光学动作捕捉在汽车人机工程虚拟评审中的应用
0 引言
运动捕捉技术在医疗体育、军事运动、影视动画等行业的应用越来越普遍,武汉体育学院何天宇等人梳理了各类运动捕捉技术在体育运动中的应用,上海市工艺美术学校郭正奕梳理了各类运动捕捉技术在影视戏曲中的应用。由于光学动作捕捉的精准性优势,基于光学动作捕捉进行目标实时动作跟踪的研究越来越多,尤其是光学全身动作捕捉在人体动作领域有着广泛的应用。意大利卡拉布里亚大学FabioBruno等人利用光学动作捕捉技术及全身动作捕捉开展装配作业人员装配过程中人类工效研究,分析人体腰椎的受力情况,从而优化装配人员的操作姿态,减少疲劳。
由于汽车人机工程开发空间及沉浸度等要求,且全身动作捕捉在虚拟环境中提供了一个良好的身体边界感,在人机工程的评审方面起到了至关重要的作用。因此利用光学全身动作捕捉与虚拟现实技术结合,可以进行沉浸式空间的评审。奇瑞公司针对光学动作捕捉在人机工程评审中的应用,创新性地进行优化及适应性开发,从而满足汽车人机工程开发需求。
1 光学动作捕捉
(1)光学动作捕捉原理
光学动作捕捉是一种用于实时跟踪和捕获目标动作,并实时获取目标6自由度信息的系统。光学动作捕捉系统由定位相机及跟踪目标上的光学反光标记点(marker)组成,原理如图1所示。
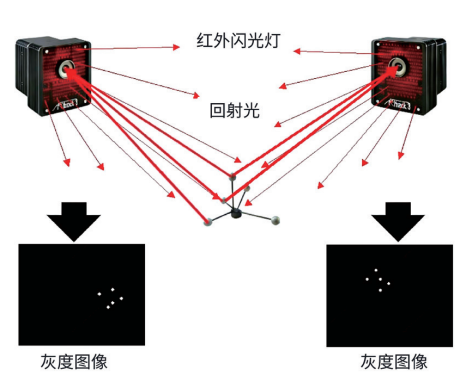
图1 光学动作捕捉系统原理示意
(2)光学动作捕捉选型
ART TRACK、Opti Track和Vicon三个光学动作捕捉品牌在技术上较为成熟,且行业应用均较为广泛。每个品牌均有多款摄像头(镜头)适配不同场景,在定位精度、延时性、视场角识别范围方面各有优劣。普遍的定位精度为0.1~0.5mm,延时性在5~20ms之间。但定位精度受相机分布、相机数量和场景振动等因素的影响。上海交通大学罗豪龙等人详细测试了相机分布、相机数量和场景振动等因素对空间定位精度的影响,相机分布不均匀、数量少会导致光学动作捕捉系统的实际定位精度严重降低的情况。中国人民解放军信息工程大学王俊威等人分析了帧率、曝光时间、灰度阈值和红外LED亮度四个系统参数的取值与Opti Track系统测量精度的关系,得出了实验环境下四个参数对测量精度的影响规律。
从成本、主动标记点识别及与汽车虚拟评审软件数据实时交互等方面考虑,本研究系统选用ART动作捕捉系统进行虚拟评审的动作捕捉数据输入。本文研究系统选用ART DTRACK5摄像头及ART-Finger主动光学手套。DTRACK5系列具有捕获范围大、捕获标记点数量多及延迟低等特点。同时为保证动作捕捉识别效果及稳定性及精度考量,根据多轮测试选定动作捕捉的应用空间范围:长×宽×高为8m×6m×2.5m。刚体定位精度≤1mm。ART系统组成,如图2所示。
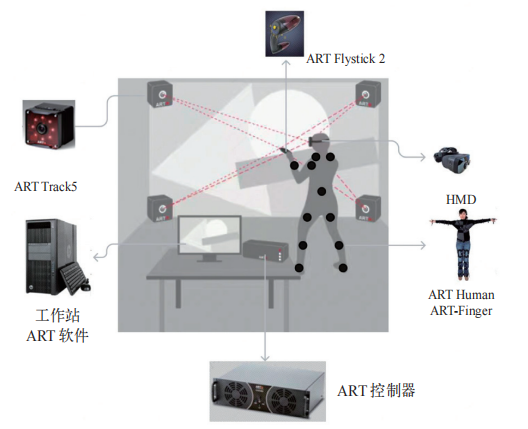
图2 ART系统组成示意
2 ART光学动作捕捉应用方法
ART软件操作界面如图3所示,ART系统使用需经过房间校准、坐标系变换和全身动捕校准等步骤。

图3 ART软件操作界面
(1)房间校准方法
在确定DTRACK5的布置位置后,固定相机位置不动。采用L形校准尺与T形杆共同进行校准,校准过程需清除干扰点。使用L形校准尺的校准需将L形校准尺尽量放在场地中心,但如果场地中心由于设备占据的原因不方便放置时,需要将标尺放置在尽可能多的摄像头捕捉的位置处。以柔性台架设备为例,摄像头中心区域被台架占据,需要进行反复测试,找到合理的位置进行摆放。如L形校准尺未放置在地面上校准,需要进行房间高度调整,保证水平面与地面重合。值得注意的是:在进行房间校准时,L形校准尺的角度需保持0度。L形校准尺与T形杆如图4所示。

图4 ART校准尺示意
(2)坐标系变换方法
校准房间后需在台架上通过单个标记球进行台架上3个基准特征点测量,测量值与设计值经过刚体变换(平移+旋转)得到拟合的平移及旋转向量值后,在虚拟评审软件中进行调整,如图5所示。刚体变换应用较为广泛,是机器人、计算机视觉和图形学等领域的基础工具。针对本文具体表达是设台架某一基准点P在动作捕捉中坐标系A中的坐标为[x',y',z']T,在Caita坐标系B中的坐标为[x',y',z']T。则刚体变换关系为:
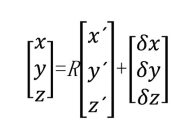
式中,R为旋转矩阵。
最终得到坐标系转换的三个平移及三个旋转值。将六个对应值在虚拟现实软件中进行设置后,由此实现动作捕捉系统坐标系与虚拟软件中坐标系一致的情况。在虚拟现实软件Techviz软件中的设置如图5所示。具体为“Model adjustment”模块下的“Relocation”中进行调整。
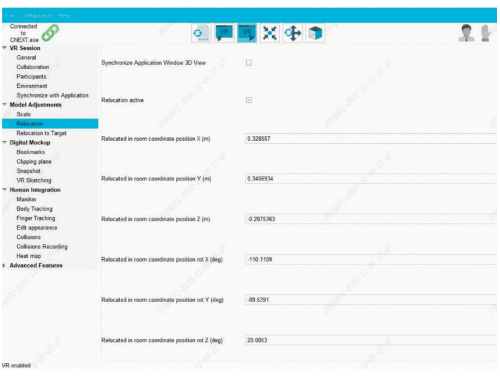
图5 ART校准尺示意
(3)全身动作捕捉
动作捕捉坐标系匹配后,进行ART全身动作捕捉(以下简称:ART-Human)校准。ART-Human的全身动作捕捉由17个标记刚体构成,如图6所示。校准过程:被校准人员应穿戴全身动捕套装,在摄像头可见区域内,保持T形姿态,等待倒计时结束或者直接点击“start”后,随意做各种关节弯曲的动作,等待校准进度100%后,即可完成校准。校准完后,单击Tracking,窗口中ART-Human的完整的逆向动力学的骨骼模型表明校准成功,如图7所示。

图6 ART-Human校准示意
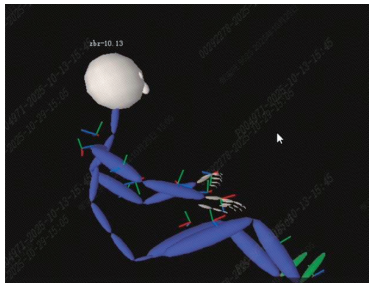
图7 ART-Human骨骼模型示意
3 ART-Human虚拟效果
通过ART-Human校准过程实现自动的骨长校准。ART-Human通过接口将骨骼位置数据传递到虚拟软件(如Techviz)对应的骨骼模型节点中,虚拟软件骨骼模型联动蒙皮皮肤模型,从而实现真实与虚拟中的同步实时运动。根据ART-Human进行头部、肩部、肘部、臀部、腿部、膝部和脚部空间评审。Techviz中观察实时虚拟人状态,如图8所示。
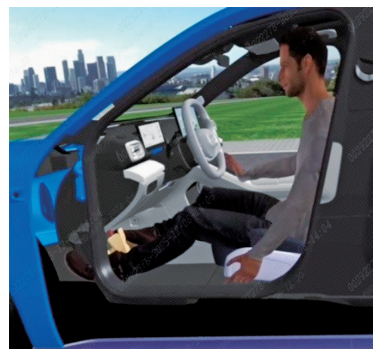
图8 Techviz中实时全身动捕示意
4 全身动捕适应性开发
但由于ART-Human在维度方向上无法精准匹配真实人体,在关节位置及头顶位置上同样存在偏差,偏差约10~20mm,此种情况无法满足汽车人机工程开发的精度,且无法针对身体与周边空间进行测量。针对此情况进行自定义模型刚体的开发。奇瑞公司创新性地开发头模型、膝盖模型和脚尖模型。联合ART手套模型ART-Finger使用后可精准感知内部空间。且在模型上增加标尺,可以进行实时的空间距离的测量。开发模型如图9所示。

图9 ART全身动作捕捉开发示意
针对上述不规则模型,在虚拟评审Techviz中的虚实联动的开发方法如下。
(1)制作真实模型,在模型上粘贴/安装marker球,以5个marker球为例。并将真实模型通过实物扫描后创建出扫描模型,存成Catia格式part文件A。
(2)对刚体进行校准。校准完成后,获取刚体上反光球的位置坐标(ART Dtrack中获取5个marker球的坐标)。
(3)在CATIA软件中,创建一个包含创建5个虚拟marker球的part文件B,尺寸与真实反光球尺寸一致。
(4)在CATIA中将partA与partB文件根据空间位置对齐原理通过任意3个球进行空间位置对齐。
(5)将partA文件导出为*.wrl文件,由此便完成了实物模型与虚拟模型的位置对齐。在虚拟现实软件Techviz端便可以对此模型进行调用。通过此种方法创建的动作捕捉模型精度可达±1mm。在虚拟现实软件Techviz中显示效果如图10所示。
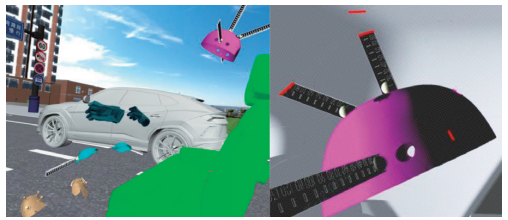
图10 基于ART开发动作捕捉模型虚拟示意
5 ART触觉反馈手套
ART Fingertracking2手套是ART追踪系统的附加组件,可同步追踪双手的手指位置。该设备支持最多2人/4手操作,提供3指与5指两种版本。其与控制器的同步通信采用无线方式。Fingertracking2手指追踪设备由多个红外LED显示(infrared LEDs)、一个用于无线同步的红外接收器(IR receiver)、一个电池舱(battery compartment)和一组手指套连接器组成。Fingertracking2触觉设备(仅限3指版本)每个指套顶部内部设有2.15mm×8mm精密微驱动电机,可通过调用SDK接口实现虚拟物体碰撞感应功能,让用户能实时感知虚拟环境中物体的碰撞。Fingertracking2(3指)触觉手套结构如图11所示。
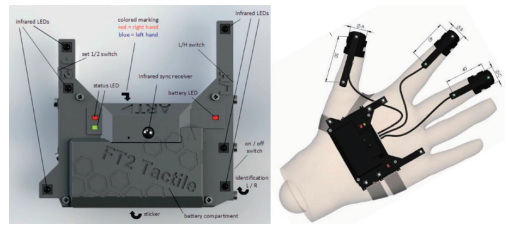
图11 Fingertracking2
(3指)触觉手套结构Fingertracking2(3指)触觉手套在使用前需进行位置校准。校准示意如图12所示,值得注意的是,在单独使用Fingertracking2(3指)触觉手套时,仅指尖位置可以被准确追踪,手背及手腕的位置无法被准确追踪。
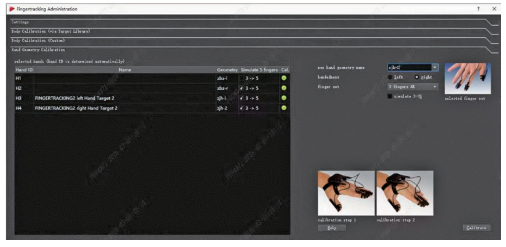
图12 Fingertracking2校准示意
6 光学动作捕捉在汽车人因分析方面的应用
汽车行业内越来越多通过光学动作捕捉进行人体姿态分析。中国标准化研究院呼慧敏及安道拓公司贾伟等人利用光学动作捕捉获取乘员各舒适姿态角度并进行汽车座椅乘坐姿态舒适性等级分级的研究。新疆大学霍笑等人利用光学动作捕捉开展基于坐姿的座椅舒适度测试与评价。光学动作捕捉数据与分析与逻辑如图13所示。

图13 光学运动动捕数据处理逻辑
本文中ART-Human的动作捕捉数据可导入到Ramsis next generation进行人因工程分析,实现基于真实人体动作的舒适性、可达性等人因分析。详细方法是将ART-Human的动作数据导出为CSV文件,在Ramsis next generation软件中导入CSV文件,可实现动作数据在Ramsis中的重放,同时借助Ramsis next generation软件实现乘坐人体的姿态角度,示意如图14所示。
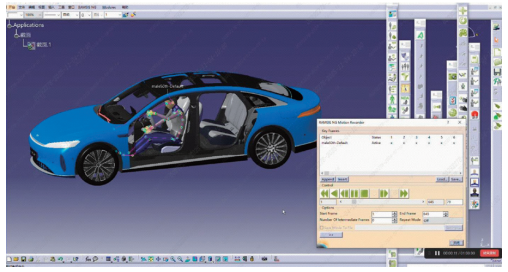
图14 全身动作捕捉数据导入Ramsis示意
另外可根据ART动作捕捉进行乘坐人员眼点位置统计。方法是将位置检测球置于人眼位置,便可看到人眼位置,可通过此种方式进行乘坐人员的人眼位置统计。如图15所示,统计不同被试人员的人眼位置,图中绿色球体位置为被试乘坐人员的眼睛位置,由此可直观看出被试乘坐人员的眼睛位置与设计眼椭圆及设计眼点位置关系。
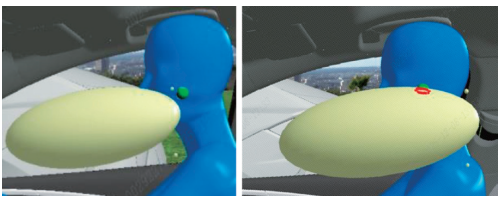
图15 人眼位置统计示意
7 结语
光学动作捕捉系统在汽车人机工程虚拟评审中起到了至关重要的作用,汽车人机工程虚拟评审对光学动作捕捉的定位及虚拟适配人体模型精度都提出了更高的要求。本文针对ART动作捕捉系统创新地进行全身动作捕捉的优化及适应性开发,适配汽车评审的快速精准的要求,适合在汽车行业人机评审中进行大面积的推广及应用。
参考文献
[1] 何天宇,罗奇.运动捕捉技术及其在体育运动中的应用研究综述[J].电子测量技术,2019,42(3):140-146.
[2] 郭正奕.运动捕捉技术在戏剧与影视中的应用[J].数字技术与应用,2024,(6):136-138.
[3] Fabio Bruno, Loris Barbieri, Maurizio Muzzupappa. A Mixed Reality system for the ergonomic assessment of industrial workstations[J].International Journal on Interactive Design and Manufacturing(IJIDeM) (2020)14:805–812.
[4] 杨克璧,张宝柱,张建豪,等.基于Techviz及A.R.T.动作捕捉技术的汽车人机工程虚拟现实验证系统[J].汽车技术,2025(2):89-94.
[5] 罗豪龙,李建胜,罗丹平,等.大场景光学动作捕捉系统标定方法研究[J].光子学报,2023,52(11):1111003.
[6] 王俊威,西勤,冯其强,等.OptiTrack系统点位测量的精度测试[J].北京测绘,2017(SI):294-300.
[7] 何雪涛,程源,黄钟,等.齐次坐标变换在空间机构分析中的应用[J].北京化工大学学报.1999,26(1):41-44.
[8] 呼慧敏,李江南,罗玲,等.基于中国乘员的汽车座椅乘坐姿态舒适性评价分级模型[J]机械设计.2024,41(3):91-98.
[9] 霍笑,孙文磊,陶庆,等.基于坐姿分析的座椅舒适度测试与评价[J].工程设计学报.2017,24(3):286-294.
本文为“AI汽车制造业”首发,未经授权不得转载。版权所有,转载请联系小编授权(VOGEL100)。本文作者:汪建安 任恒 杨克璧 张宝柱 宁冬双 吴瑞,单位:奇瑞汽车股份有限公司。责任编辑龚淑娟,责任校对何发。本文转载请注明来源:AI汽车制造业
AI汽车制造业
龚淑娟
李峥
相关推荐
-

乘用车保险杠注塑潜流线面品缺陷改进研究
保险杠外观是实现整车造型需求的重要特征。潜流线缺陷作为保险杠注塑成型过程中常见的表面质量问题,表现为制品表面出现凸起的线性痕迹,严重影响产品外观。本文结合多学科优化方法,从产品设计、材料特性、模具设计和工艺控制四个维度系统分析潜流线缺陷的形成机理,并提出针对性缺陷改进策略。研究表明,通过熔体压力平衡控制、浇注系统优化及工艺参数精准调控,可有效消除保险杠外观潜流线缺陷,提升产品合格率。本研究结果为汽车塑料部件注塑质量控制方面提供了理论和实践依据。
2026-05-11
-

AI驱动的悬架控制臂3D打印革新实践
本文探讨工业级金属增材制造(3D打印)技术与人工智能算法深度融合的创新实践,详细阐述了我公司如何成功帮助A公司实现关键轻量化部件的“增效降本”。实践表明,该方案不仅将零件质量减轻45%,生产周期缩短60%,更通过AI预测性维护与缺陷识别显著降低了废品率与运营成本,为汽车制造业的数字化转型提供了具有高度参考价值的范本。
2026-05-09
-

自适应用能技术的研究与探索
当前工厂生产过程中普遍存在的能源浪费突出、用能效率偏低等痛点,不仅制约了企业降本增效目标的实现,也与绿色生产、低碳制造的发展要求存在差距。本文以汽车零部件企业注塑加工设备与空压机系统为研究对象,聚焦注塑机余热回收利用不足、模温机冷却系统的能源浪费和空压机用能冗余三大核心用能痛点,结合车间实际生产工况与能源消耗特征,设计自适应用能方案与能源梯次利用技术路径。经工厂实际工程应用验证,该技术方案有效实现了能源的梯次回收与自适应调控,大幅降低了生产能耗与运营成本,且项目投入产出比优异,兼具经济价值与环保效益,为行业提供了可复制、可推广的工程实践参考。
2026-05-08

热点文章
-

-

智能网联汽车轨迹优化方法研究综述
2026-07-07
-

中国企业出海中的人才战略与文化融合
2026-07-07
-

看见·增程的“第二生长曲线”
2026-07-14
-

面向ISO 34505的自动驾驶场景评价及测试优先级分析
2026-07-13
-

连接器如何破局?莫仕携“系统级决绝方案”迈入新阶段
2026-07-08
-

大陆集团40亿欧元出售康迪泰克
2026-07-08





评论
加载更多