一种汽车灯光动态跟随的照明功能设计
0 前言
车辆灯光在人们日常用车活动中占据大量的使用场景,如何设计出更多、更友好、更精致的灯光功能,从而提升用户使用车辆灯光的便利,成为汽车工程师持续探索的任务。本文基于 UWB 定位技术设计实现外部灯光在用户携带钥匙靠近车辆、离开车辆时,做到人动即灯动,灯随人动,给用户带来实时的路况照明,给客户带来人车互动的精致迎宾和送宾服务体验。
1 灯光动态跟随照明功能概述
1.1 功能介绍
当功能设置开启时,用户携带智能钥匙靠近或远离车辆,车辆检测到用户的实际位置,根据用户位置分别控制车辆的左前灯和右前灯转动不同的角度,将左前灯和右前灯的灯光都照射在用户位置处。
(1)动态跟随照明功能开启设置用户通过车辆中控屏的虚拟开关设置动态跟随光点照明功能开启 / 关闭。
(2)动态跟随照明图案设置用户通过中控屏设置动态跟随功能投射的图案。
(3)用户钥匙坐标信息识别通过短距离高速传输数据的无线射频通信技术,准确检测用户钥匙的精确位置信息。
(4)外部环境光线信息通过车辆的光线传感器判断车辆的外部环境光线
是否昏暗,作为点亮灯光的条件。
(5)动态跟随照明控制根据用户钥匙的精确位置,控制车辆的左前灯和右前灯进行灯光跟随。
1.2 功能边界
功能边界如图 1 所示。
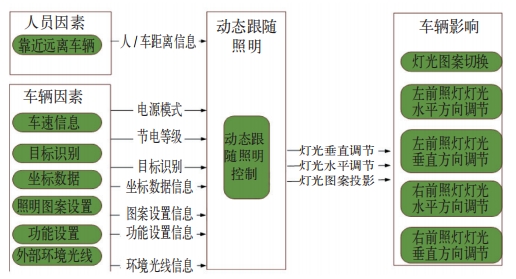
图1 灯光动态跟随照明功能边界
2 灯光动态跟随照明功能策略
2.1 功能实现流程
功能实现流程如图 2 所示。当功能设置为开启状态时,车辆获取外部环境光线强度,当环境光线强度低于一定值时,判断需要开启车辆车灯,此时定位用户的位置信息,判断用户的位置信息是否在预设的检测范围内,若在检测范围内,根据用户的位置信息分别计算车辆的左前灯和右前灯在水平和垂直方向两个维度需要转动的角度,计算完成后,分别控制左前灯和右前灯在水平和垂直两个位置进行转动,将灯光汇聚照射在用户位置。
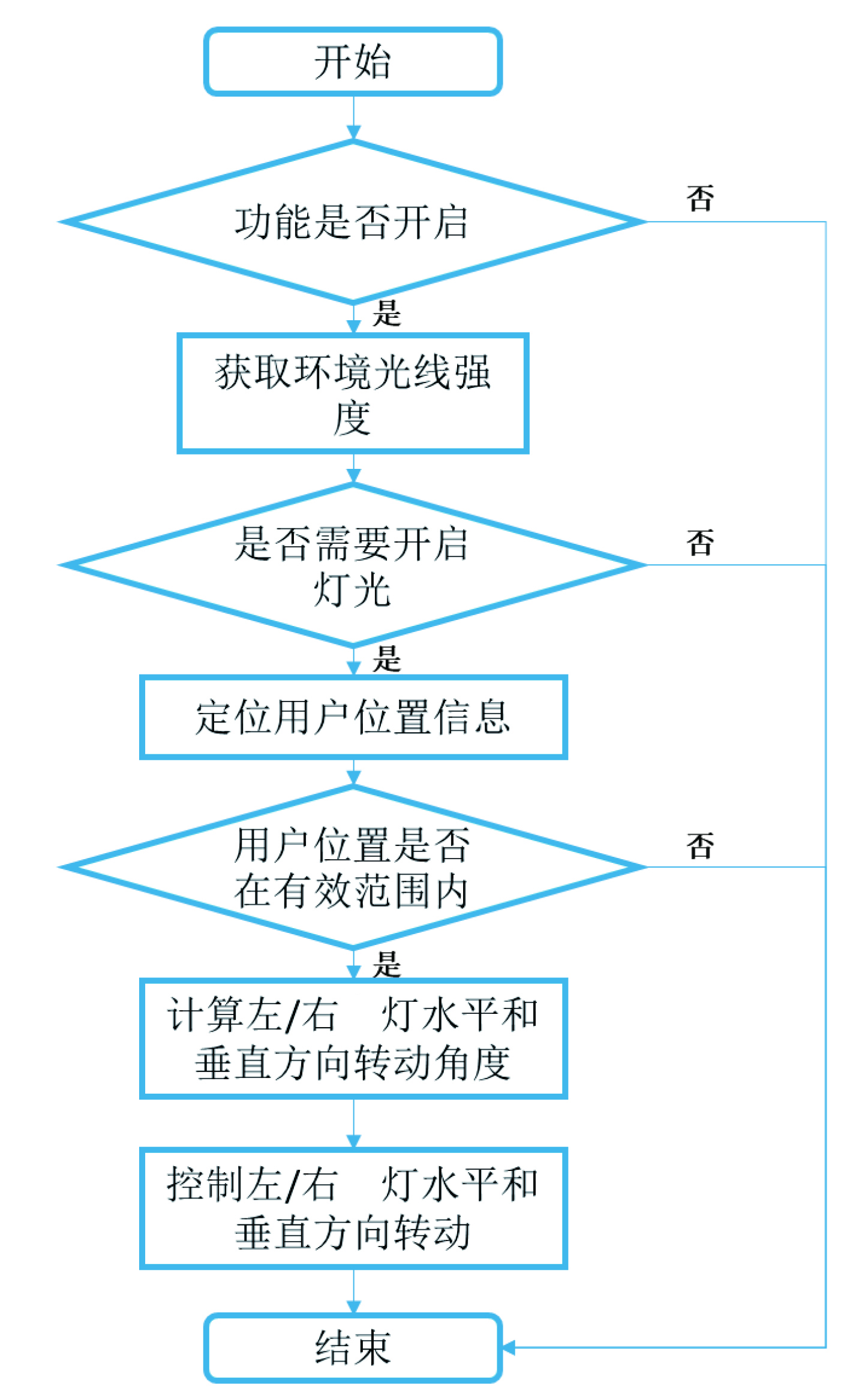
图2 灯光动态跟随照明功能流程
2.2 功能实现框图
功能实现框图如图 3 所示。
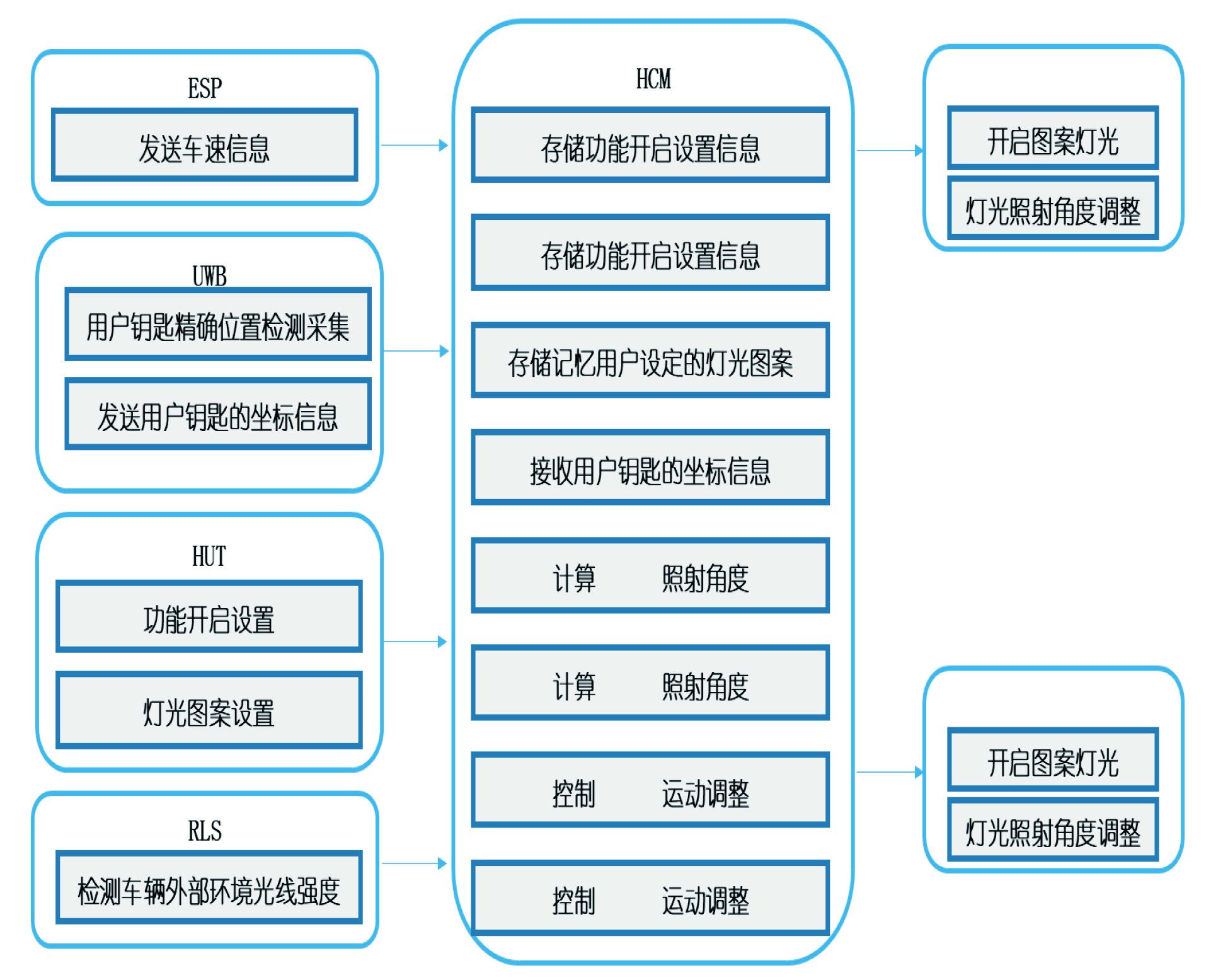
图3 功能实现框图
(1)功能开启 / 关闭设置
车辆中控屏增加动态跟随功能开启 / 关闭虚拟开关,当用户开启开关时,HUT 发送功能开启信息给HCM ;当用户关闭开关时,HUT 发送功能关闭信息给HCM。虚拟开关进行记忆,当车辆下电并重新上电后,开关状态为下电之前的状态。
(2)灯光图案设置
当中控屏的动态图跟随功能开启时,用户可选择灯光图案,HUT 发送用户设置的灯光图案信息给 HCM,当中控屏的动态图跟随功能关闭时,用户无法选择灯
光图案。
(3)车辆外部环境光线强度识别
RLS 采集光线传感器检测的车辆外部光线强度,将光线强度发送给 HCM,作为车灯是否开启的条件。
(4)检测用户钥匙的精确位置并发送坐标信息
UWB 检测用户钥匙的X、Y、Z 三个方向的坐标信息,并将坐标信息发送至 HCM,用于控制前灯跟随的水平方向和垂直方向的角度调整。
(5)检测车辆车速信息
ESP 检测车辆的车速信息发送给 HCM,作为灯光跟随的条件。
2.3 功能实现控制策略
前置条件:车辆静止(车速≤ 5 km/h)且光线强度小于阀值(判断为昏暗环境)且虚拟开关状态为开启状态。
控制逻辑:
(1)当光线强度较小时,HCM 判断为昏暗环境,当检测到用户钥匙时,开启左前灯和右前灯。
(2)HCM 开启左前灯和右前灯时,根据接收的HUT 发出的灯光图案进行点亮,若在点亮过程中,用户切换灯光图案,则 HCM 控制切换灯光图案。
(3)左前灯和右前灯的灯光开启后,进行判断,若车速≤ 5 km/h,则控制左前灯和右前灯的运动机构进行跟随控制。若车速> 5 km/h,则无法控制左前灯和右前灯的运动机构进行跟随控制。
(4)左前灯和右前灯的后端部位分别有两个电动机,接收 HCM 的运动控制指令后,两个电动机进行转动,从而通过传动机构使车灯后端部位能够进行垂直方向的上下运动和水平方向的左右运动。
(5)HCM 根据接收到 UWB 发送的用户钥匙X、Y、Z 三个方向的坐标进行跟随控制。
2.4 功能实现方法
用户携带钥匙到达车辆前部,此时检测用户钥匙的坐标位置,并控制左前灯和右前灯进行运动,将左前灯和右前灯的灯光照射至用户钥匙位置。
水平方向钥匙位置坐标定位如下:
如图4所示,设左右前灯之间的距离为Amm,左右前灯之间的中心点为坐标原点0,左前灯的坐标为(X:-½A,Y :0),右前灯的坐标为(X:﹢ ½A,Y:0),车辆前部的 UWB 测量最远距离点坐标为(X:0,Y:+B),从而定位用户钥匙在水平方向的位置坐标为(X:-¼A,Y :+½B)。
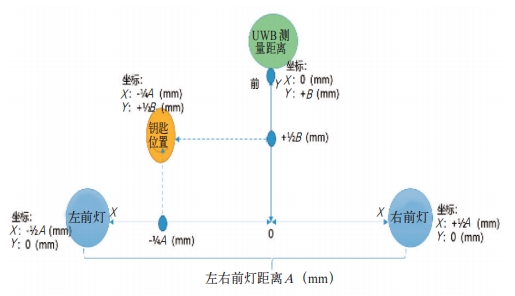
图4 水平方向钥匙位置坐标定位方案
垂直方向钥匙位置坐标定位如下:
如图5所示,左右前灯之间的中心点为坐标原点0,在原点垂直向上Z方向,UWB测量距离最大点的坐标为(X:0,Y:0,Z:+C),钥匙在水平X方向的坐标为 -¼A,钥匙在水平Y方向的坐标为 +½B,钥匙在垂直Z 方向的坐标为 +½C,从而定位用户钥匙的最终位置坐标为(X:-¼A,Y:+½B,Z:+½C)。
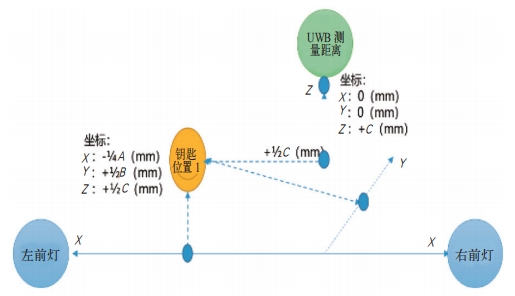
图5 垂直方向钥匙位置坐标定位方案
灯光跟随控制:左前灯的水平方向控制电动机为A1,垂直方向控制电动机为A2 ;右前灯的水平方向控制电动机为B1,垂直方向的水平方向控制电动机为B2。
假设前灯照射范围将左右前灯之间的距离完全覆盖完整,需要车灯的水平方向运动电动机最大转数为20圈;车灯照射范围将垂直方向的 UWB 测量距离完全覆盖完整,需要车灯的垂直方向运动电动机最大转数为20圈,那么可将电动机的转动圈数与坐标距离进行对应。
HCM计算出用户钥匙的最终位置坐标后,根据位置坐标控制左前灯和右前灯的运动电动机进行转动,从而使左前灯和右前灯的灯光跟随用户钥匙。
车灯的水平方向控制电动机向左转动为正转,向右转动为反转;垂直方向控制电动机向上转动为正转,向下转动为反转。
用户钥匙的最终位置坐标为(X:-¼A,Y:+½B,Z:+½C),说明钥匙的位置位于车辆的中心偏左侧,钥匙的位置坐标与左前灯的距离为 1/4,与右前灯的距离为3/4,距离车灯的水平面的垂直距离为1/2,故需 HCM控制左前灯的水平运动电动机 A1 向右反方向旋转5圈,HCM控制左前灯的垂直运动电动机 A2向上正转10圈。HCM控制右前灯的水平运动电动机B1向左正方向旋转15圈,HCM控制右前灯的垂直运动电动机B2向上正转10圈。此时左前灯和右前灯射出的灯光可覆盖车辆前面Y方向的区域。从而实现左前灯和右前灯的灯光可照射在用户钥匙的位置上。
当用户钥匙的位置坐标变化时,HCM实时计算钥匙的位置坐标,再实时控制左前灯和右前灯的运动电动机A1、A2、B1、B2进行相应的转动,即可实现灯光跟随,实时将设定好的灯光图案照射在钥匙位置上。
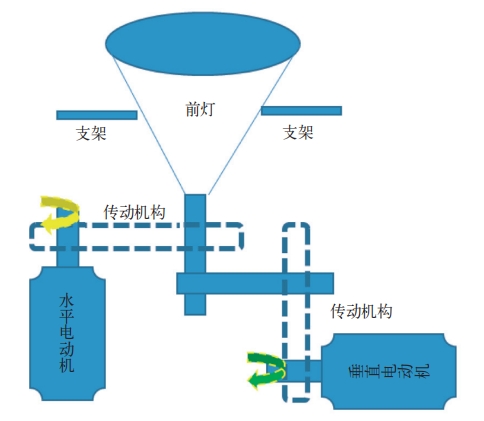
图6 车灯运动结构示意
3 结论
本文设计的汽车灯光动态跟随照明功能,基于UWB 定位技术,利用车辆钥匙、车内定位模块、车灯控制系统、车辆中控屏、光线传感器及灯光控制器等控制模块相互配合,实现用户携带钥匙靠近或离开车辆时,汽车灯光实时跟随用户位置而调整照射角度,实时照亮用户所在位置,建立与用户友好交互,极大提高用户使用车辆的便利性,提升用户的用车体验。
参考文献
[1] 乔海晔,邓超 . 汽车灯光智能控制系统的设计与实现 [J]. 硅谷,2010(17).
[2] 徐祖泽,李威远,张浩驰,等 . 智能汽车灯光控制系统 [J],2019(10).
[3] 贺宏坤,史浩山 .UWB 多目标异步定位改进方法 [J].系统仿真学报,2009(21).
本文为“AI汽车制造业”首发,未经授权不得转载。版权所有,转载请联系小编授权(VOGEL100)。本文作者:郝春成 李卫东 张城 ,单位:长城汽车股份有限公司 。责任编辑龚淑娟,责任校对何发。本文转载请注明来源:AI汽车制造业
AI汽车制造业
龚淑娟
李峥
热点文章
-

-

智能网联汽车轨迹优化方法研究综述
2026-07-07
-

看见·增程的“第二生长曲线”
2026-07-14
-

中国企业出海中的人才战略与文化融合
2026-07-07
-

面向ISO 34505的自动驾驶场景评价及测试优先级分析
2026-07-13
-

浅谈智能座舱与人机交互技术创新
2026-07-14
-

连接器如何破局?莫仕携“系统级决绝方案”迈入新阶段
2026-07-08
-
浅谈智能座舱与人机交互技术创新
在汽车电动化、智能化、网联化深度融合的产业趋势下,智能座舱已从配置竞争转向技术体系与落地能力的竞争。本文以零跑汽车为案例,从中央集成电子电气架构、高算力硬件、自研车机操作系统、多模态交互、舱驾融合以及车载大模型六大技术维度,对智能座舱与人机交互关键技术进行深入解析,并聚焦底层技术实现、工程化落地、量产应用效果与成本控制逻辑。研究表明,零跑汽车实现了高阶智能技术的大众化,为自主品牌提供了可复制的实践路径,验证了技术落地成效,并指明了未来优化方向。
作者:
-
看见·增程的“第二生长曲线”
-
面向ISO 34505的自动驾驶场景评价及测试优先级分析
-
国产化替代正当时:永铭车规级固液混合电容,为激光雷达发射端与算力核心提供高纹波耐受解决方案
-
智能网联汽车轨迹优化方法研究综述
-
AI《汽车制造业》增刊





评论
加载更多