ISC 2022重磅成果︱《智能网联汽车预期功能安全场景库及测试评价关键技术》发布
8月31日,第四届世界智能安全大会(FISITA ISC 2022)于北京成功召开,《智能网联汽车预期功能安全场景库及测试评价关键技术》在大会上重磅发布。
“自动驾驶安全第一”,预期功能安全作为自动驾驶安全重要的方面,主要研究由于功能不足、性能局限、可合理预见的人员误用导致的安全问题。由中国工程院院士、中国汽车工程学会理事长、清华大学教授李骏院士牵头的中国智能网联汽车产业创新联盟—预期功能安全工作组,主要致力于推动预期功能安全方面的协同创新。工作组本次发布的《智能网联汽车预期功能安全场景库及测试评价关键技术》成果,涵盖研究方法论和相关实践应用,全面展示预期功能安全工作组在五十七家成员单位的参与和支持下取得的阶段性研究进展。新成果发布由清华大学车辆与运载学院副研究员,CAICV预期功能安全工作组执行副组长王红博士代表汇报。
成果主要内容包括:
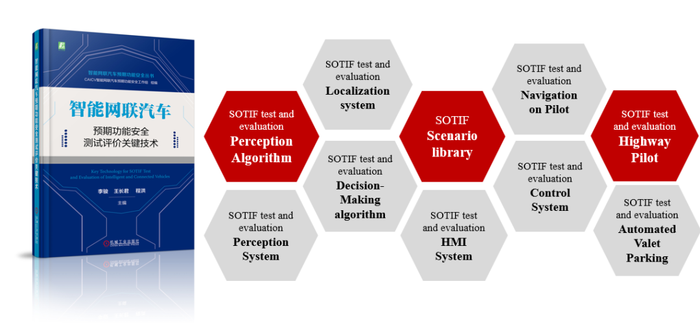
基于关键场景的预期功能安全测评方法
预期功能安全场景共享平台
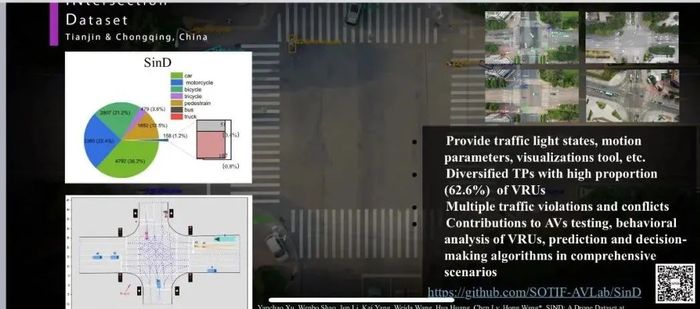
中国特色航拍数据集
预期功能安全相关技术报告、标准、著作等
清华大学车辆与运载学院副研究员,CAICV预期功能安全工作组执行副组长王红博士代表工作组发布成果
《智能网联汽车预期功能安全场景库及测试评价关键技术》主要内容详解
1. 基于关键场景的预期功能安全测评方法
报告发布了基于关键场景的预期功能安全测评方法。工作组以ISO 21448标准中定义的预期功能安全概念为基础,结合国际智能网联汽车测评实践和规范标准,提出了以关键场景为核心,以中国优秀谨慎驾驶员为可接受准则,从算法-部件到整车的预期功能安全测试评价方法。报告还发布了方法论的实践相关技术成果。由清华大学牵头,在中汽数据提供的场景库管理工具ADManager大力支持下,工作组十四家单位共建预期功能安全场景共享平台,以SOTIF触发条件为核心,收集分享SOTIF典型场景,进一步打造以场景库为核心的预期功能安全场景工具链,目前已打通由场景文件自动导出OPEN系列标准场景技术路径,计划形成采集-生成-评估一站式预期功能安全场景测评平台;以高速巡航为例,工作组内高校、企业等多家单位联合进行测评方法应用实践,产出技术报告5份、标准2项、著作1本。预期功能安全测评方法将研究思考和工程应用相结合,提供了预期功能安全测评的参考流程,完善了智能网联汽车测评体系,为预期功能安全实践的进一步开展提供导引。
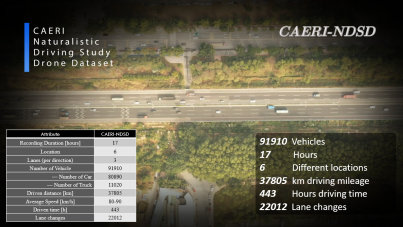
2. 中国特色场景航拍数据集
报告发布了中国特色场景航拍数据集。该航测数据集分别聚焦高速、城市快速路十字路口等多城市、多路段典型场景,包含切入、切出、前车制动、无保护左转等SOTIF关键场景,采集并标注车辆坐标在内的关键信息,总时长近40小时,总驾驶里程超过50000km,包括由吉林大学&大疆车载建立的中国高速快速路拥堵场景航测数据集Aerial Dataset for China Congested Highway & Expressway(AD4CHE)、清华大学建立的城市路口数据集Signalized Intersection Dataset(SinD)以及中国汽车工程研究院股份有限公司建立的CAERI Naturalistic Driving Study Drone Dataset(CAERI-NDSD)数据集。中国特色场景航拍数据集深度挖掘中国交通特色,捕捉场景关键信息,能够有效支持人类驾驶行为模型构建、测试场景生成等研发工作,在脱敏情况下,为在学术研究和工程实践应用提供支撑。

本次发布的预期功能安全成果充分展示了预期功能安全概念的中国解读、中国特色、中国技术和中国实践,进一步推动了预期功能安全概念落地和完善。本次发布现场参会嘉宾超过300人,网上观看量超过15万次,所发布的新成果受到参会专业嘉宾和业界代表的广泛关注。
关于中国智能网联汽车产业创新联盟—预期功能安全工作组
中国智能网联汽车产业创业联盟——预期功能安全工作组(CAICV-SOTIF Technical Alliance),由中国工程院院士、中国汽车工程学会理事长、清华大学教授李骏院士担任组长,由政府-高校-企业的五十七家单位组成,围绕智能网联汽车预期功能安全构建“政用产学研“协同合作机制。预期功能安全工作组致力于促进预期功能安全理论方法和技术创新研究,聚焦于SOTIF测试体系、技术创新、测试和验证能力以及场景库、数据库和标准四大方面。
热点文章
-

智能汽车场景化开发:系统融合与 用户体验的协同研究
2026-07-20
-

“泰钽”来了!开启智能越野3.0时代
2026-07-22
-

基于传动效率的多模复合功率分流混合动力系统模式控制研究
2026-07-21
-

乘用车混合动力总成系统设计和性能仿真研究
2026-07-22
-

动力系统主导车市质变,增程器迈入系统竞争
2026-07-23
-

基于深度学习的电驱实验系统设计
2026-07-24
-

-
基于深度学习的电驱实验系统设计
针对传统永磁同步电机建模方法难以兼顾精度与实时性的问题,本文基于深度学习技术提出一种融合物理约束的永磁同步电机降阶模型,通过深度神经网络实现对电机非线性电磁特性的精细化建模。围绕所提降阶模型,搭建了电驱实验系统,并将该模型集成至电驱系统中,实现了实时硬件在环验证。在不同工况下对降阶模型和传统dq轴解析模型开展实验分析,结果表明,所提出的基于深度学习的永磁同步电机降阶模型在保证高精度建模的同时,实现了更好的动态性能。该模型支撑的实验系统可用于电驱系统的快速仿真与控制算法研究,具有良好的工程应用前景。
作者:
-
动力系统主导车市质变,增程器迈入系统竞争
-
“泰钽”来了!开启智能越野3.0时代
-
乘用车混合动力总成系统设计和性能仿真研究
-
基于传动效率的多模复合功率分流混合动力系统模式控制研究
-
智能汽车场景化开发:系统融合与 用户体验的协同研究





评论
加载更多