自动驾驶技术的研发之路

自动驾驶是汽车安全领域的一个关键议题。随着应用在车辆上的技术越来越多,很明显自动驾驶已经成为了一种发展趋势。TRW在传感器、电子控制和驱动三个核心领域的丰富经验能够帮助实现半自动、高自动化甚至全自动驾驶。
驾驶辅助和半自动驾驶系统的未来并未变得更加乐观。各方面都对提高道路安全施压——美国政府、美国公路交通安全管理局(NHTSA)、欧盟、世界卫生组织(WHO),以及众多消费者机构,尤其是欧洲新车安全评价规程(Euro-NCAP)。法规和新的NCAP评分是有形的市场驱动机制,同时关于车辆安全性问题,广大媒体也密切关注着汽车制造商,甚至非汽车企业如Google等。
根据2012年J.D.Power的一份调查,受访的17400名车主中,37%的人表示有兴趣购买一辆全自动驾驶的汽车,但是当他们获知这一技术需要花费额外的3000美元购车款时,仅20%的人还有购买意愿,其中25%的男性买家和14%的女性买家愿意购买自动驾驶汽车。
如今,人们主要会问“半自动驾驶”背后有哪些技术?未来会不会发展到我们可以坐在车上处理邮件,让汽车自动驶往公司呢?
现在的驾驶辅助系统(DAS)的大部分独立功能是使用传感器输入的数据来给驾驶员提供支持或响应紧急情况。应急和安全功能,如自动紧急制动(AEB)与舒适性功能如车道居中辅助(LCA)或车道保持辅助(LKA),这些功能之间存在不同点。一些系统会在有限的时间段内进行响应,比如LKA在侦测到车辆偏离车道后,会将车辆“推回去”。而另一些系统会提供持续的辅助,比如LCA会帮助车辆保持在车道中央行驶。
半自动驾驶就是指系统对车辆的辅助时间延长。举例来说,在车辆行驶在高速公路上的时候,自适应巡航控制系统(ACC)和LCA同时工作,控制车辆纵向及横向移动,就实现了高速公路驾驶辅助功能。半自动驾驶功能的魅力在于能够提升人们的日常驾驶体验。换言之,消费者只要进行一点额外的投资,获得的不仅仅是系统在紧急情况下的支援,而是每天驾驶时都能切身感受到的实实在在的价值。
随着驾驶干涉和辅助功能的相关技术发展日益快速,目前投产的半自动驾驶功能可能将在未来的5~10年成为主流。而全自动驾驶需要完整的车-车和车-基础设施网络支持。此类技术正在不断进化,全世界的专家都相信是时候将这种技术介绍给世界了。这一计划可能在未来的3年中就会实现,而随着应用的成熟和驾驶员的接受度不断提高,实现的时间也可能会更近。
半自动驾驶技术中最基本的零部件——传感器、控制器和执行器——可以被形容为系统的双眼、大脑和肌肉。
TRW目前的关注点
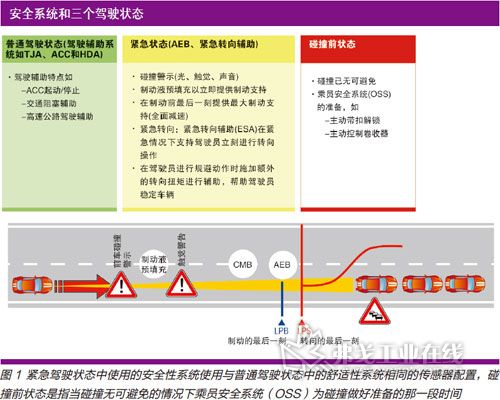
作为一家全球性的汽车零部件制造商,TRW目前正在使用这些零部件开发未来3~5年就能够投产的半自动驾驶技术。这一技术将涵盖主动驾驶辅助系统的三个状态——“普通驾驶”包括舒适性系统(如ACC系统、起动–停止系统)交通阻塞辅助系统(TJA)和高速公路驾驶辅助(HDA);“紧急”状态使用同样的传感器配置(见图1),但会进行更高级别的干预来激活自动紧急制动和紧急转向辅助(ESA);“碰撞前”状态则覆盖了一个时间段:在事故无可避免的情况下,乘员安全系统(OSS)如主动带扣解锁(ABL)和主动控制卷收器(ACR)为即将迎来的碰撞做好准备。通过一个前视摄像头和雷达之间的数据融合可以支持先进的纵向控制功能,这在汽车行业实际上已经是一种标准配置了。如今,行业普遍已经将雷达用于数据融合,因为前视的纵向控制功能都会采用这一传感器摄像头通过一条单独的CAN连接线与转向系统连接,提供纯粹基于摄像头的横向控制功能。
然而,半自动驾驶需要集成额外的传感器——可能是导航数据,也可能是超声波传感器输出的数据——数据融合就变得更加复杂。在这一层面上,TRW的工程师认为应该在构建安全局电控单元(SDE)时进行改变。SDE是一个单独的电子控制单元,能扩展驾驶辅助系统和半自动驾驶功能,并处理数据带宽的增加。举例来说,如果需要在ACC起动/停止系统中进行对超声波传感器、前视雷达和摄像头的数据进行融合,或者如果某汽车制造商想要实现360°的探测,一个集中化的数据融合单元是最具效率的选择。
高度自动化驾驶的挑战——除了法律方面——是能够使驾驶员在双手脱离方向盘的情况下(如正在阅读或打字),在有必要的特定时间段里立刻恢复对车辆的控制。
其他问题
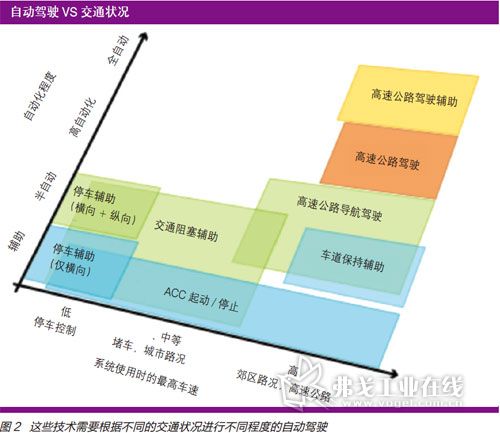
在这段大约5~10s的延迟时间里,所有的系统必须保持工作,以确保所有道路使用者的安全。因此,除了启用系统功能之外,高度自动化的驾驶还要考虑系统冗余、后备策略、安全方案,以及驾驶员和汽车制造商的法律责任。TRW测试未来驾驶辅助系统和半自动驾驶功能的第一步是软件模拟。之后软件会通过现有的硬件,集成到一个完整的结构中。在这一硬件在环的结构中,将人工生成的数据和真实环境下记录的数据注入系统,就能使其再现车辆的行动,之后再将其应用到车辆上。这些技术需要根据不同的交通状况进行不同程度的自动驾驶(见图2)。
真实环境测试就在道路上进行。TRW在德国科布伦茨的研发中心附近有十条“参考道路”。这些道路各具特色,比如交通密度、弯曲度、坡度、车道数、农村和城市路况等。TRW在一个项目中会进行重复2~3次的定义测试,然后公布研发项目中的统计结果。通过重复测试,工程师能够计算出系统发出错误警报的次数及正确报告的次数。
最后,也是最重要的一步是系统在不同情况和在极限温度下的测试,其中包括左撇子和右撇子的驾驶情况、阿尔卑斯山蜿蜒的山路、沙漠的干旱环境和北极地区的极冷环境,特别是摄像头,必须在广泛的光线和气候条件下进行测试。
未来即是现在
TRW正在与全球多个地区的汽车制造商合作,寻找引入半自动驾驶功能最有效的方式。不过可以肯定的是,半自动驾驶功能肯定会到来,并搭载于主流的汽车上。其中存在的挑战就是满足客户的期待和以可持续的方式来介绍这项技术,使这种技术能够被广泛接受。从紧急辅助到半自动驾驶最大的进步就是客户在每一次跨进车内起就能够体验到该技术带来的益处。
龚淑娟
李峥
热点文章
-

智能汽车场景化开发:系统融合与 用户体验的协同研究
2026-07-20
-

“泰钽”来了!开启智能越野3.0时代
2026-07-22
-

基于传动效率的多模复合功率分流混合动力系统模式控制研究
2026-07-21
-

乘用车混合动力总成系统设计和性能仿真研究
2026-07-22
-

动力系统主导车市质变,增程器迈入系统竞争
2026-07-23
-

基于深度学习的电驱实验系统设计
2026-07-24
-

-
基于深度学习的电驱实验系统设计
针对传统永磁同步电机建模方法难以兼顾精度与实时性的问题,本文基于深度学习技术提出一种融合物理约束的永磁同步电机降阶模型,通过深度神经网络实现对电机非线性电磁特性的精细化建模。围绕所提降阶模型,搭建了电驱实验系统,并将该模型集成至电驱系统中,实现了实时硬件在环验证。在不同工况下对降阶模型和传统dq轴解析模型开展实验分析,结果表明,所提出的基于深度学习的永磁同步电机降阶模型在保证高精度建模的同时,实现了更好的动态性能。该模型支撑的实验系统可用于电驱系统的快速仿真与控制算法研究,具有良好的工程应用前景。
作者:
-
动力系统主导车市质变,增程器迈入系统竞争
-
“泰钽”来了!开启智能越野3.0时代
-
乘用车混合动力总成系统设计和性能仿真研究
-
基于传动效率的多模复合功率分流混合动力系统模式控制研究
-
智能汽车场景化开发:系统融合与 用户体验的协同研究





评论
加载更多