ADAS系统的组成和主要功能
ADAS系统主要的功能在于感知道路环境以及做出相应决策上(执行由其他模块完成,不属于ADAS功能)。目前大部分主机厂的策略是自己研发决策算法,感知系统交给供应商做,少部分技术能力差的主机厂会采购一整套ADAS系统,只做集成,不做相应的功能开发。

目前市面上销售的车辆大多数搭载的是低成本的ADAS系统,感知模块主要由摄像头和毫米波前向雷达组成。毫米波雷达笔者了解不多,因此今天的介绍以摄像头为主。
01.ADAS系统
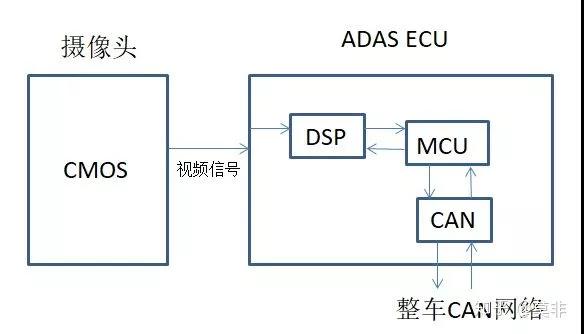
上图是ADAS系统的一个最基本的系统框图。由摄像头作为感知部件,将视频信号传输给ADAS ECU,在ECU内部,由DSP(数字信号处理器)进行图像识别处理,将识别到的物体信息发送给MCU(主处理器)。 主处理器对DSP信号做校验等最终处理后,根据客户要求不同,可以输出最后的决策给执行器,也可以只输出识别后的物体信息,由其他模块做出决策并执行。
02.感知

乘用车摄像头一般安装在内后视镜后面,挡风玻璃顶部的位置。摄像头硬件上比较重要的东西是镜头,CMOS元件,以及视频信号接口。由于体积限制,摄像头内部无法集成DSP和MCU,因此需要视频信号线将信息传递给ECU进行处理。
摄像头理论上可以把视频信号转换为CAN信号直接输出,但是CAN FD的速率无法满足如此大量的数据通信,因此低成本解决方案中还是需要使用视频信号线。
对于Tier1来说,如果DSP是外购的,那么一般镜头和CMOS需要采购DSP供应商指定的产品才可以。
摄像头的优点在于成本低,数据分析容易(雷达数据分析工程师哭晕在厕所),同时它的缺点也非常明显:测距,测速不够精确,识别能力受环境干扰影响比较大(雨雪天,炫光,挡风玻璃脏了,裂了等等),识别距离和广度无法兼顾等问题。目前的多目摄像头只解决了识别距离和广度,但是测距/测速的精度并没有太好的办法(图像畸变,坐标系转换的信息丢失,镜头热胀冷缩导致参数变化等原因)。
03.感知功能
目前主流的摄像头目标识别功能主要有以下几种:车辆及行人识别,车道线识别,交通标志识别,红绿灯识别,发光物体识别。非主流的有free space,大型动物识别,施工区域识别,非车辆的物体识别,车道转向标志识别等等。限于篇幅,今天只介绍主流的几种。
3.1 车辆及行人识别

车辆和行人是最主要的道路参与者,此功能是ADAS系统的重中之重。因此对于此类物体,有大量信号用来描述他们。主要信号有:纵向/横向距离,相对/绝对纵向/横向速度/加速度,类别,长度,高度,宽度,运动状态,所属车道等等信息。这些信号可以用来做AEB,ACC,TJA等功能。
3.2 车道线识别
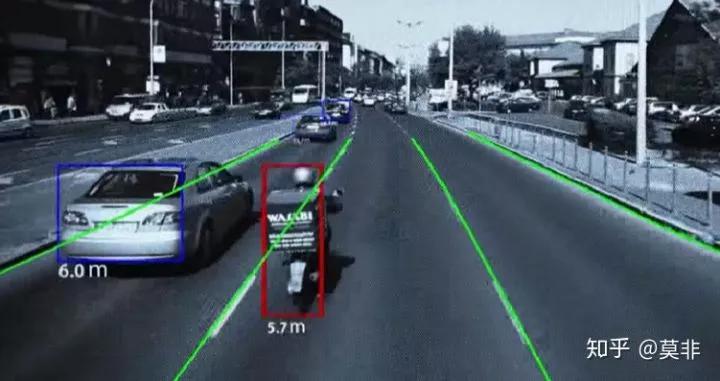
车道线识别是ACC,LKA,Lane centering,车道偏离预警的信号来源。目前车道识别的难点主要在于模糊不清的车道线,施工路段复杂的车道线,等情况。目前车道线都是使用三阶多项式来描述的。此方法的缺点在于无法描述S型曲线等较为复杂的车道线。三阶多项式描述的曲线代表的是车道线靠近本车一侧的边缘。
车道线识别的主要输出信息有:车道线起始/结束位置,本车距左右车道线横向距离,车道线曲率,车道线类型,车道线位置,分叉/合流位置等信息。
3.3 交通标志/红绿灯识别
交通标志/红绿灯识别在目前的应用主要是预警,暂时还没有量产车将这两项功能加入对车辆控制的干预上。识别内容亦清晰易懂,因此略过不提。
3.4 发光物体识别
此功能的主要用途是识别夜间的发光物体,如车灯,路灯,强反光物体等来自动控制远光灯的开启和关闭,以防亮瞎其他道路使用者的狗眼(强烈要求标配)。
配合矩阵式大灯,此功能的高端版还可以根据发光物的距离,控制光域,在不影响其他车辆的前提下获得尽可能大的视野。

04.决策
决策层面大家听的比较多,像ACC,AEB,LKA,Lane centering,TJA都是大家耳熟能详的功能,在此不再赘述。
几乎所有的主机厂在决策层面都是找供应商购买硬件,然后写入自己开发的算法。少部分技术实力稍差的主机厂会选择采购供应商的整套系统,只做系统集成。几乎所有的主机厂所说的拥有自主知识产权或者自主研发的ADAS系统都属于这种模式。对于此类算法,笔者没有从事过相关工作,不敢妄言。但是做过工程的朋友都清楚,工程中看起来很简单的事情(算法依靠视觉信号的输入判断加速/减速/刹车等操作),实际操作中都会碰到很多意想不到的问题。因此决策算法的含金量还是非常高的。
对于同时配备摄像头和雷达的系统,在决策前必须要经历一次数据融合,以保证算法输入的准确性。由于商业原因,笔者在此无法向大家详细介绍,只能说,数据融合并不是做一次简单的与运算,要复杂的多。
05.总结
ADAS系统的下放已是不可逆转的潮流,无人驾驶也已在赶来的路上。对于主机厂来说,虽然ADAS系统并不一定能提高多少销量,但是人有我无却会变成最大的黑点。
对于无人驾驶来说,摄像头无法适应恶劣的天气,毫米波雷达对横穿目标毫无办法,激光雷达成本无法负担,自动驾驶所需的计算能力对车规级硬件又是不小的挑战,但我相信,随着科技的进步,自动驾驶的实现,真的只是时间问题。
知乎
龚淑娟
李峥
热点文章
-

智能汽车场景化开发:系统融合与 用户体验的协同研究
2026-07-20
-

“泰钽”来了!开启智能越野3.0时代
2026-07-22
-

基于传动效率的多模复合功率分流混合动力系统模式控制研究
2026-07-21
-

乘用车混合动力总成系统设计和性能仿真研究
2026-07-22
-

动力系统主导车市质变,增程器迈入系统竞争
2026-07-23
-

基于深度学习的电驱实验系统设计
2026-07-24
-

-
基于深度学习的电驱实验系统设计
针对传统永磁同步电机建模方法难以兼顾精度与实时性的问题,本文基于深度学习技术提出一种融合物理约束的永磁同步电机降阶模型,通过深度神经网络实现对电机非线性电磁特性的精细化建模。围绕所提降阶模型,搭建了电驱实验系统,并将该模型集成至电驱系统中,实现了实时硬件在环验证。在不同工况下对降阶模型和传统dq轴解析模型开展实验分析,结果表明,所提出的基于深度学习的永磁同步电机降阶模型在保证高精度建模的同时,实现了更好的动态性能。该模型支撑的实验系统可用于电驱系统的快速仿真与控制算法研究,具有良好的工程应用前景。
作者:
-
动力系统主导车市质变,增程器迈入系统竞争
-
“泰钽”来了!开启智能越野3.0时代
-
乘用车混合动力总成系统设计和性能仿真研究
-
基于传动效率的多模复合功率分流混合动力系统模式控制研究
-
智能汽车场景化开发:系统融合与 用户体验的协同研究





评论
加载更多