基于达索3DE系统的数字化工厂搭建及虚拟验证
0 前言
数字化工厂的搭建作为汽车行业智能制造的重要组成部分,在汽车开发中发挥着不可或缺的作用。目前数字化工厂搭建主要基于两个平台:一是西门子公司的Tecnomatix软件,另一个是达索系统的3DE平台。本文主要讨论基于达索3DE系统的数字化工厂搭建,以及相关的虚拟验证工作的开展。
本文涉及的数字化工厂搭建和虚拟验证主要涉及达索3DE平台的PDM、CATIA、焊装结构化工艺设计(Fastener Planning)和焊装工艺仿真(Robot Spot Simulation)模块。其中,PDM作为数据主线,打通产品数据—工艺仿真,实现工艺同步开发及虚拟验证,如图1所示。
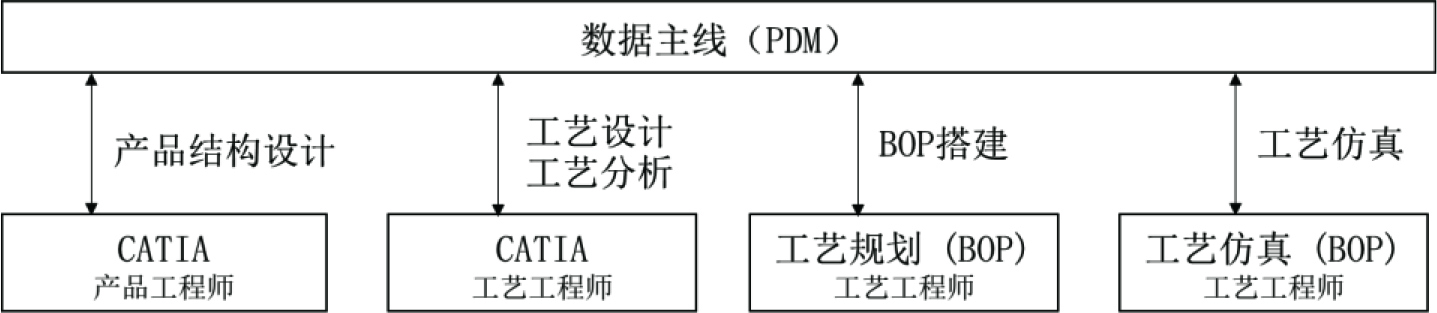
图1 3DE平台的主要模块
1 数字化工厂的结构化工艺树
结构化工艺树(Billsof Process,BOP)从组成结构上包括产品数据、工艺设计方案(主要包括产品分块和定位系统)、资源(主要包括工装设备)和工序。
其中,工序作为主干结构,关联其他结构。如图2所示,搭建完整BOP(工艺清单)结构,可以将“什么产品,在哪个工位,通过哪些工装设备,完成了什么动作,形成了什么产品”结构化地呈现出来。

图2 数字化工厂的结构化工艺树
2 数字化工厂的搭建、工艺设计及虚拟验证流程
数字化工厂的搭建、工艺设计及虚拟验证流程主要包括产线布局、3D建模、运动机构创建、工艺流程设计和定位系统设计,如图3所示。
针对虚拟验证的问题项,一般通过两个途径解决:一是设计优化,主要包括产品结构、工艺流程和定位系统的优化;二是工装设备优化。
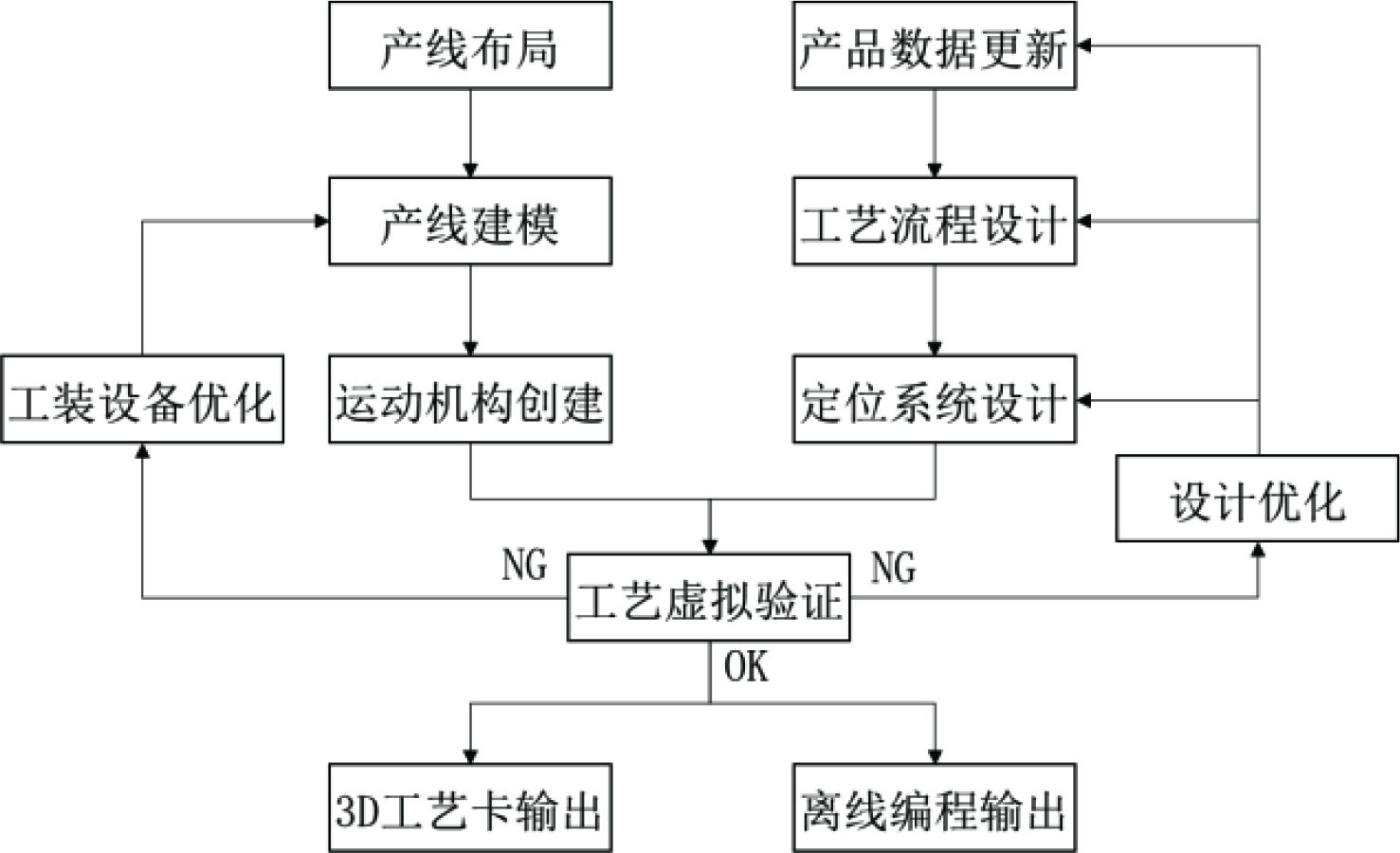
图3 数字化工厂的搭建、工艺设计及虚拟验证流程
2.1 产线布局和3D建模
搭建数字化工厂首先要完成资源库的搭建。资源库主要包括产线布局、设备(输送、机器人、焊钳、涂胶设备和拧紧设备等)、工装(夹具、抓手等)及其他(钢构、防护栏和光栅等),如图4所示。

图4 资源库的分类
关键工装及设备需创建可编辑的数据格式,其他可通过现场扫描仪或标准单元,以轻量化的数据格式导入资源库。根据产线布局,将3D数模调整至相应位置,完成数字化工厂的静态模型搭建,如图5所示。
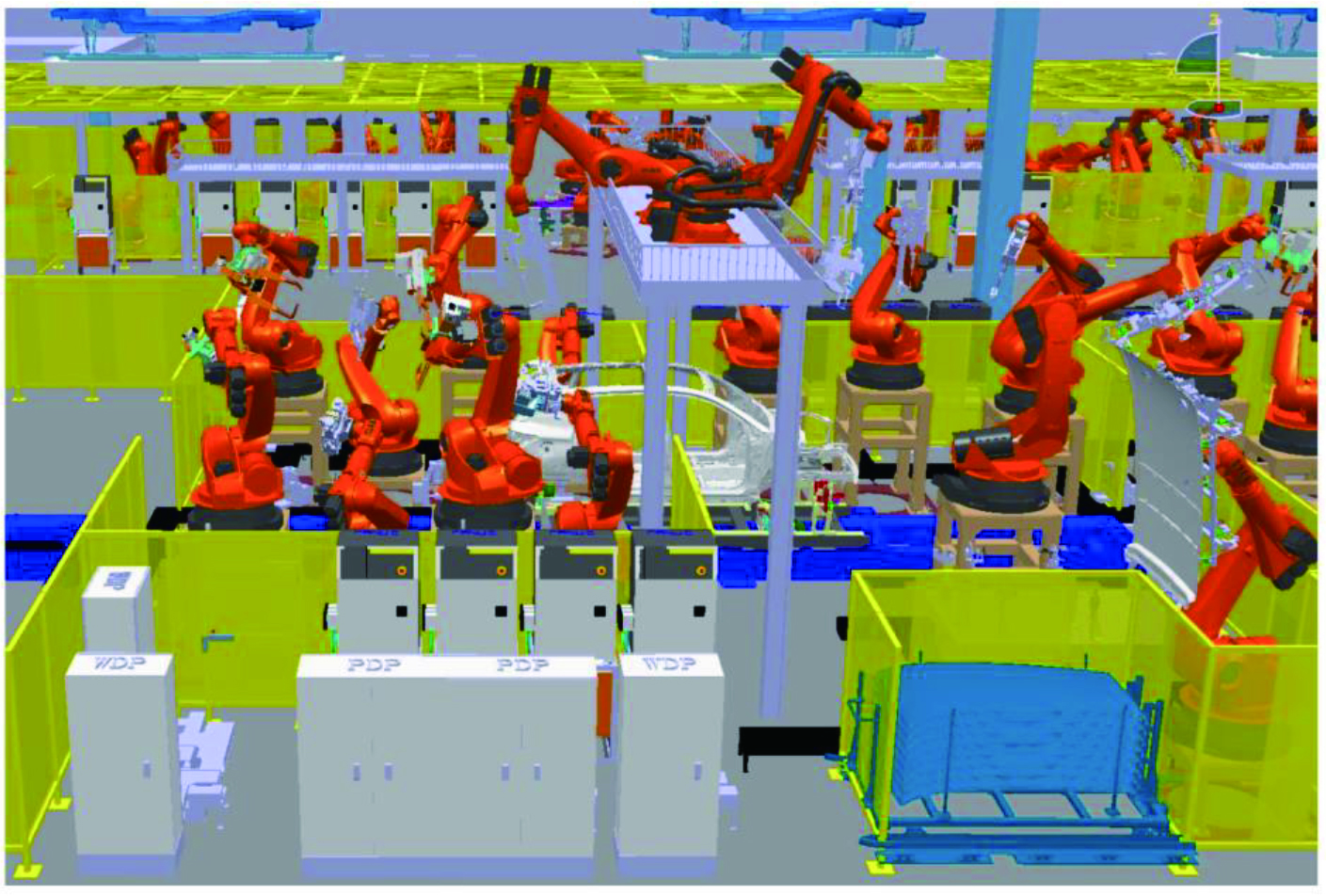
图5 数字化工厂的静态模型搭建
2.2 运动机构的创建
焊装资源库中,焊枪和夹具是需要创建运动机构的。以焊钳为例,需定义焊钳动臂、静臂、TCP点、动臂运动方向、距离和焊接时间等,如图6所示。

图6 焊钳的运动机构创建
2.3 工艺流程设计
在EBOM(电子物料清单)基础上,将工艺流程进行拆分。拆分过程中主要考虑的因素包括产品分块与结构合理性、工位和工序规划与节拍平衡。拆分完成后,将焊点根据连接零件重新分配。
2.4 虚拟验证及结果输出
焊装虚拟验证以机器人焊点可达性为主,主要验证内容包括机器人姿态可行性、焊接过程中机器人、焊钳与零件工装是否干涉、进出及运动空间校核以及节拍分析,如图7所示。
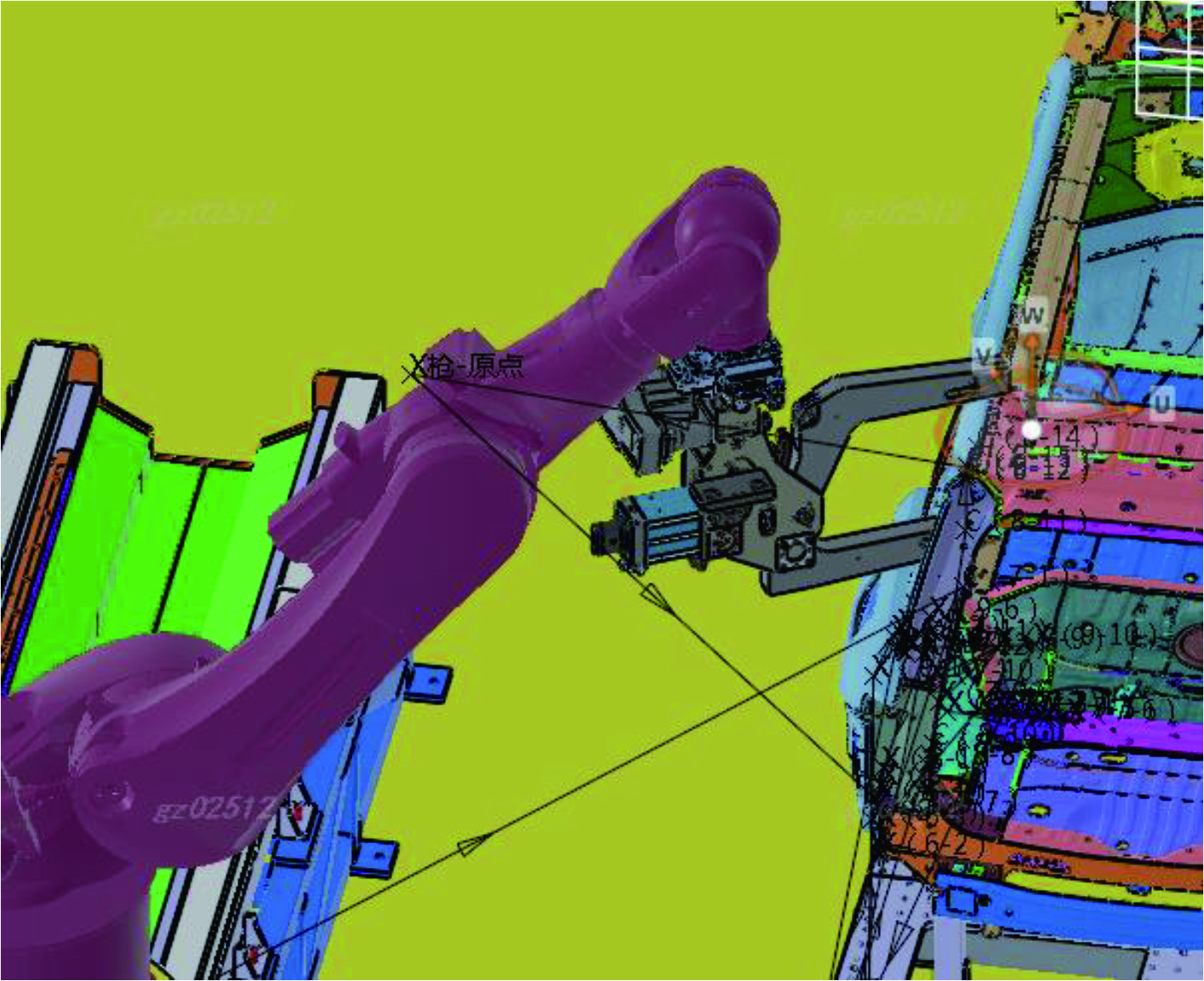
图7 机器人焊接可达性校核
针对虚拟验证的不可行项,常见对策包括调整焊点的焊接工位或机器人或焊钳、产品结构更改、工艺流程调整、夹具方案变更和新增焊钳。
3 结语
通过数字化工厂的搭建和虚拟验证过程,可以实现缩短产品设计开发周期、降低设变费用和制造一致性及质量保证。我们认为虚拟验证在效率提升方面仍有以下发展空间:
(1)打通产品到工厂的数据通道,实现产品设计数据和仿真数据的同步迭代。
(2)通过定制化开发实现部分仿真功能的自动化校核,进一步提高虚拟仿真效率。
参考文献
[1] 陈志毅,李少华,姚亮,等.基于Tecnomatix的数字化孪生工厂搭建及工艺验证[J].汽车工艺与材料,2024,(2)
[2]王德权.基于数字孪生的虚拟数字化工厂平台[J].智能制造,2022(5):50-53.
本文为“AI汽车制造业”首发,未经授权不得转载。版权所有,转载请联系小编授权(VOGEL100)。本文作者:高菁菁 刘志敏 尹健 ,单位:广州汽车集团股份有限公司汽车工程研究院 。责任编辑龚淑娟,责任校对何发。本文转载请注明来源:AI汽车制造业
AI汽车制造业
龚淑娟
李峥
相关推荐
-

-

浅谈人工智能中的图像识别技术
图像识别是人工智能的一个重要领域,是指利用计算机对图像进行处理、分析和理解,以识别各种不同模式的目标和对像的技术。一般工业使用中,采用工业相机拍摄图片,然后再利用软件根据图片灰阶差做进一步识别处理。
2022-02-21
-


热点文章
-

智能汽车场景化开发:系统融合与 用户体验的协同研究
2026-07-20
-

“泰钽”来了!开启智能越野3.0时代
2026-07-22
-

基于传动效率的多模复合功率分流混合动力系统模式控制研究
2026-07-21
-

乘用车混合动力总成系统设计和性能仿真研究
2026-07-22
-

动力系统主导车市质变,增程器迈入系统竞争
2026-07-23
-

基于深度学习的电驱实验系统设计
2026-07-24
-

-
基于深度学习的电驱实验系统设计
针对传统永磁同步电机建模方法难以兼顾精度与实时性的问题,本文基于深度学习技术提出一种融合物理约束的永磁同步电机降阶模型,通过深度神经网络实现对电机非线性电磁特性的精细化建模。围绕所提降阶模型,搭建了电驱实验系统,并将该模型集成至电驱系统中,实现了实时硬件在环验证。在不同工况下对降阶模型和传统dq轴解析模型开展实验分析,结果表明,所提出的基于深度学习的永磁同步电机降阶模型在保证高精度建模的同时,实现了更好的动态性能。该模型支撑的实验系统可用于电驱系统的快速仿真与控制算法研究,具有良好的工程应用前景。
作者:
-
动力系统主导车市质变,增程器迈入系统竞争
-
“泰钽”来了!开启智能越野3.0时代
-
乘用车混合动力总成系统设计和性能仿真研究
-
基于传动效率的多模复合功率分流混合动力系统模式控制研究
-
智能汽车场景化开发:系统融合与 用户体验的协同研究





评论
加载更多