波电流,噪声啸叫。
根据文献[5~6]对径向力的研究可知,对应于设计存在48槽电机结构,可对8和16阶数作用产生一定的频率的分倍数,且与其频率关联如2倍和4倍等。
如果驱动电机在极对数P=4,48槽,径向电磁力可通过定子槽产生转矩、不同载荷状态下影响到气隙磁场激励产生,对载频存在分倍影响,根据文献[5],其电磁转矩Te、径向力瞬时值Rmp有如下表达:
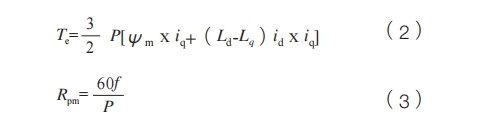
式中,P为极对数;Ψm为磁链;iq、id、Lq、Ld分别为q和d 轴的电流和电感;f 为电流频率。
根据文献[6],有如下公式:

式中,ρ(θ1,T1)为定子磁场上单位面积径向力密度;B(θ1,T1)为磁密与空间角度;u1为磁导率;Bρ为转子磁通磁密;Bs为定子磁通磁密。
因此,结合上面公式(1)、(2)、(3)可知,在驱动负载变化下,随机载频调节影响到输出电流和转矩波动,根据文献[7],径向电磁力会与极对数有关联同时影响到电流频率,产生因控制转矩问题存在转矩波动、转速波动,而导致抖动、异响等现象。如图2所示,报文波形中,从上往下依次为电机输出转矩、转速和三相电流,可以看出转速有波动,对应转矩微小波动,然后波动较大,但对应路谱工况是普通清洁路面。
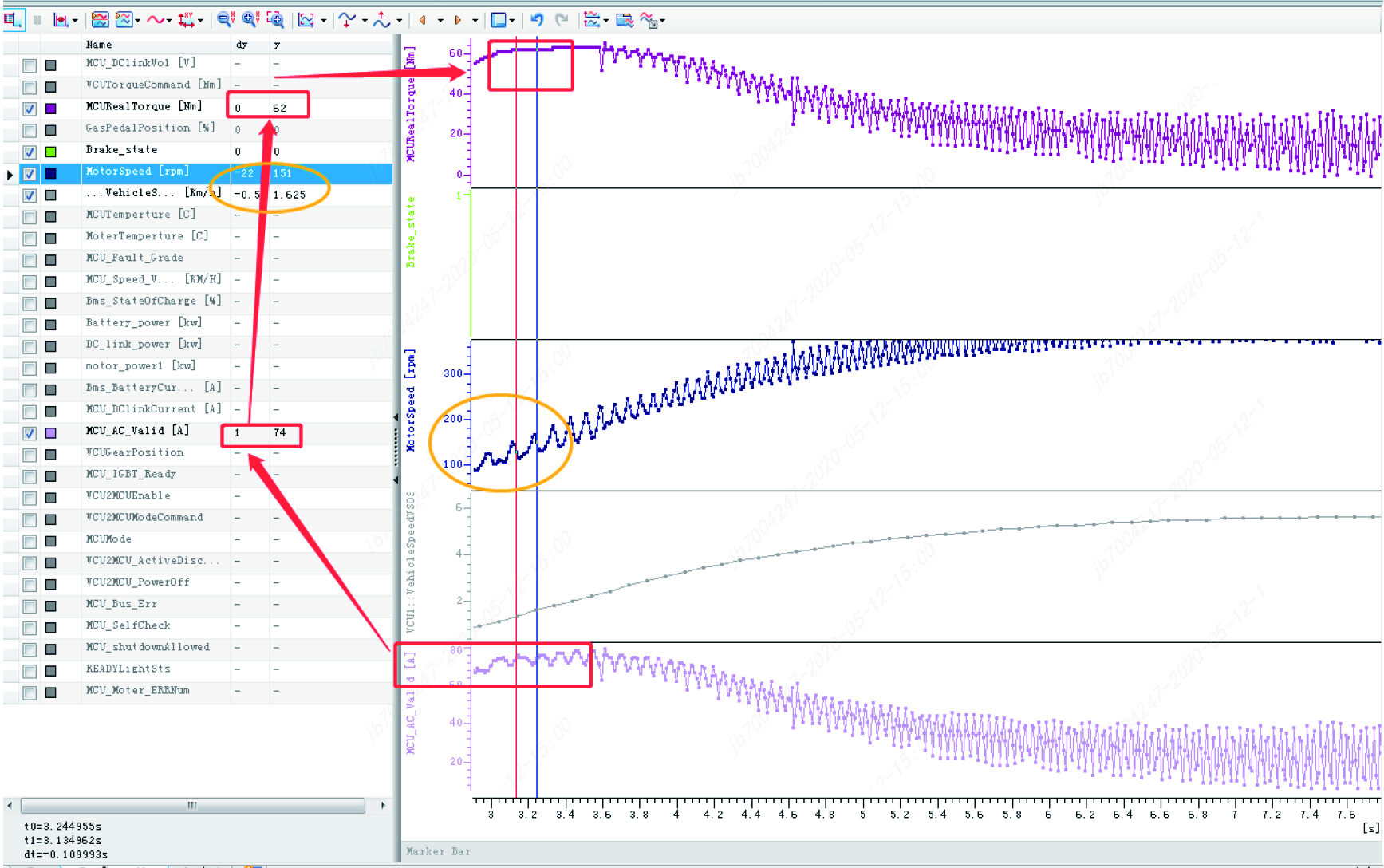
图2 转矩波动
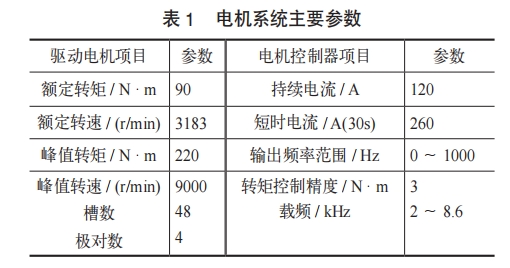
本文讨论的驱动系统主要参数见表1。
2 抖动异响故障分析
驱动系统主要表现:
(1)在低速行驶工况中,进行滑行,当低速滑行至12km/h时,车辆有连续性周期性抖动、异响。
(2)低于一定的转速(如1000r/min)左右开始松加速踏板时,存在抖动打齿现象。
图3是转速为967r/min、车速13km/h时松加速踏板至退出滑行的波形信息,图中红色为转速,淡蓝色为整车控制器(VCU)请求目标转矩,绿色为电机控制器输出转矩。
MCU输出给定可以完好跟随VCU给定,VCU转矩给定无波动。
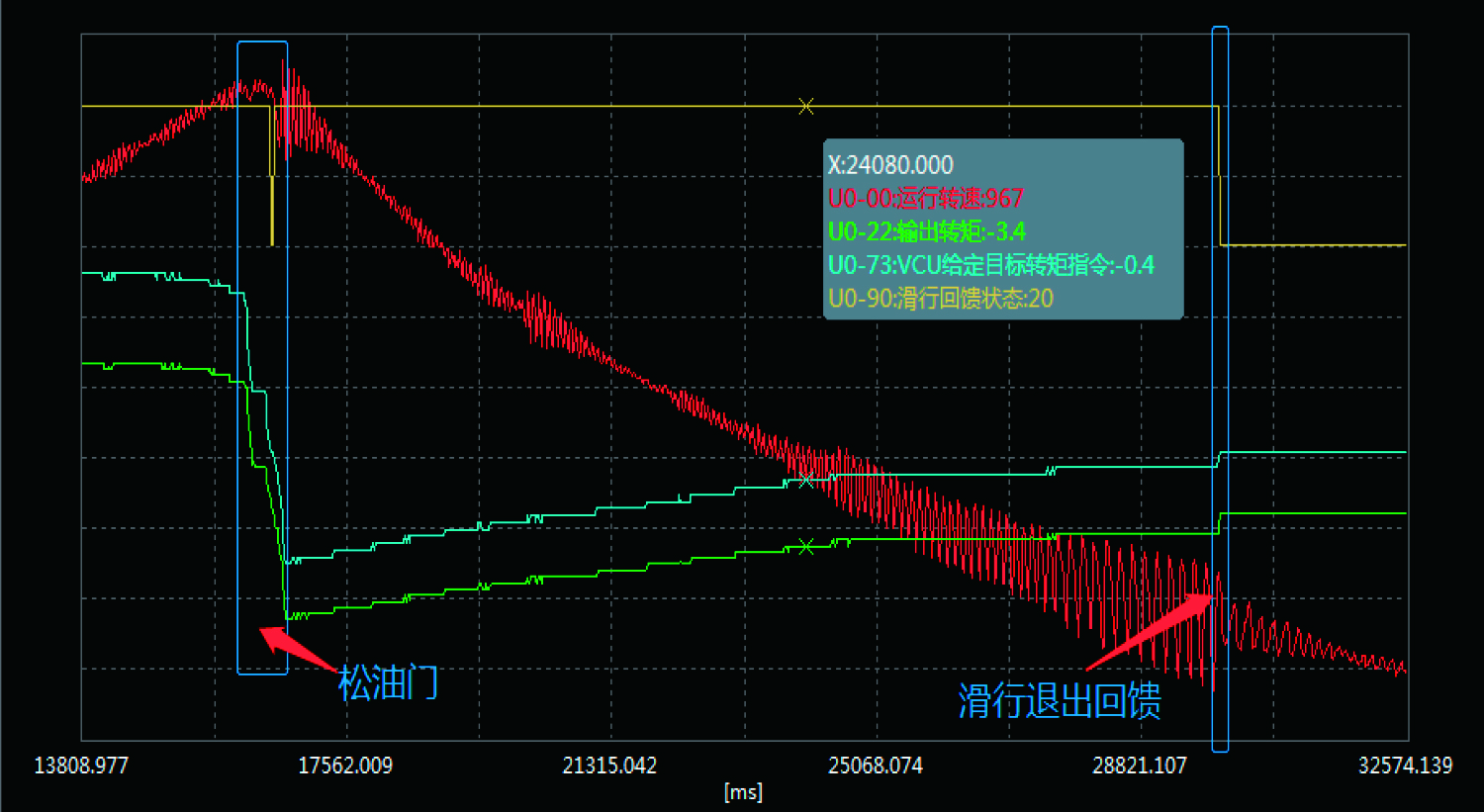
图3 抖动测试报文
(3)松加速踏板转矩剧变时,转速有短时抖动,并伴有打齿声,随着回馈转矩的平稳输出,转速波动逐渐减弱。
(4)退出回馈前有一段较长时间转速周期性波动,退出回馈后转速波动幅值明显减弱,无打齿现象。
(5)传感器采集到的低频阶次频率几十到几百转,有2、4、8阶,如图4所示。
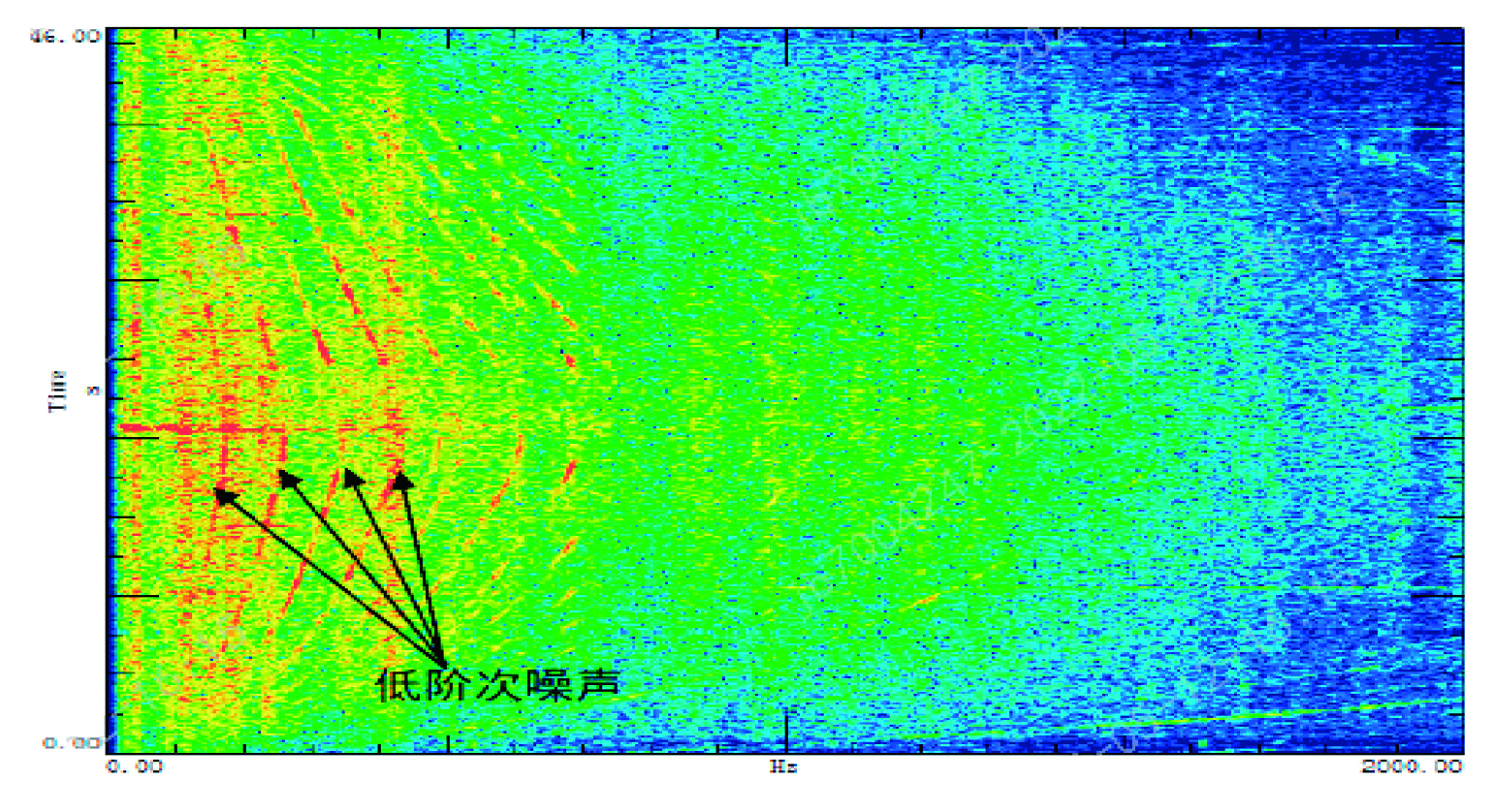
图4 传感器采集的瀑布图
3 控制策略仿真及优化
针对传感器采集测试获得的瀑布图及CAN通信报文的解析数据来看,重点针对低速和滑行进行控制策略分析,对驱动电机控制器与驱动电机的匹配转矩控制进行一定的预转矩、主动阻尼、步长优化和载频分段优化,并通过对齿轮啮合的状态进行VCU转矩和驱动电机控制器转矩响应的提前给力,再逐步过渡啮合,达到平滑过渡滤波优化效果。
3.1 预转矩
针对松加速踏板时正负转矩切换导致打齿问题,可通过调节预转矩加载参数,来使切换平滑,参数控制调整见表2。T1是在整车进入发电模式下,制动预转矩起始值,制动状态下的预转矩初始值(最小值)。T2是在整车进入发电模式下,制动预转矩终止值,制动预转矩的最大值,制动预转矩由T1增加到T2。T3是预转矩加载时间,即T1到T2,一般情况下,加载时间越长对抖动的改善越明显(转矩平滑),但是时间过长影响加速性能。T4是正常响应VCU转矩加载步长,按照在上一拍的基础上增加T4逼近需求转矩。
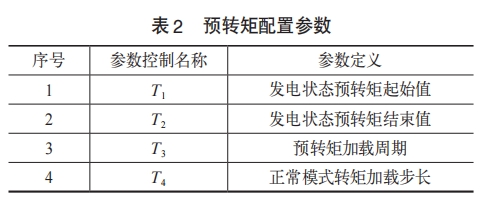
调整预转矩参数值,尝试慢慢加大标定,优化调整改为T1=3N·m,T2=3.4N·m;T3加载时间由100ms加到150ms,随之T4加载步长由一拍(2ms)增加,修改为3ms。
3.2 主动阻尼
针对此类低速抖动,常用的应对措施一般采用预转矩补偿策略。该策略具有一定的效果,但是单独使用会影响系统的响应性能,通用性需要完善,采用配合主动阻尼功能策略解决该类机械抖动问题较为理想。电机抖动会引起噪声,降低乘坐舒适感,主动阻尼功能策略能够削弱由机械、路谱等外部原因导致的低速抖动问题。
汽车传动系统存在典型的柔性连接,同时车辆的惯量又远大于电机本身的惯量,电动汽车应用(特别是直驱方案)比较容易出现谐振问题。谐振常常出现在电机加减速过程中,踩下加速踏板或者驻车制动瞬间,电机转矩指令往往会阶跃变化,此时电机输出转速将会出现不同程度的波动。
阻尼过小是导致传动系统谐振的一个原因,可以通过增大阻尼来改善转动系统谐振,阻尼对速度做出反应,阻碍速度变化,可以看作是基于速度的负反馈。主动阻尼是一种实用方案,仿真模型如图5、图6所示,基于MATLABSimulink策略仿真。
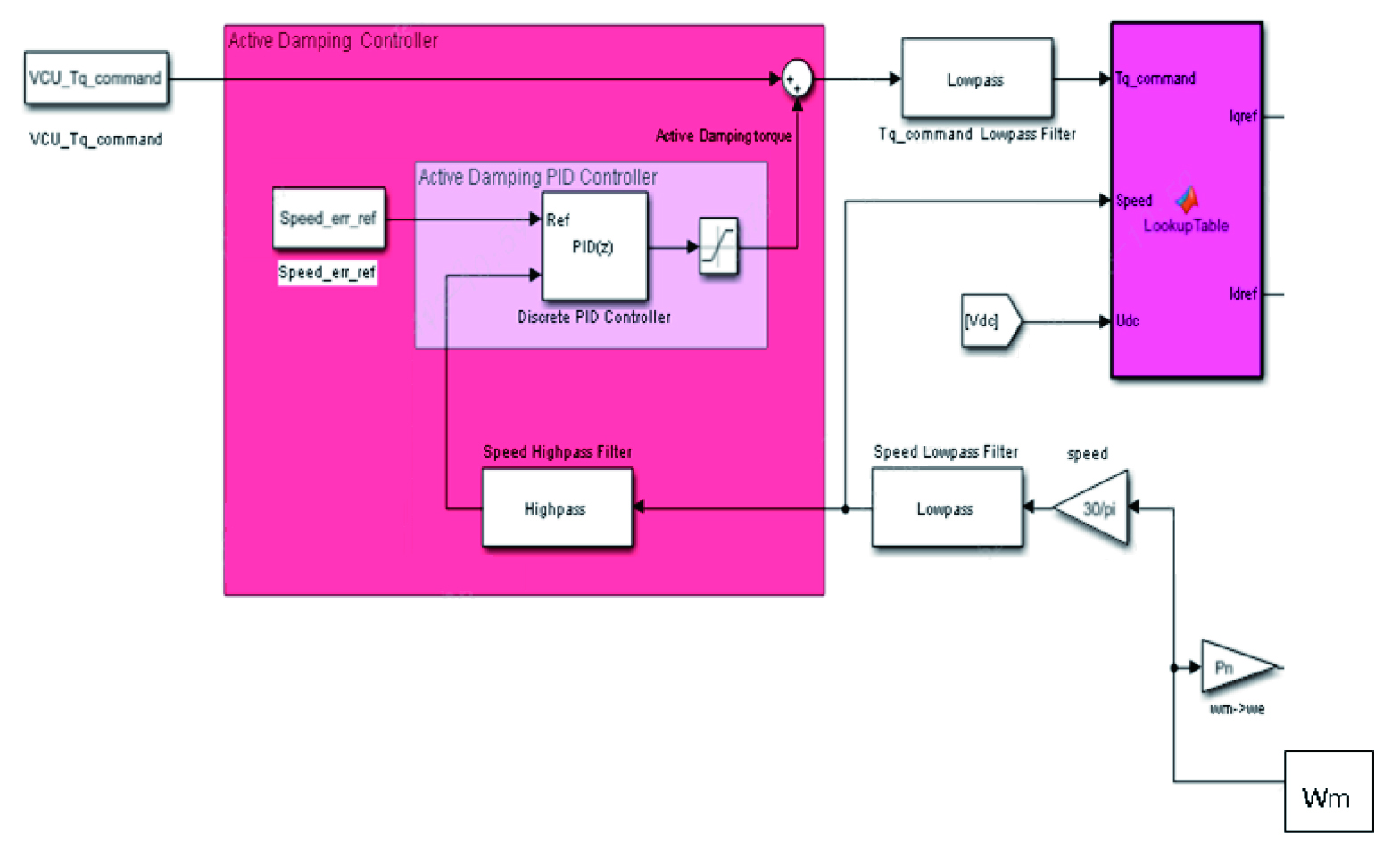
图5 主动阻尼仿真模型(一)
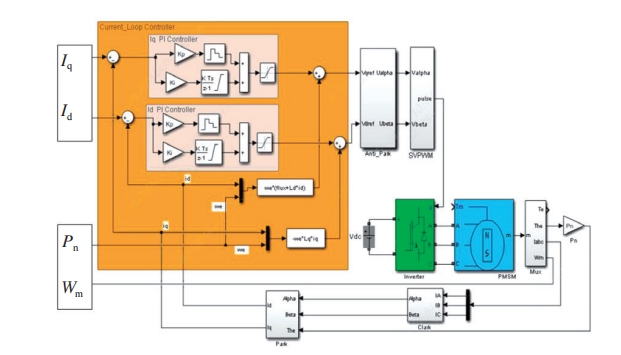
图6 主动阻尼仿真模型(二)
将经过低通滤波过后的电机实际转速信号,送入高通滤波器(fstop、fp根据整车测试数据标定),提取电机实际转速中的抖动成分,然后将速度抖动分量与速度抖动参考值Speed_err_ref(例如:速度抖动分量目标为0r/min)的差值送入主动阻尼PID调节器中(Kp、Ki、Kd需标定),PID控制器的输出值ActiveDampingtorque可以看作是防抖转矩,将此转矩值与VCU的请求转矩叠加,再经过低通滤波器(滤波器参数需标定)滤除转矩命令中的干扰等信号,然后按照正常的电机电流控制环路控制电机转矩输出。
针对退出滑行回馈前周期性转速波动问题,在配合预转矩策略基础上,通过增加主动阻尼功能来处理,主动阻尼开启后,能够跟随转速波动,当转速波动超过阈值进行提取并进行50r/min时触发主动阻尼功能,产生一个反向的补偿力矩,来抑制转速波动,如图7所示,主动阻尼参数配置见表3。
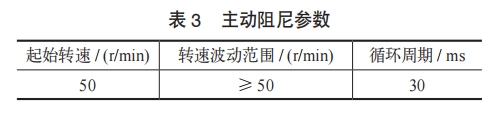
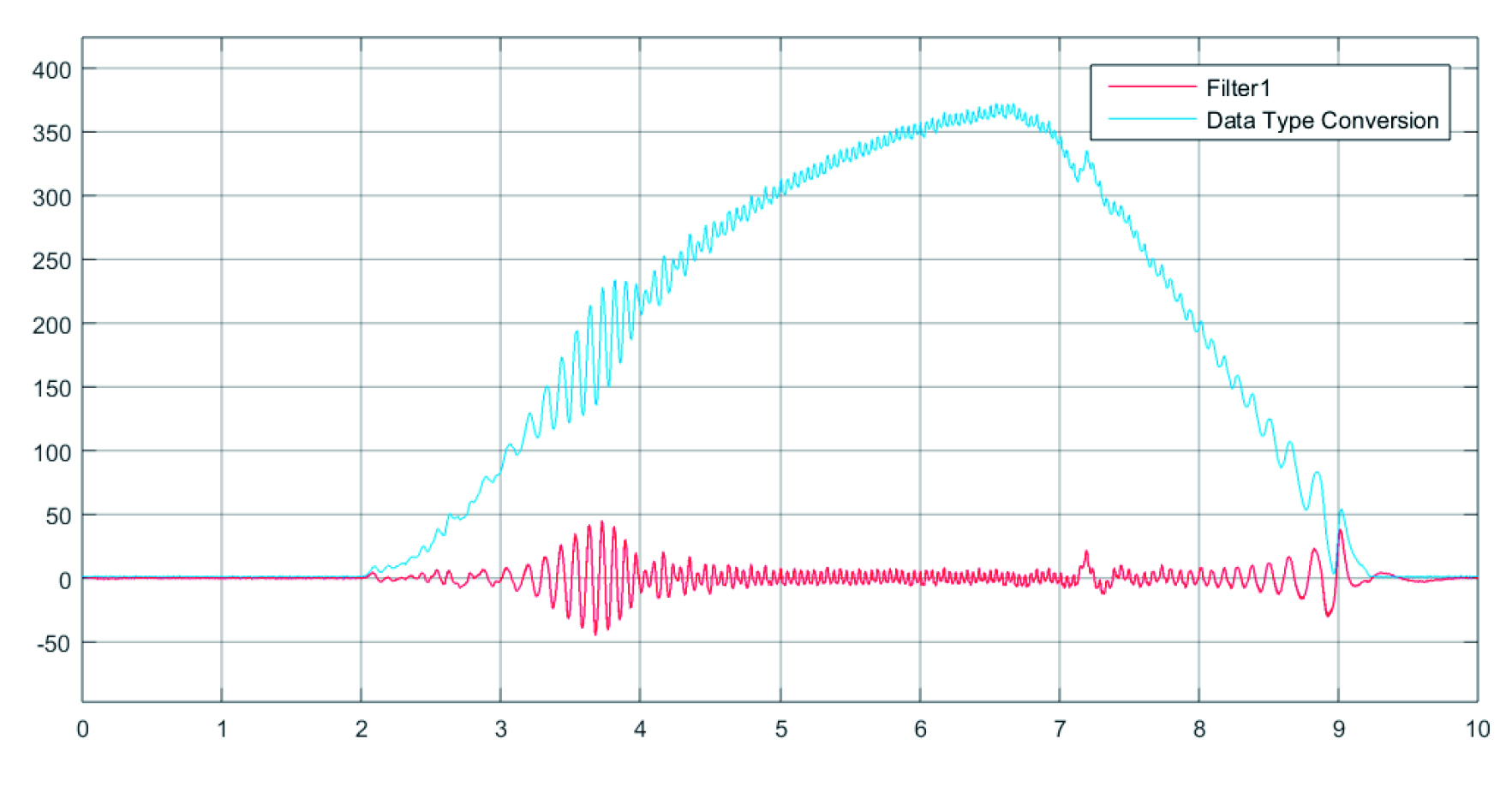
图7 转速波动提取
3.3 载频控制
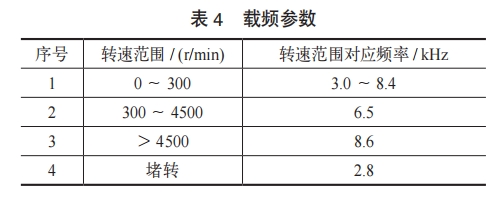
根据载频优化,低速起步至蠕行工况下控制频率实现动态调节,在3~8.4kHz间调节,根据负载载荷实现自动调节,结合径向力影响对位置角度影响,通过采集旋变角度位置实现调节匹配,减少了动态行车抖动,对载频匹配路谱进行标定,分散频率分布,减少共振影响,载频参数见表4。
结合VCU请求的转矩指令后,MCU在满足转矩指令限值时,对其加载的曲线进行优化,分成两个步骤:第一步,跟随旋变转速,达到模式条件要求时,进入主动阻尼模式;第二步,进入模式后,通过有源阻尼控制实施补偿转速进PI处理,将处理结果作为给定转矩条件,叠加在需求转矩上,并起动滤波器对谐波电流进行吸收抑制。
谐波共振分量,实施转矩控制形成反向转矩抑制转矩波动对电机转速的控制,达到整车抑制抖动效果。进入条件:转速达到50r/min(根据标定),周期30ms,转速误差:±50r/min。退出条件:不能自行退出,需通过软件屏蔽主动阻尼功能或改变主动阻尼起始转速及范围。MCU检测到周期性转速波动时,判断比较转速波动模型,包含转速的范围和周期,如果转速波动达到预先设定的限值20r/min且周期也满足时,即可触发主动阻尼模式;然后首先实施有源阻尼控制,生成补偿转速PI控制处理后叠加到参考转矩上,然后实施转矩控制,滤波器对谐波电流消除异常转矩成分达到平滑处理,并在需求的转矩上实施补偿转矩,增加系统阻尼效应,产生一个反向补偿转矩调节输出抑制扭矩波动,达到对电机输出转速进行抑制的作用。
4 测试验证
两种控制策略存在差异,具体如图8和图9所示。在图8中,右上方代号表示绿色为工作模式,当前为滑行,灰色为转速,当前为919r/min,粉色为VCU目标转矩请求,最下方灰白色为MCU输出预转矩,施加过后并结合表4策略优化控制,进行整车路试测试报文解析数据,图9相对于图8来说,转速波动非常小,实车驾驶感知效果得到了改善提升。
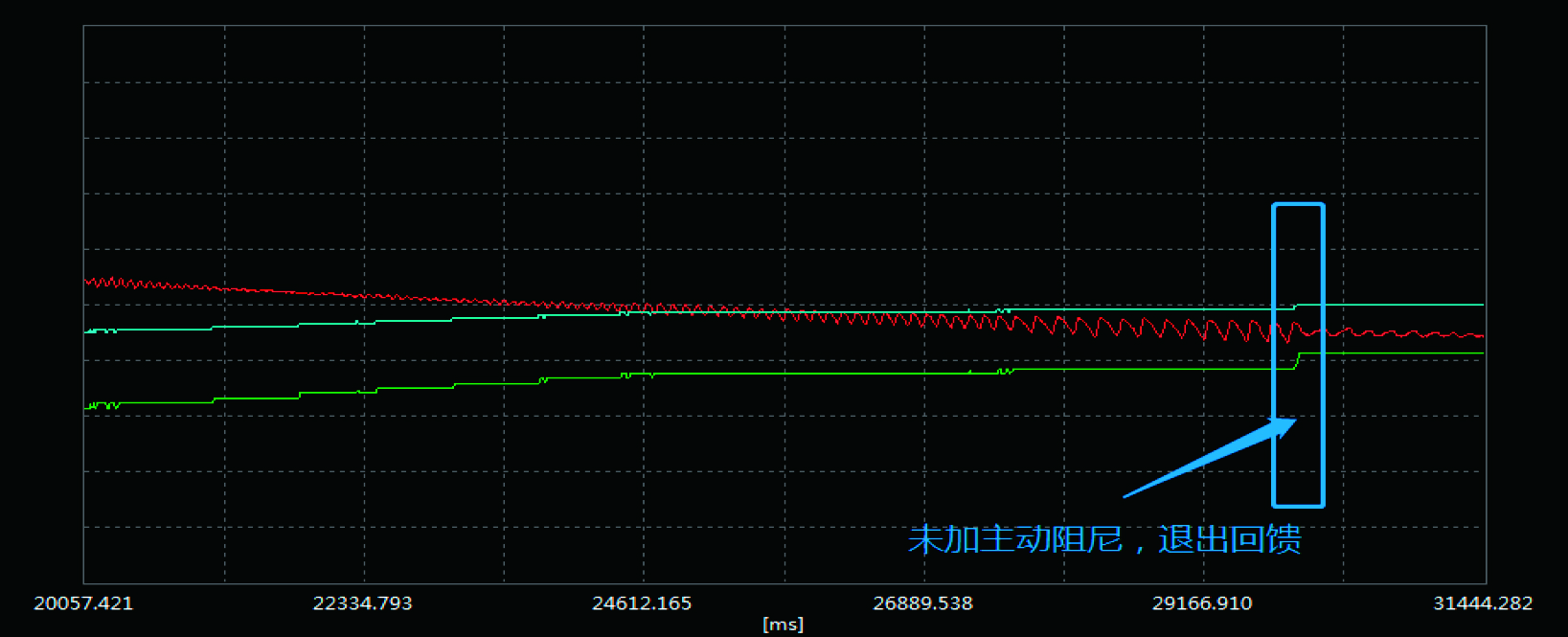
图8 报文数据(未优化前)
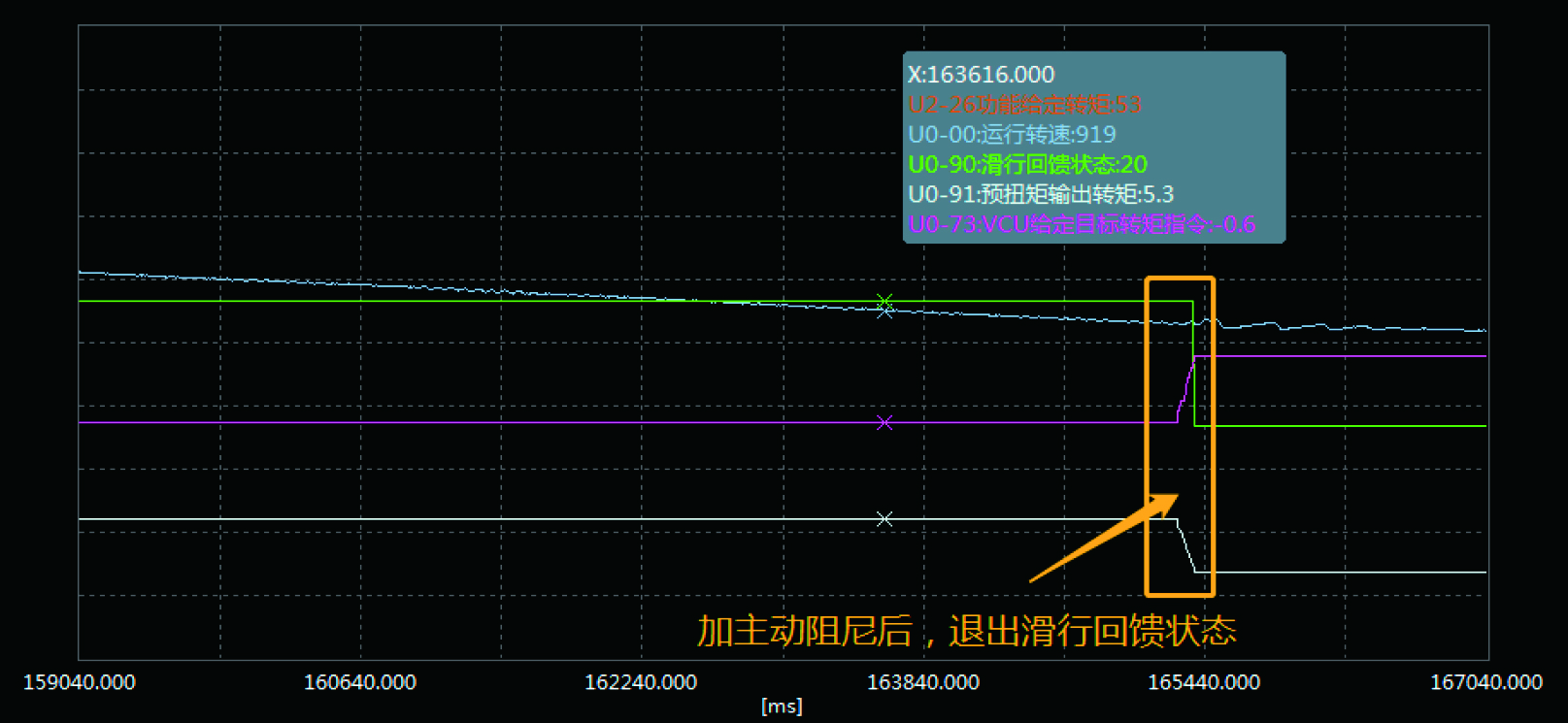
图9 策略报文数据(优化后)
5 结论
通过对纯电动物流车搭载的后驱集成桥配合板簧方案进行质保路试中测试评价应用带来的低速抖动、异响和滑行回收抖动设计等问题,通过对整车布置传感器进行测试、报文及瀑布图等数据分析,依据理论分析定位,开展对控制策略优化设计,通过采取预转矩、主动阻尼并结合变载频分段策略实施,提升了主观驾评效果,缩短了质保路试验证周期,降低了整车开发成本。
参考文献
[1] 陈茜兵,程仁恒,陈龙岗,等.一种A00纯电动驱动集成桥系统的NVH优化[J].汽车零部件,2023.02(02):75-80.
[2] 林巨广,马登政.电动汽车三合一驱动系统振动噪声分析与优化[J].汽车技术,2021(03):20-25.
[3] 林立,黄苏融.永磁同步电机系统线性化H∞鲁棒控制[J].电机与控制学报,2009.13(04).
[4] 赵朝会,李遂亮,王新戚,等.永磁同步电机气隙磁密影响因数的分析[J].河南农业大学学报,2005(03):338-344.
[5] 王成元.现代电机控制技术[M].北京:机械工业出版社,2006.
[6] 李晓华,刘成健,梅柏杉,等.电动汽车IPMSM宽范围调速振动噪声源分析[J].中国电机工程学报,2018(17):5219-5227.
[7]王玉娟,王华强.转子分段斜极永磁同步电机电磁振动噪声研究[J].电气传动,2021.51(02):75-80.
本文为“AI汽车制造业”首发,未经授权不得转载。版权所有,转载请联系小编授权(VOGEL100)。本文作者:陈茜兵 高东洋 王栋,单位:芜湖泰瑞汽车有限公司。责任编辑龚淑娟,责任较对何发。本文转载请注明来源:AI汽车制造业
AI汽车制造业
龚淑娟
李峥
热点文章
-

智能汽车场景化开发:系统融合与 用户体验的协同研究
2026-07-20
-

“泰钽”来了!开启智能越野3.0时代
2026-07-22
-

基于传动效率的多模复合功率分流混合动力系统模式控制研究
2026-07-21
-

乘用车混合动力总成系统设计和性能仿真研究
2026-07-22
-

动力系统主导车市质变,增程器迈入系统竞争
2026-07-23
-

基于深度学习的电驱实验系统设计
2026-07-24
-

-
基于深度学习的电驱实验系统设计
针对传统永磁同步电机建模方法难以兼顾精度与实时性的问题,本文基于深度学习技术提出一种融合物理约束的永磁同步电机降阶模型,通过深度神经网络实现对电机非线性电磁特性的精细化建模。围绕所提降阶模型,搭建了电驱实验系统,并将该模型集成至电驱系统中,实现了实时硬件在环验证。在不同工况下对降阶模型和传统dq轴解析模型开展实验分析,结果表明,所提出的基于深度学习的永磁同步电机降阶模型在保证高精度建模的同时,实现了更好的动态性能。该模型支撑的实验系统可用于电驱系统的快速仿真与控制算法研究,具有良好的工程应用前景。
作者:
-
动力系统主导车市质变,增程器迈入系统竞争
-
“泰钽”来了!开启智能越野3.0时代
-
乘用车混合动力总成系统设计和性能仿真研究
-
基于传动效率的多模复合功率分流混合动力系统模式控制研究
-
智能汽车场景化开发:系统融合与 用户体验的协同研究





评论
加载更多