自动驾驶思考:仿真系统构建
图片来自网络
▌如何构建自动驾驶仿真系统?
仿真最主要的目的是:通过模拟真实环境和构建汽车模型,找出自动驾驶过程中可能出现的问题。
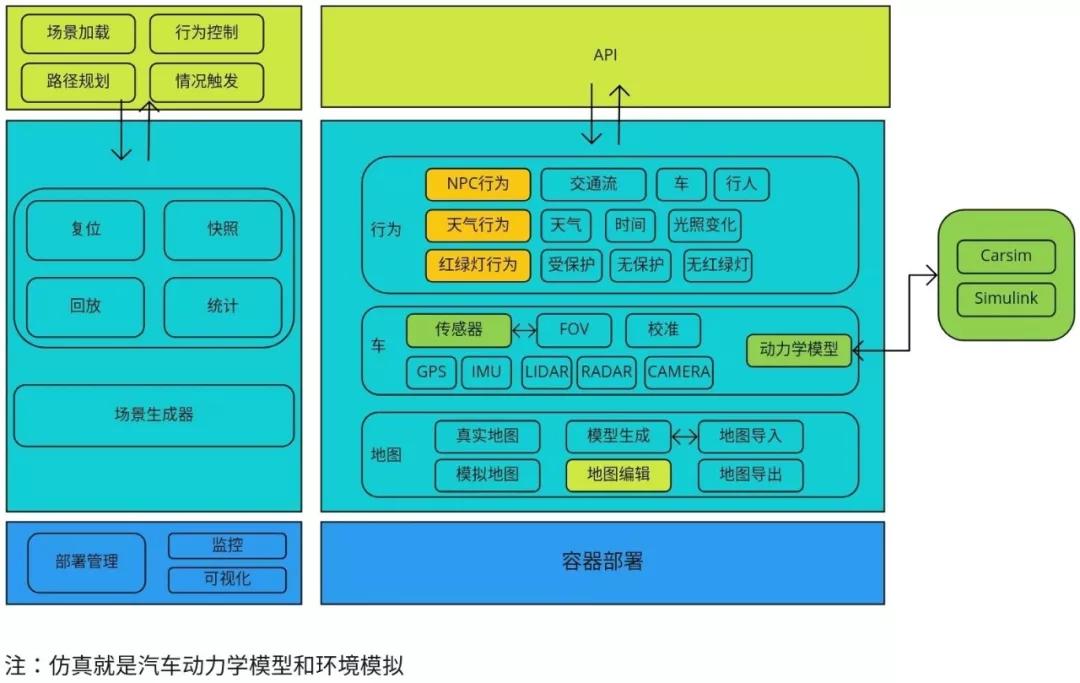
那么如何构建自动驾驶仿真系统呢?目前主流的实现方式是通过游戏引擎来模拟真实环境,通过 CarSim 等软件构建汽车的动力学模型来实现自动驾驶仿真。下面我们先看下自动驾驶仿真系统的整体结构。
我们需要自动驾驶仿真系统满足:
场景丰富
接口灵活
恢复快速
部署方便
▌场景
首先我们关注仿真器本身,仿真器无非是模拟支持各种场景,其中场景分为:可以定义的场景和随机场景。可以定义的场景又分为:单元场景和真实场景。
下面我们分别介绍下这几种场景:
可定义的场景: 主要是针对驾驶过程中遇到的不同情况,比如会车,超车,红绿灯,变道等,这些场景一般都比较简单,类似于单元测试,主要是测试单个场景是否能够满足要求,这一部分业界已经有规范,可以参考 openscenario [1] 。拿超车的场景举例子,可以创建一辆 NPC 车辆在本车的前面,在不同的速度和距离条件下,测试本车超车是否成功。
真实场景:复现真实场景中遇到的问题,比如真实路测过程中遇到问题,需要复现当时的情况,并且验证问题是否已经解决,可以回放真实场景的数据来进行测试。
随机场景:这种场景类似于路测,模拟真实环境中的地图,并且随机生成 NPC,天气,交通情况等,模拟汽车在虚拟的环境中进行路测,由于可以大规模部署,可以快速的发现问题。
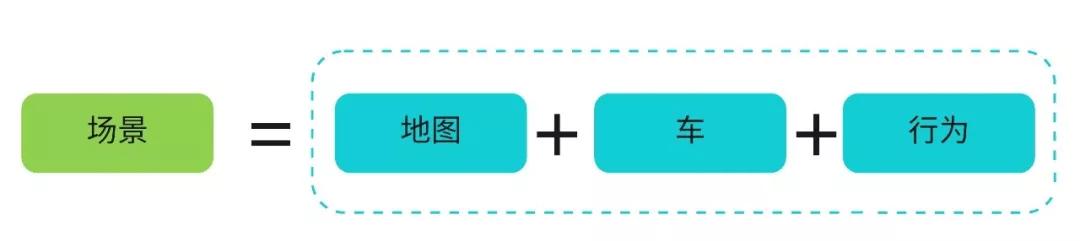
我们可以看到不管是哪个场景,都是"地图+车+行为"的模式,场景的需求复杂多变,因此能够灵活的加载地图,车和行为就成为仿真器易用性的关键。
我们的需求是能够根据不同的要求创建不同的场景,动态的添加地图,车和行为。场景生成器是一个框架,支持通过不同的配置,动态创建不同的场景,来满足我们的要求。除了场景生成器,我们还需要仿真器具备以下几个基本功能:
复位 - 在故障发生之后,我们能够复位环境和车辆到初始状态,同时也要求我们能够复位对应的自动驾驶系统。这样在每次故障后,可以不用人工操作,而自动恢复测试。
快照 - 能够生成对应帧的信息,保存快照的好处是能够恢复事故现场,同时也可以用于自动驾驶数据集的建设。保存的点云和图片有 groundtruth,可以作为机器学习的输入来训练模型。
回放 - 回放功能主要是用于故障定位,在发生碰撞之后,回放信息用于定位问题。
统计 - 统计主要是用于作为 benchmark,来衡量系统的稳定性。
有了这些基础功能还不够,我们还需要关心具体的场景,下面我们分别对地图、车以及行为来详细描述需要实现的具体功能:
▌地图
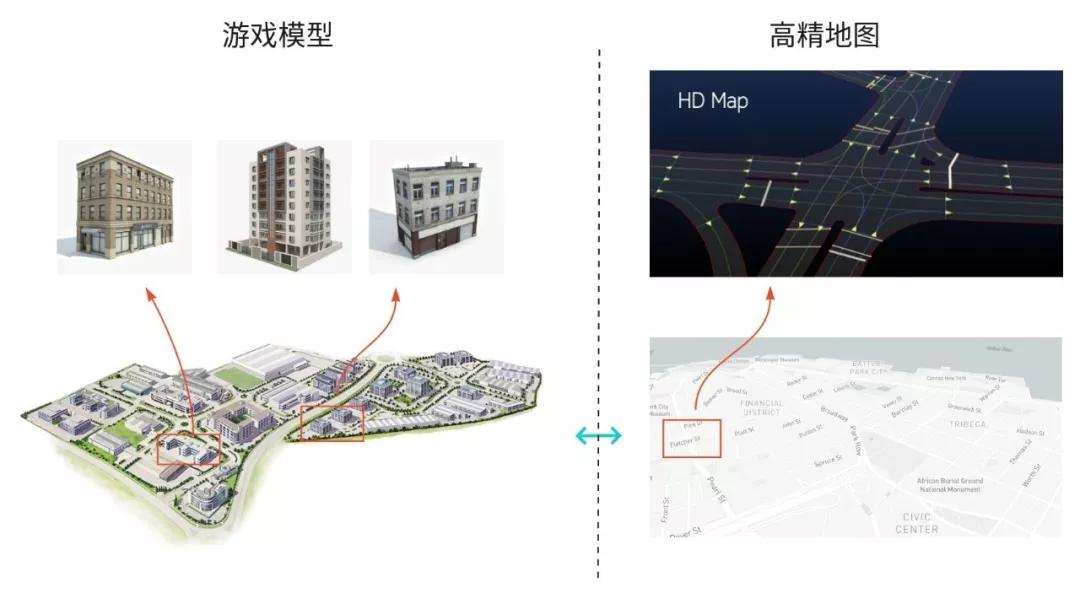
地图是场景中第一个需要考虑的,地图包括2部分,其中一部分是游戏中的模型,另外一部分是这些模型的高精度地图。换一种说法就是,首先我们需要在游戏中构建一个1:1的虚拟世界,然后再绘制出这个世界的高精度地图。其实游戏中的模型是游戏引擎的需求,游戏引擎是根据模型来渲染游戏画面的,没有模型也就渲染不出地图。而高精度地图是自动驾驶系统所需要的,高精度地图可以采用根据现场绘制的地图,也可以先得到游戏模型,然后在模型中绘制。下面是游戏中的地图和高精度地图的对应关系。
1. 真实场景地图生成
① 地图模型制作:
游戏中地图模型的制作相对来说是工作量比较大的工作,涉及到以下2点:
单个模型制作 - 单个模型包括地图中的建筑物、道路、树木、信号灯、交通牌、以及其他的信息。这些信息如果是要完全模拟真实环境,需要大量的材质和贴图,一般是在 maya 和 3d-max 等软件中建模,然后再导入模型到游戏引擎中使用。
地图布局 - 有了单个模型,当需要把单个模型组合成地图的时候,首先需要解决的是道路的位置信息,比如这个道路有多长,道路的曲率是多少?比较简单点的方法是直接导入2维地图(百度,高德,OSM),然后对照着2维地图放模型,最后生成整个地图的布局。而实际的问题是2维地图的精度往往达不到要求,国内的地图还加入了 GPS 偏置,所以生成的地图布局必定会不太准确。
② 高精度地图制作:
根据模型生成地图 - 接着上面的地图布局来讲,虽然得到的地图布局不准确,但是我们再根据游戏中的模型布局,绘制出高精度地图,然后把这个高精度地图给自动驾驶系统使用,基本上也能满足我们的要求。
根据地图生成模型 - 上述的问题就是游戏中的真实位置和实际道路的位置有轻微的误差。要解决上面的问题,我们可以反其道而行之,先生成高精度地图,即根据真实环境先绘制出高精度地图,然后再把高精度地图导入游戏引擎,动态的生成模型,这个方案的好处是地图100%是真实场景,而且不需要在游戏引擎中重新绘制高精度地图,坏处是建筑的模型无法生成。
关于真实场景的地图生成,目前还没有一个比较完美的解决方案,都需要大量的工作。下面我们再看下虚拟场景的地图生成。
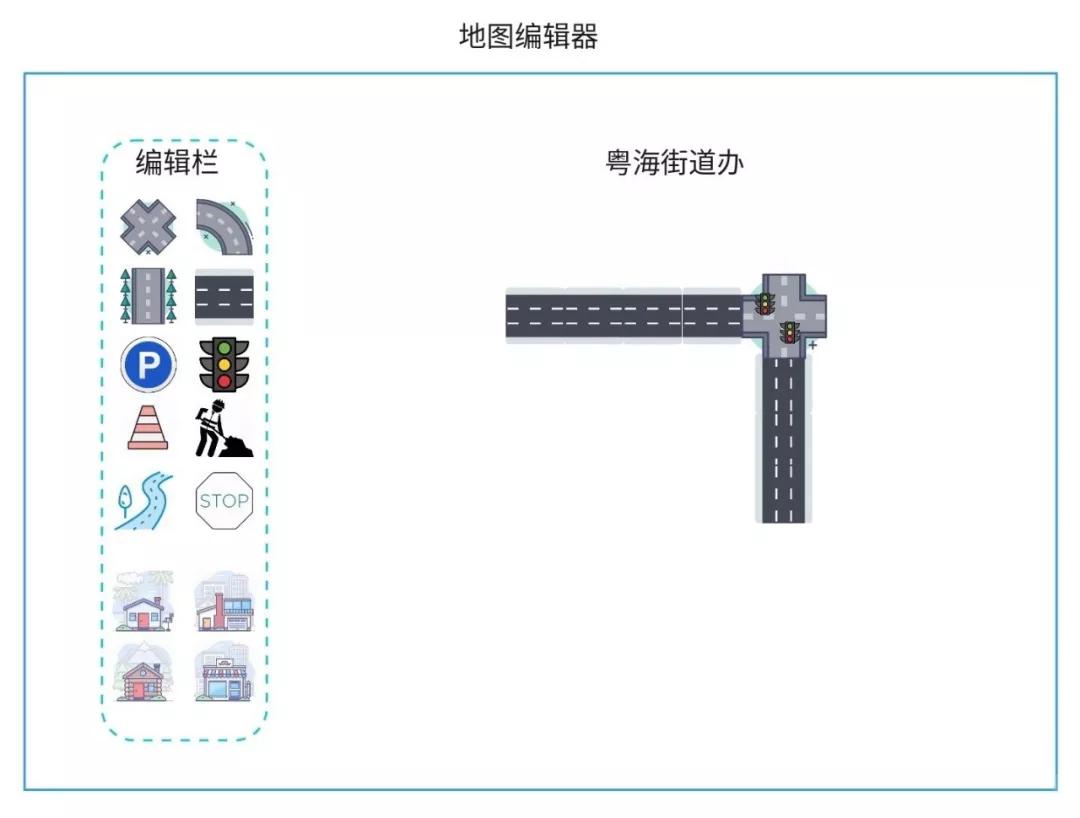
2. 虚拟场景地图生成
虚拟场景的道路生成就比较简单,主要的应用场景是一些园区,或者一些测试场景。这一部分完全可以制作一个地图编辑器,类似游戏中的地图编辑器,玩家可以根据自己的需求创建游戏中的地图,然后再由脚本动态的生成高精度地图。这部分的功能主要是对标 Carsim 等仿真软件的地图编辑功能。
说完了地图,接下来看下车。
▌车
车主要分为2部分:车的动力学模型,以及传感器。接下来我们详细分析下这2部分:
车的动力学模型 - 这一部分是传统仿真软件的强项,由于应用已经非常成熟,游戏中的汽车动力学模型都比较简单,由于 CarSim 等软件没有开源,所以目前短期内一个比较好的解决方案是,仿真器提供 API 接口,调用 CarSim 和 Simulink 等软件的动力学模型,实现对汽车的模拟。
传感器 - 传感器主要是 GPS、IMU、LIDAR、RADAR、CAMERA 等,涉及到传感器的位置,校准参数等。当然这一部分也可以仿真传感器视野范围 ( FOV ),也可以仿真传感器的校准算法。
▌行为
现在我们加载了地图,车辆,接着我们需要定义一些行为来模拟真实世界。
1. NPC
NPC 包括行人和车辆。
行人 - 目前主要是模拟行人过马路,以及在路边行走,以及更加复杂的场景,例如下雨天打伞的行人,对于这些异常场景,感知模块不一定能够正常识别。
车辆 - 车辆的行为可以由一些简单的行为来模拟复杂的行为,例如停车,变道,加速,减速,来组合出超车,会车等复杂行为。也可以通过模拟真实情况的交通流数据,来模拟整个行为。前一种测试的行为比较成熟,后一种需要根据实际的情况提取出行为,再加入补全信息,才能够正常工作。
2. 天气
天气主要是影响传感器的感知,最主要的就是摄像头。对 LIDAR 的影响由于目前没有阅读相关平台是否有加入噪声,这里就先不展开了。
天气 - 雨、雪、雾、云层 调整不同的比率来模拟不同的天气情况对传感器的影响,云层主要是会影响光照变化,多云投射的阴影对车道线识别等会有影响。
时间 - 白天和夜晚不同光照场景下对传感器的影响。
3. 红绿灯
这一部分可以归纳为交通信号的行为,其中分为:
有保护的红绿灯 - 各大城市是最普遍的,即有箭头的红绿灯,根据对应车道的红绿灯直行或者拐弯。
无保护的红绿灯 - 即圆形的红绿灯,对面可以直线的同时,你可以拐弯,需要注意对面直行的车辆,选择让车之后再拐弯。
无红绿灯 - 这种常见于郊区路口,需要判断有没有车辆经过而让行或者停止,然后再通过路口。
关于仿真器就介绍完毕了,那么我们如何控制仿真器来实现这些呢?
▌API
目前主要是通过 python API 的方式来控制仿真器加载模型,控制仿真器的行为。好处是不用图形界面手工操作,可以实现自动化部署。API 的主要是根据上述所说仿真器的功能实现统一的接口,实现交互。
▌部署
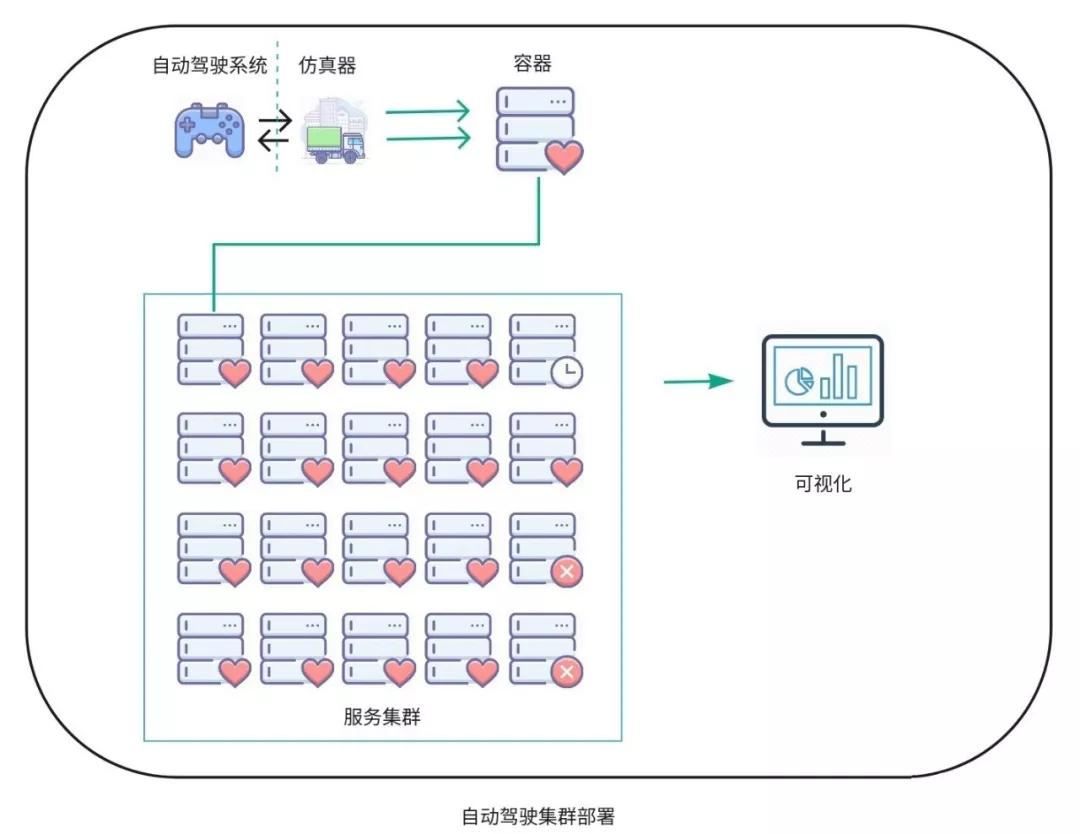
为了提高测试效率,我们还需要大规模部署,一个比较好的方式是通过容器化的方式部署。针对于多台机器,一个显而易见的需求就是创建一个管理平台来实现对仿真器的管理。容器部署平台可以监控对应仿真器的状态,并且提供可视化的配置界面,生成和部署不同的场景。
监控 - 可以监控仿真器的监控状态,显示正常和有问题的集群,保存日志,维护集群的稳定。
可视化 - 首先是配置可视化,可以方便的选择不同的配置(不同的地图,车,行为)来生成不同的场景,其次是通过可视化反馈仿真结果,屏蔽仿真集群的细节,使用起来更加直观方便。
▌总结
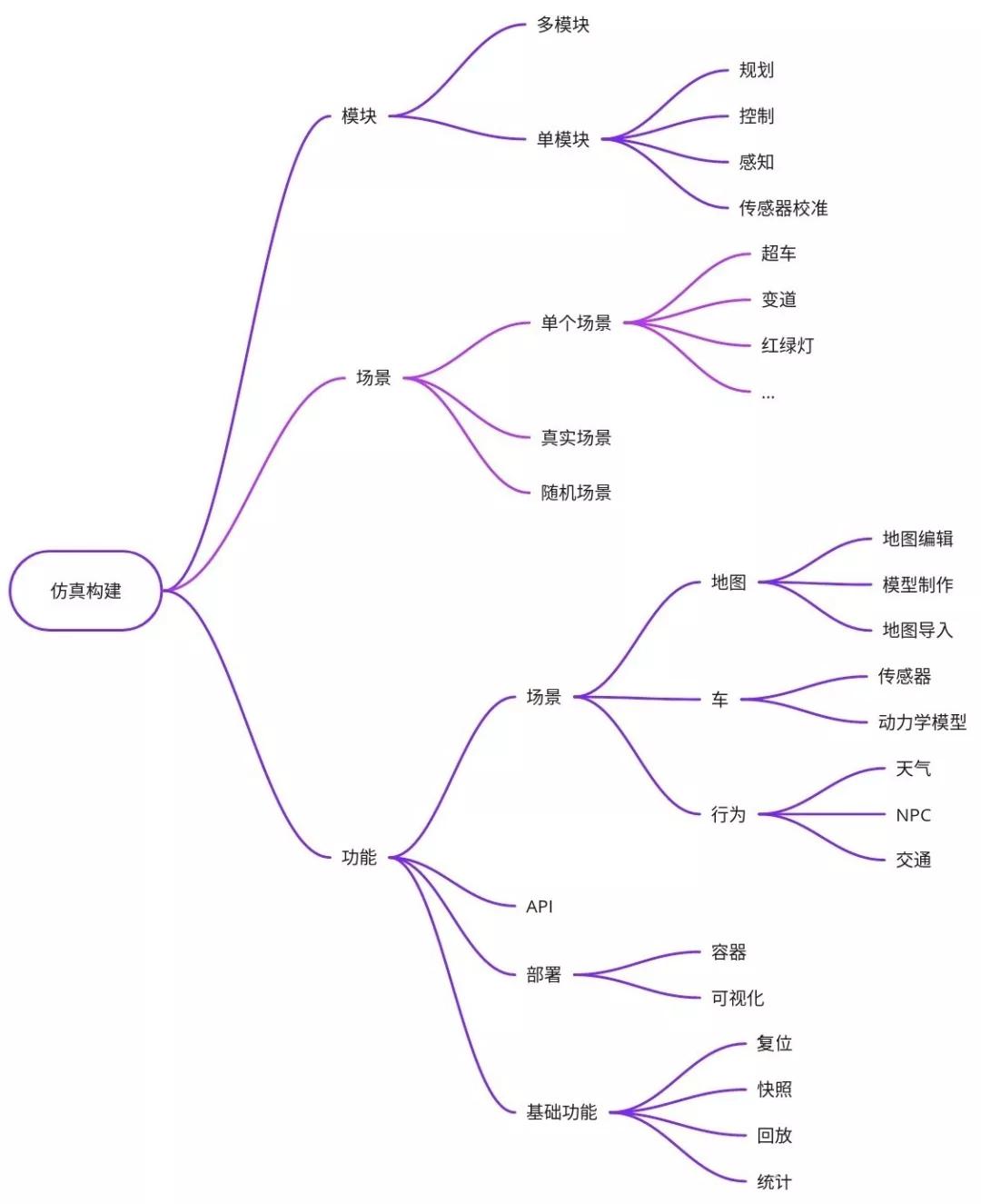
最后根据功能划分,我们可以单独仿真自动驾驶系统的规划控制模块,也可以单独仿真感知模块,可以仿真传感器校准,也可以端到端的仿真所有模块。可以仿真单个受限的场景,也可以仿真整个地图。总之,仿真系统需要提供灵活的场景生成框架,统一的 API 接口,以及大规模部署的能力。
▌参考资料
openscenario
http://www.openscenario.org
作者介绍
王方浩,前蚂蚁金服高级软件工程师。一直从事软件相关工作,是操作系统、大数据、自动驾驶相关技术的爱好者。
DataFunTalk
龚淑娟
李峥
热点文章
-

智能汽车场景化开发:系统融合与 用户体验的协同研究
2026-07-20
-

“泰钽”来了!开启智能越野3.0时代
2026-07-22
-

基于传动效率的多模复合功率分流混合动力系统模式控制研究
2026-07-21
-

乘用车混合动力总成系统设计和性能仿真研究
2026-07-22
-

动力系统主导车市质变,增程器迈入系统竞争
2026-07-23
-

基于深度学习的电驱实验系统设计
2026-07-24
-

-
基于深度学习的电驱实验系统设计
针对传统永磁同步电机建模方法难以兼顾精度与实时性的问题,本文基于深度学习技术提出一种融合物理约束的永磁同步电机降阶模型,通过深度神经网络实现对电机非线性电磁特性的精细化建模。围绕所提降阶模型,搭建了电驱实验系统,并将该模型集成至电驱系统中,实现了实时硬件在环验证。在不同工况下对降阶模型和传统dq轴解析模型开展实验分析,结果表明,所提出的基于深度学习的永磁同步电机降阶模型在保证高精度建模的同时,实现了更好的动态性能。该模型支撑的实验系统可用于电驱系统的快速仿真与控制算法研究,具有良好的工程应用前景。
作者:
-
动力系统主导车市质变,增程器迈入系统竞争
-
“泰钽”来了!开启智能越野3.0时代
-
乘用车混合动力总成系统设计和性能仿真研究
-
基于传动效率的多模复合功率分流混合动力系统模式控制研究
-
智能汽车场景化开发:系统融合与 用户体验的协同研究





评论
加载更多