知荐 | 固态激光雷达研究进展
激光雷达可以高精度、高准确度地获取目标的距离、速度等信息或者实现目标成像,在测绘、导航等领域具有重要作用。本文首先介绍了从机械式向全固态过渡的微机械系统激光雷达解决方案;其次针对激光雷达全固态的发展需求,介绍了面阵闪光、相控阵激光雷达的基本原理和典型实现方法,从液晶、光波导材料等研究方向阐述相控阵激光雷达研究现状;最后总结了目前激光雷达存在的问题及不同的解决方案,并对未来发展趋势进行了展望。
1 引言
雷达技术作为人类感知世界的“眼睛”,具备对于人类视觉范围以外、中远距离的环境感知的能力,在现代军事和民用领域都扮演着重要的角色。众所周知的毫米波雷达、微波雷达、超声波雷达等传统技术发展历程较长,技术相对成熟,激光雷达(LiDAR)相比传统雷达的工作频段,光频段的波长较短,因而可以极大提高雷达的距离分辨力、角分辨力、速度分辨力,并且得益于激光的高方向性和高相干性,可以实现远距离抗干扰探测与测距。激光雷达测距和测速具有不同的工作方式,测距一般可以通过飞行时间法和三角法实现,调频连续波的探测方法则可以实现速度、距离的同时测量。通过高灵敏的探测手段,可以精确获得目标的距离、速度等信息,在导弹制导、测绘、无人驾驶等领域发挥重要的作用。
通常激光雷达可以分为两大类:机械式激光雷达和固态激光雷达。机械式激光雷达采用机械旋转部件作为光束扫描的实现方式,可以实现大角度扫描,但是装配困难、扫描频率低。固态激光雷达,目前的实现方式有微机电系统(micro-electro-mechanical system,MEMS)、面阵闪光(Flash)技术和光学相控阵(optical phased array,OPA)技术。MEMS采用微扫描振镜,达到了一定的集成度,但是受限于振镜的偏转范围;Flash技术已有商用,但是视场角受限,扫描速率较低;OPA扫描技术是基于微波相控阵扫描理论和技术发展起来的新型光束指向控制技术,具有无惯性器件、精确稳定、方向可任意控制等优点,成为近年来研究的热点,液晶、集成波导光学相控阵等固态技术方法层出不穷。激光雷达在无人驾驶、机器人等人工智能领域也将向着小型化的趋势发展。
本文围绕激光雷达在智能等领域向着固态、小型化发展路线,综述了国内外的研究进展。第2部分简要介绍了激光雷达的工作原理;第3部分介绍了MEMS激光雷达技术原理及方案;第4部分介绍了Flash激光雷达技术原理及研究;为向更高集成度方向发展,第5部分着重介绍了OPA激光雷达技术原理及典型方案,具体从液晶(liquid crystal,LC)、电光材料、绝缘体上硅(Silicon on insulators,SOI)等材料平台分别介绍了近年来的研究现状。最后,第6部分对于所述的激光雷达技术方案作总结,比较其优缺点,总结发展趋势及做出展望。
2 基本原理
激光雷达可以高精度、高准确度地获取目标的距离、速度等信息或者实现目标成像。如图1所示是激光雷达的发射和接收在同一系统中的工作原理。激光通过扫描器单元形成光束角度偏转,光束与目标作用形成反射/散射的回波。当接收端工作时,可产生原路返回的回波信号光子到达接收器,接收端通过光电探测器形成信号接收,经过信号处理得到目标的距离、速度等信息或实现三维成像。可见,光束扫描器和探测系统的实现方式便是研究重点,需求从机械式向小型化全固态方向发展。
3 MEMS激光雷达
微机电系统(MEMS)可达到一定的集成化要求,引起了人们的广泛关注。如图2所示,目前已逐渐商用的MEMS激光雷达是采用微振镜结构进行激光束偏转,微振镜需要具有平整的光学镜面,将机械式激光雷达的旋转部件微缩,增加集成度。
二维扫描的MEMS微振镜是激光雷达的关键器件,主要可以通过电热效应、静电效应、电磁效应和压电效应驱动。有研究小组通过对电热双压电晶片驱动的微振镜加热,金属铝的形变大于介质硅,从而形成微结构的振动。实验可以施加电压2.3V,获得9°的偏转角。但是电热效应引起微振镜偏转通常响应速度较低,有实验通过施加12mW的电功率,响应速度只有74Hz。电磁效应驱动的MEMS系统需要在内部封装可动磁性物质或者可动线圈产生磁场,如图3所示,通过施加磁场形成洛伦兹力使得线圈产生偏转,从而驱动MEMS振镜偏转,响应速度可以超过10kHz。压电效应需要异质材料的介入,压电材料(PZT)具有高效率、响应速度快等优点。日本研究小组采用电镀的方法在硅上沉积PZT薄膜,加工形成MEMS结构并进行光学扫描,实验获得11.2kHz的响应速度,39°的视场角。静电效应驱动MEMS具有尺寸小、可单片全集成的优点,受到广泛研究。通常,采用静电效应驱动微反射镜的方式需要在真空环境下,以获得更高的驱动效率,10V电压驱动可以实现大约10°的扫描角度。瑞典KTH的研究小组近期验证了一种新方法,如图4所示,通过MEMS改变光栅周期实现衍射光角度偏转,在20V电压驱动下达到5.6°的扫描角度,功率消耗在微瓦量级。
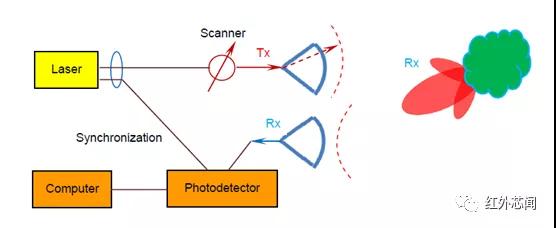
图1 激光雷达工作原理图
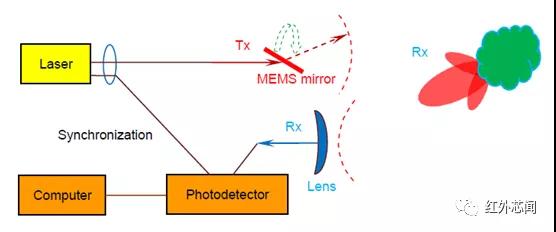
图2 MEMS激光雷达工作原理图
MEMS振镜用于激光雷达系统,需要具备大孔径以满足激光雷达分辨力等需求。静电驱动7mm直径尺寸的双轴可偏转MEMS振镜,采用简单易行的飞行时间(time of flight,TOF)的测距方法,测量了距离0.5m至80m的目标,视场角30°,扫描频率550Hz。如图5所示,为进一步提高LiDAR光学口径,采用2×7的微振镜阵列,等效综合口径334mm,填充因子80%,其中发射端信号是一维扫描的强度调制连续波,接收端是大孔径的振镜组,扫描角度60°,扫描频率250Hz。单个微振镜可以做到20mm的直径尺寸,实验验证在两个轴上均可以达到7.2°的光束扫描角度,压电驱动MEMS的谐振频率在1kHz左右,100W的激光能量没有对MEMS镜面产生破坏。
相控阵技术是MEMS实现激光雷达功能的另一个解决方案,其基本原理是,MEMS的微小移动产生光程差,多个具有不同相位的出射光束在远场干涉形成光束偏转。韩国Byung-WookYoo等人的研究小组对此方案进行研究,如图6所示,在硅基上制备具有8×8高对比光栅的MEMS结构相控阵,优化的性能表现为10V电压即可产生1.7π的相移,具有0.5MHz的响应速度,采用透镜系统扩大视场,测量得到远场总视场角为9.14°×9.14°。
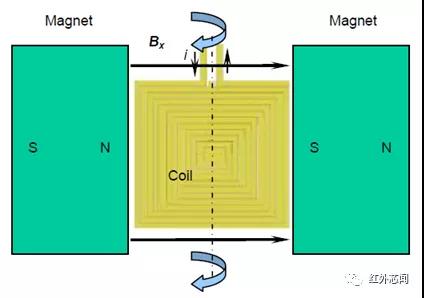
图3 电磁驱动MEMS结构图
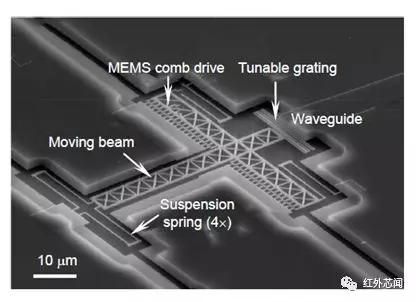
图4 MEMS驱动光栅电镜图
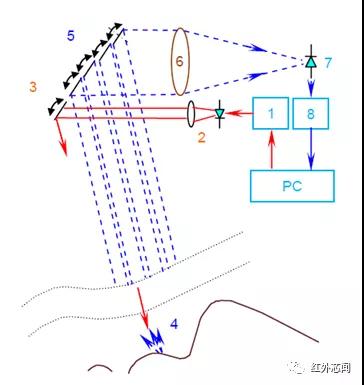
图5 大孔径MEMS激光雷达示意
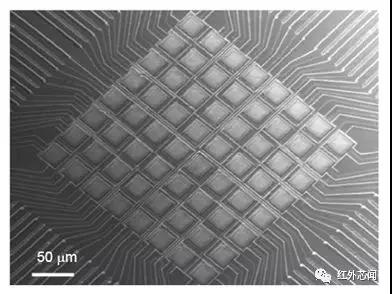
图6 8×8 MEMS光学相控阵芯片扫描电镜图
4 Flash激光雷达
20世纪90年代,有研究者就提出了非扫描式的激光雷达概念,属于3D成像激光雷达。如图7所示,Flash激光雷达采用类似照相机的工作模式,感光元件与普通相机不同,每个像素点可以记录光子飞行时间信息。发射的面阵激光照射到目标上,目标对入射光产生散射,由于物体具有三维空间属性,从而照射到物体不同部位的光具有不同的飞行时间,被焦平面探测器阵列探测,输出为具有深度信息的“三维”图像。如图8 所示,Flash激光雷达也经历了小型化发展历程,所占空间从起初的车厢级到办公桌级,再到现在的厘米级,这都得益于紧凑型激光器阵列、探测器阵列的发展。
2010年报道了3D Flash激光雷达的摄像机技术,进行多运动目标探测与跟踪应用,证实了概念的可行性。NASA有研究报道3D成像形式的Flash激光雷达可用于航天器在行星体的自动着陆,系统架构如图9所示,Flash激光雷达具有256×256像素点探测器,扫描速率30 Hz在模拟场景下进行1 km距离的相关测试。另外,在测绘领域,对不同地形、森林等环境进行探测,实验使用1064nm波长的Flash激光雷达,具备20°视场角,55Hz的帧速率。
Flash激光雷达的性能主要决定于焦平面探测器阵列,焦平面探测器阵列可以使用PIN型光电探测器,在探测器前端加上透镜单元并采用高性能读出电路可以实现短距离探测,系统如图10所示。对于远距离探测需求,目前满足需求的高性能的探测器—雪崩型光电探测器(avalanchephotodetector,APD),其探测的灵敏度高,可实现单光子探测,基于APD的面阵探测器具有远距离单幅成像、易于小型化等优点。
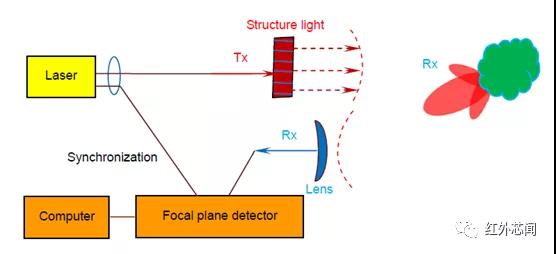
图7 Flash激光雷达工作原理图
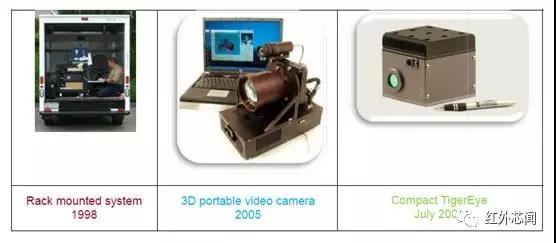
图8 Flash激光雷达小型化发展过程
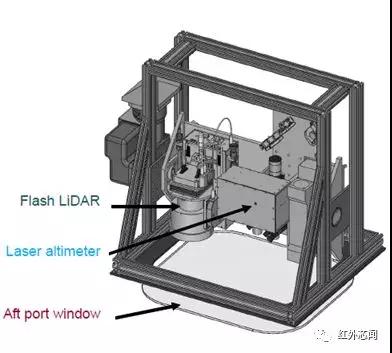
图9 Flash激光雷达框架图
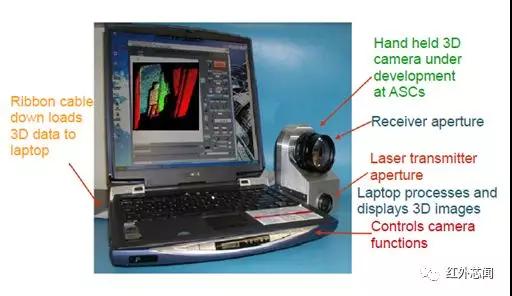
图10 Flash激光雷达系统
APD探测器分线性和盖革两种工作模式:线性模式雪崩光电二极管探测器(linear mode avalanche photodiode,LMAPD)和盖革模式雪崩光电二极管探测器(Geiger mode avalanche photodiode,GMAPD)。Lincoln实验室进行了可应用于激光雷达的面阵探测器的一系列研究。工作在可见光波段的32×32的GMAPD,并且集成了500 MHz的计时电路,可实现每秒5000∼10000次的成像速度,距离分辨率15cm。也报道了256×256面阵规模的GMAPD,如图11所示,将探测器单片混合集成到CMOS读出电路上,实现无源光子计数成像,经过30ms的多帧叠加,可以获得3.5km处较清晰的像。Raytheon公司报道了碲镉汞(HgCdTe)材料LMAPD阵列用于3D激光雷达探测,面阵规模可达到256×256,并验证了线性模式下单光子计数,从而可提供实时、远距离探测功能。
Flash激光雷达的距离分辨力和角度分辨力直接受限于探测器性能,为了实现远距离探测,焦平面阵列探测器需要价格昂贵的雪崩光电探测器(APD),更大面积、更高性能的探测器很难获得。为了解决Flash激光雷达分辨力受限的问题,韩国KAIST有研究小组提出采用偏振调制普克尔盒(polarizationmodulating Pockels cell,PMPC)和面阵微偏振电荷耦合器件(micro-polarizer charge-coupled device,MCCD)的方案,由于激光偏振态随着距离产生变化,MCCD可以探测回波的偏振态,计算得到距离,1024×1024个阵元数的MCCD可以弥补大面积的APD阵列的不足,获得较高的角分辨力。实验得到了0.12mrad的角分辨率和16m范围内5.2mm的距离分辨率。
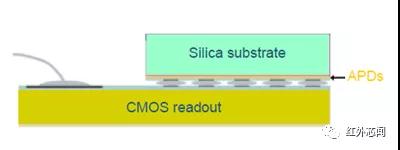
图11 混合集成成像器截面图
5 OPA激光雷达
高系统集成度的光学相控阵技术能够满足激光雷达在无人驾驶、无人机等领域全固态、小型化的发展需求。如图12所示,激光器功率均分到多路相位调制器阵列,光场通过光学天线发射,在空间远场相干叠加形成一个具有较强能量的光束。经过特定相位调制后的光场在发射天线端产生波前的倾斜,从而在远场反映成光束的偏转,通过施加不同相位,可以获得不同角度的光束形成扫描的效果,无需机械扫描。
5.1 液晶(LC)相控阵
McManamon等人研制出首个液晶材料的光学相控阵结构,液晶在全固态的激光雷达领域的应用得到了可行性的初步验证。如图13所示,通过外加电压改变液晶的取向,实现不同阵元的相位调节,可以获得远场光束的偏转效果。液晶的光学相控阵有驱动电压较小、易于大面积阵列集成的优点,目前较大规模商用的空间光调制器(spatial light modulator,SLM)得到了产业界的检验,有望应用在激光雷达领域。目前,液晶光学相控阵的最大扫描角度大约±10°,扫描速度在毫秒量级。研究者主要围绕如何增大响应速度、增加扫描精度等问题开展研究。David Engström等人为了弥补液晶光学相控阵的响应时间的不足,使用铁电液晶材料的空间光调制器,增大了液晶的响应速度,响应时间可达到200μs,控制电压范围±3.4V,光束偏转角达到±9°。
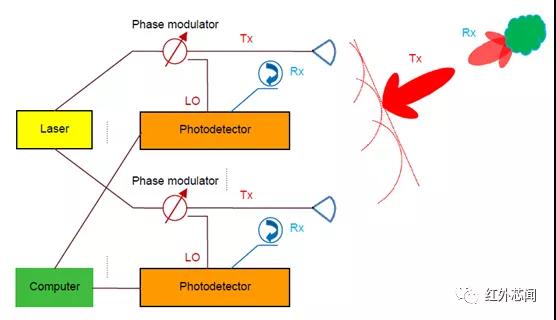
图12 OPA激光雷达工作原理图
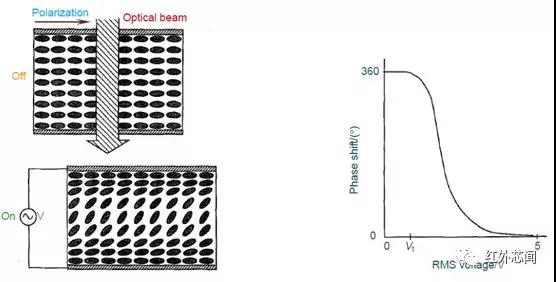
图13 液晶光学相控阵结构原理
液晶光学相控阵激光雷达具有很多优势,不需要机械扫描部件,有很大的潜力应用于现代新型激光雷达,但是液晶光学相控阵的扫描角度、扫描速度有待进一步提升,以使满足激光雷达在人工智能领域对于高速(百kHz量级以上)、大角度扫描(几十度以上)的需求。
5.2 集成光波导型相控阵
1972年,Meyer首次提出了使用钽酸锂(LiTaO3)这种单轴电光晶体材料制成的46通道波导相控阵。2π相移所需电压为32V,在各电极上加载合适的电压获得线形相位倾斜,可应用于一维扫描,验证了光学相控阵原理的可行性。
硅基半导体具有CMOS工艺兼容、集成度高、价格便宜等优点,如今绝缘衬底上的硅(silicon-on-insulator,SOI)是集成光学领域至关重要的晶圆之一。硅材料具有较高的热光系数,还具有等离子体色散的电光效应,硅基片上集成激光雷达也应运而生,迄今发展了约十年。南加州大学的SungWon Chung等人制作了1024 个阵元数的光学相控阵。这是目前阵元数较多的一维相控阵,采用标准180nm SOI工艺,主要给出了热光相位调制方向上获得45°的扫描角和0.03°的分辨角。采用的电压控制方式是一簇一簇的,从而只有136个独立控制电压,加热响应时间大约66μs。MIT的研究者则围绕在硅基上构造二维纳米天线结构对光学相控阵的方案进行了大量研究。他们在硅基上构造金属纳米天线结构,如图14所示,热光相移器与天线集成,采用高斯切趾的方法进行旁瓣压缩,实现π相移功率消耗8.5mW,可获得24°的视场角和1.6°的光斑分辨率,实验获得19dB的旁瓣压缩。
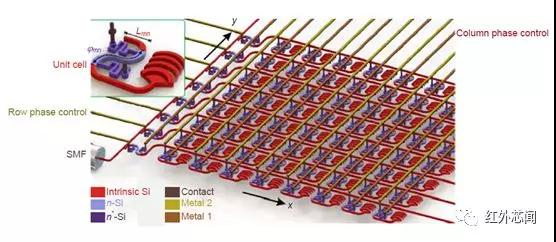
图14 二维硅基光学相控阵结构示意图
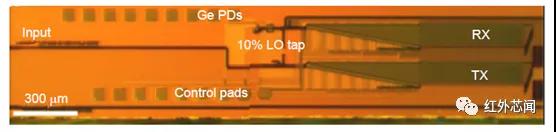
图15 硅基光学相控阵收发芯片显微镜图
光学相控阵芯片应用于LiDAR系统,需要进行目标的探测,得到目标的距离、速度等信息或对其进行成像。进而,有研究小组集成了光学相控阵独立收发器LiDAR 芯片,采用调频连续波(frequency modulated continuouswave,FMCW)方法进行信号探测,如图15所示。相移器分成三组分别进行电控制,以补偿一定的加工误差和获得一定的调制精度。二维扫描的水平方向为热调制相位,垂直方向为波长调制,测得远场扫描角度46°×36°,光斑角分辨率是0.85°×0.18°,实验探测了三个不同角度上的物体,探测2m的距离范围,距离精度20mm。法国有研究小组在硅基上采用光开关进行延迟线,从而控制不同的非连续扫描角度。片上集成平衡探测器研究FMCW的探测方式,采用外接光纤这种长延迟线,以5mW的光功率输出测试到了60m远的移动物体,指出远距离目标探测精度对于延迟线的长度提出了更高要求。除了激光器和外部光纤,整个芯片尺寸约9mm×9mm。南加州大学的研究报道了单片集成8×8 相控阵列收发芯片,如图16所示。与MIT小组同样采用的是热光效应纳米天线的相移器。27.2mW的电功率损耗即可获得2π相移,获得了12dB的边模抑制比,测试得到二维成像效果,可应用于激光雷达成像。
硅基集成光学芯片可实现大规模集成激光器、调制器、放大器、光学天线等结构单元,此解决方案使得激光雷达具有全固态、小型化、低功耗、低成本等优势。目前主要集中于如何有效地减小阵列串扰、提高扫描精度、增大扫描角度、提高热稳定性等问题而且由于片上光功率较低,使得远距离探测存在困难。
6 总结与展望
响应速度、驱动电压、旁瓣压缩等底层技术指标分别影响了激光雷达系统的扫描速度、功耗、视场角等性能。提升材料的响应速度将提高系统的扫描速度;驱动电压的减小将有利于系统功耗的整体降低;OPA的旁瓣压缩技术将提高系统的视场角,获得更大的扫描范围;分辨力的提高将使得系统能够更好地分辨目标的细节,不同方案的激光雷达性能对比如表1所示。
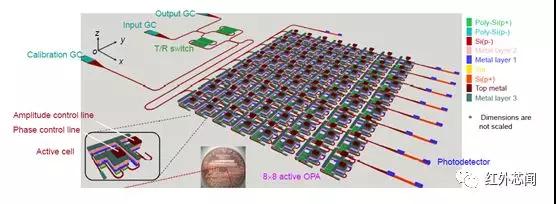
图16 单片集成8×8光学相控阵收发器示意图
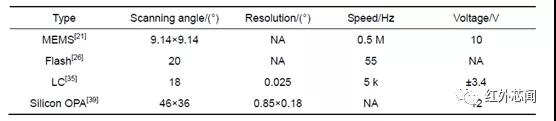
表1 不同类型的激光雷达芯片性能对比
机械式激光雷达存在精密装配困难、系统庞大等缺点,目前价格仍然居高不下。为了突破这一缺陷,研究者们提出了诸多的解决方案。20世纪90年代开始出现Flash 3D成像激光雷达,也出现了通过液晶实现的首个光学相控阵结构,21世纪初出现了MEMS类型的激光雷达组件,迄今各种方案竞相追逐,不断发展。MEMS器件作为机械式向固态LiDAR过渡的解决方案,具有一定程度的小型化、响应速度较快的特点,且MEMS功能性结构能够忍受热压,因此可以承受相对较高的激光能量,但是由于MEMS结构单元尺寸较大,存在机械振动、旋转,受环境因素影响较大。针对全固态激光雷达发展需求,Flash激光雷达可对目标一次照射成像,成像质量最终取决于面阵探测器的性能,但是数据庞大,一次成像速度较慢。液晶光学相控阵器件在空间光调制器领域商业化应用成熟,具有全固态、便宜、可大面积制作等特点,但是响应速度较慢、光束可偏转角度较小。数十年来,集成光波导相控阵芯片作为全固态、小型化LiDAR最有潜力的解决方案得到了广泛的研究,硅基光学相控阵激光雷达具有CMOS兼容的特点,价格便宜,但是热光效应的扫描速度仍有待提升,可以采用硅基等离子体色散效应的相位调制器来满足更高速的应用需求。从目前相控阵芯片性能来看,光学相控阵天线的大规模集成将增大激光雷达的光学孔径,提高分辨力,但是,大规模片上激光雷达尺寸根本上是受限于电压控制单元的电极引线总体尺寸,相控阵列数越多,电极排布越困难,可以通过电极多层分布的方式解决此问题。
目前在研究比较热门的车载激光雷达领域,成熟商用的激光雷达大多是机械式激光雷达,行业龙头Velodyne公司成立于1983年经过多年机械雷达研究的积累,行业地位很难动摇。Leddar Tech公司是MEMS激光雷达的代表性公司。国内的激光雷达公司大多成立不久,镭神智能、北科天绘、速腾聚创、禾赛科技等大多在机械式激光雷达方案上不断改进,在MEMS激光雷达领域有所涉及但仍未大规模商用;北醒科技、光珀智能、华科博创等国内公司在Flash激光雷达领域也不断推出产品。Quanergy公司将相控阵激光雷达代入商业视野,正研发适用于车内传感系统和无人驾驶汽车的全固态激光雷达。
总之,大功率、大扫描角度、高分辨力等高性能参数的全固态、小型化激光雷达的实现仍然需要进一步的研究。随着现代半导体技术、材料技术日新月异的发展,加工工艺更加精密、集成规模更大,相信在不久的将来一定能够实现全固态、小型化的激光雷达在智能领域的商业化应用。
《光电工程》2019年第7期
龚淑娟
李峥
热点文章
-

智能汽车场景化开发:系统融合与 用户体验的协同研究
2026-07-20
-

“泰钽”来了!开启智能越野3.0时代
2026-07-22
-

基于传动效率的多模复合功率分流混合动力系统模式控制研究
2026-07-21
-

乘用车混合动力总成系统设计和性能仿真研究
2026-07-22
-

动力系统主导车市质变,增程器迈入系统竞争
2026-07-23
-

基于深度学习的电驱实验系统设计
2026-07-24
-

-
基于深度学习的电驱实验系统设计
针对传统永磁同步电机建模方法难以兼顾精度与实时性的问题,本文基于深度学习技术提出一种融合物理约束的永磁同步电机降阶模型,通过深度神经网络实现对电机非线性电磁特性的精细化建模。围绕所提降阶模型,搭建了电驱实验系统,并将该模型集成至电驱系统中,实现了实时硬件在环验证。在不同工况下对降阶模型和传统dq轴解析模型开展实验分析,结果表明,所提出的基于深度学习的永磁同步电机降阶模型在保证高精度建模的同时,实现了更好的动态性能。该模型支撑的实验系统可用于电驱系统的快速仿真与控制算法研究,具有良好的工程应用前景。
作者:
-
动力系统主导车市质变,增程器迈入系统竞争
-
“泰钽”来了!开启智能越野3.0时代
-
乘用车混合动力总成系统设计和性能仿真研究
-
基于传动效率的多模复合功率分流混合动力系统模式控制研究
-
智能汽车场景化开发:系统融合与 用户体验的协同研究





评论
加载更多