车载补盲激光雷达点云质量评价方法研究
0 前言
在自动驾驶场景中,精准的环境感知是实现安全驾驶的基础。激光雷达作为核心传感器之一,对于车辆的环境感知起着至关重要的作用,其中补盲激光雷达能够有效填补主雷达的盲区,为自动驾驶系统提供更全面的环境信息。
然而,由于激光雷达的工作原理、环境因素以及自身性能等多方面影响,点云数据可能存在噪声、缺失以及不准确等问题。例如,在恶劣天气(如雨、雪和雾等)条件下,激光束的传播会受到干扰,导致点云数据质量下降。不同品牌和型号的激光雷达,其硬件性能和算法差异也会使得点云质量参差不齐。准确评估点云质量,能够帮助自动驾驶系统更好地利用激光雷达数据,提高决策的准确性和可靠性,提供强有力的选型依据。
为此,本文详细介绍了一种针对车载补盲激光雷达的点云质量评价方法。
1 评价体系
1.1 测距精度
测距精度是衡量激光雷达点云质量的重要指标之一,它直接影响到点云数据中每个点的空间位置准确性。在实际应用中,测距精度的误差可能导致对目标物体的距离判断错误,进而影响自动驾驶系统的决策。为了评估距离精度,采用高精度的标准反射板作为目标,将其放置在不同距离处,让激光雷达进行扫描。
统计出的距离采用均方根误差(RMSE)来评估测距精度,计算公式为:
式中,n为测试点数;di为真实距离; 为测量得到的距离。
为测量得到的距离。
RMSE值越小,表明测距精度越高,点云数据中各点的距离信息越准确。
1.2 点云密度
点云密度反映了单位空间内点的数量,对自动驾驶系统准确感知周围环境的细节起着关键作用。在实际道路场景中,不同距离的点云密度需求各异。对于车辆近距离范围内,较高的点云密度能帮助系统更精确地检测行人、车辆等目标的位置和姿态,为紧急制动或避让决策提供充足的信息。
使用网格划分法将激光雷达的视场空间划分为大小相等的三维网格,统计每个网格内的点云数量,如图1所示。
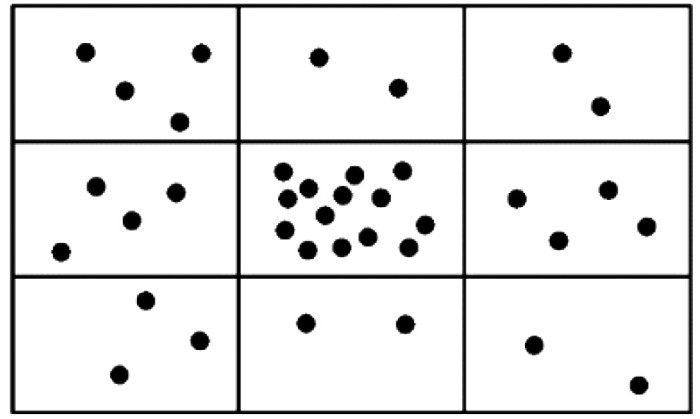
图1 视场空间划分后的点云平面示意
通过计算单位体积内的点云数量,得到点云密度。点云密度公式为:

式中,D为点云密度;N为总点数;V为空间体积。对于测距范围较小的补盲激光雷达,可采用较小的网格尺寸,以更细致地反映点云分布情况。
1.3 角度精度
角度精度是车载激光雷达准确感知目标物体方位的关键指标。本文采用旋转目标法来评估角度精度。将激光雷达固定在高精度转台上,旋转转台,使激光雷达对固定目标进行扫描。通过比较激光雷达测量的目标角度与转台实际旋转角度之间的差异,来评估角度精度。角度偏差计算公式为:

式中,∆R为角度偏差;Rmeasured为激光雷达测量的目标角度;Ractual为实际旋转角度。
1.4 反射率精度
反射率精度反映了激光雷达对目标物体表面反射特性的测量准确性,对于识别不同材质的物体具有重要意义。在自动驾驶场景中,不同物体的反射率不同,通过准确测量反射率,自动驾驶系统可以更好地识别道路标志、交通信号灯及车辆等目标。
在点云数据中选取符合朗博体特性的标值反射率目标物体的多个点,获取这些点的反射率值。计算这些反射率值的标准差,标准差越小,说明反射率精度越好。反射率精度计算公式为:
式中,σr表示反射率精度指标;Ri表示第i 个点的反射率; 表示反射的平均值,n表示选取的点的数量。
表示反射的平均值,n表示选取的点的数量。
1.5 评价模型
在建立综合评价模型前,先基于层次分析法(AHP)确定各评价指标的权重。层次分析法是一种将复杂问题分解为多个层次,通过两两比较确定各因素相对重要性的方法。在本方法中,由智能驾驶感知算法的专家对各指标进行两两比较,构建判断矩阵。通过计算判断矩阵的特征向量和特征值,得到各指标的相对权重,科学地反映各指标在点云质量评估中的重要程度,为综合评估提供依据。
确定了指标权重和各指标的评估值,即可构建综合评估模型。采用加权求和的方法,将各指标的评估值乘以其对应的权重后相加,得到点云质量的综合评估值。公式为:

式中,Q为点云质量综合评估值;W1、W2、W3、W4分别为测距精度、点云密度、角度精度和反射率精度这4个指标的权重;I1、I2、I3、I4分别为这4个指标的评估值。通过此综合评估模型,可以将多个指标的评估结果整合为一个综合值,全面、直观地反映车载激光雷达点云的质量水平,为自动驾驶系统对激光雷达性能的评估提供量化依据。
2 试验平台搭建
2.1 激光雷达选型
选用某未上市的固态补盲激光雷达样机作为验证对象。该激光雷达采用FLASH扫描技术,水平视场角为120°垂直视场角为70°,对10%反射率的目标物,最远可探测距离30m,能够有效覆盖车辆周围的盲区。在点频和帧频方面,点频为43万点/s,帧频为10Hz,能够快速获取周围环境的点云数据,为实时性要求较高的自动驾驶场景提供支持。该型号激光雷达在硬件性能上表现良好,适合作为本次试验的研究对象。
2.2 数据采集与处理系统
为了准确采集和处理激光雷达的点云数据,本文使用了一套数据采集与处理系统。该系统主要包括数据采集卡、计算机和基于CloudCompare二次开发的数据处理软件。数据采集卡负责采集激光雷达输出的点云数据,并将其传输到计算机中。计算机配备了高性能的处理器和大容量的内存,能够快速处理大量的点云数据。
点云数据处理软件如图2所示,负责控制激光雷达的工作参数,如扫描频率、发射功率等,并实时采集激光雷达输出的点云数据。该软件集成了多种算法,包括点云滤波、去噪、配准、分割以及目标识别等,能够实现对点云精度、密度、完整性以及噪声和异常点的全面评估。同时,该软件还具备可视化功能能够将处理后的点云数据以三维图形的形式展示出来直观地呈现点云质量的评估结果。通过这套数据采集与处理系统,能够高效、准确地获取和处理激光雷达的点云数据,为点云质量评估提供有力支持。
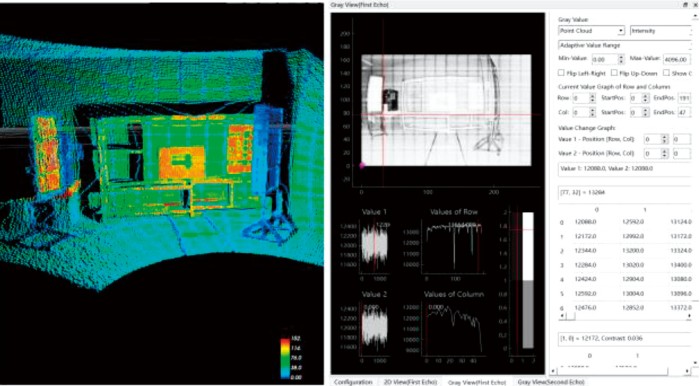
图2 点云数据采集软件界面示意
2.3 室内试验环境搭建
考虑到补盲激光雷达探测范围较短这一特性,同时尽可能排除外界环境干扰,在室内搭建暗室环境进行试验。暗室内部墙面、地面和天花板均覆盖黑色吸光材料,反射率低于10%,有效减少激光的反射和散射,避免对测量结果产生干扰。在暗室内设置含有多个固定距离测量点的滑轨,用于放置目标物体和辅助测量设备,确保试验条件的一致性和可重复性。暗室环境能够提供稳定、可控的试验条件,有利于准确测量激光雷达在理想环境下的点云质量。
为了使试验更贴近补盲激光雷达的实际应用场景,在暗室内设置不同距离和角度的漫反射板,模拟不同位置和方向的障碍物。漫反射板的反射率分别为10%、50%和90%,代表不同反射特性的物体。在模拟场景中,还添加了可模拟阳光和路灯的强光源,以测试激光雷达在不同光照环境下的点云质量,使试验结果更具实际参考价值。
3 试验方法与分析
3.1 测距精度试验
在不同距离下对激光雷达的测距精度进行测试,使用滑轨上的标定值得出真实距离,与激光雷达的测量值进行对比。当目标距离为5m时,进行100次测量,得到测距的RMSE为0.05m。当距离增加到15m时,RMSE增大到0.12m。在最大探测距离30m处,RMSE为0.2m。随着距离的增加,测距精度逐渐下降,这是由于激光在传播过程中的能量衰减和噪声干扰导致的。在实际应用中,这种测距精度的变化会影响自动驾驶系统对远距离目标的距离判断,需要在系统设计中予以考虑。
3.2 角度精度试验
角度精度试验步骤如下。
(1)将雷达固定在高精度转台上,竖直放置漫反射板于激光雷达一定水平距离处。
(2)旋转转台,使激光雷达视场中心与漫反射板中心重合,记录不少于100帧连续点云。水平旋转激光雷达,记录打在漫反射板左或右边缘位置的一个或一列点云由图3中“第2个/列点云”变为“第3个/列点云”。点云发生的变化如图4所示,其中灰色线条为软件中显示的坐标轴,可作为观察点云旋转量的参照物。转台转过的角度,即为该视场区域的水平角度分辨率。相同的,垂直旋转激光雷达,记录漫反射板上或下边缘位置的一个或一列点云变化转台转过的角度即为该视场区域垂直角度分辨率。
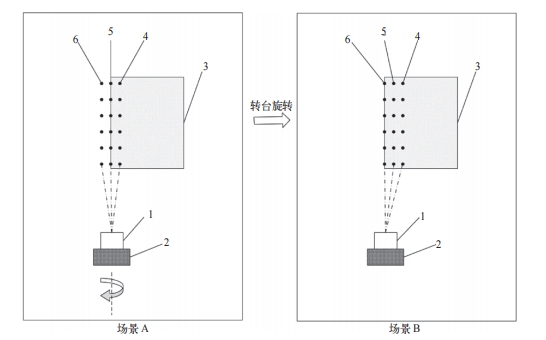
图3 角度精度试验方法示意
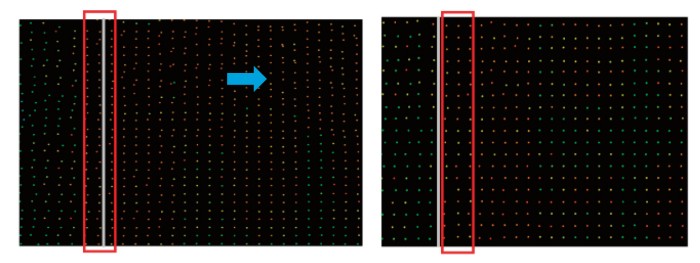
图4 实时采集的漫反射板点云变化
(3)重复步骤(2),测试其他视场区域的水平角度分辨率和垂直角度分辨率。
(4)统计每帧点云中测量目标的水平和垂直角均值,比对高精度转台的旋转值,计算标准差,以得出该视场区域的水平和垂直平均角度精度。
得到该雷达在视场区域中,水平角度偏差的标准差在0.05°~0.08°之间,在垂直方向上,角度偏差的标准差在0.06°~0.09°之间。
3.3 点云密度试验
在不同扫描区域和距离下以单位体积测量点云密度。在距离激光雷达5m的区域内,单位体积(1m³)内的点云密度为537个点。当距离增加到15m时,点云密度下降到249个点/m³。在30m处,点云密度仅为88个点/m³。随着距离的增加,点云密度显著降低,这会影响对远距离目标物体的细节描述能力。在扫描复杂场景时,不同区域的点云密度也存在差异,例如在目标物体的边缘和角落处,点云密度相对较低,可能导致对物体形状的识别不准确。
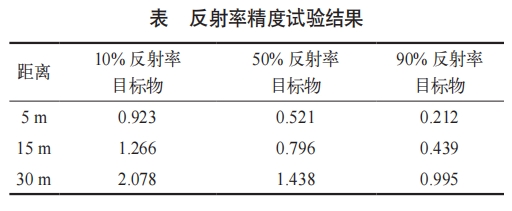
3.4 反射率精度试验
在不同距离下,放置符合朗博体特性的标值的不同反射率靶标,将激光雷达水平放置,直射靶标,记录不少于100帧连续点云。通过获取点云中靶标处反射率的值,计算标准差得出反射率精度。根据表中的试验结果可以看到,这些反射率值的标准差基本保持稳定,但在距离较远时,由于信号衰减等因素,反射率精度略有下降。
3.5 综合评估结果分析
根据层次分析法确定的权重,测距精度权重为0.4,角度精度权重为0.3,点云密度权重为0.2,反射率精度权重为0.1。结合各项指标的试验数据,计算补盲激光雷达点云质量的综合评估值。在理想的暗室环境下,综合评估值为0.85,表明点云质量较高。在引入干扰的模拟实际场景中,综合评估值下降到0.7,说明环境因素对补盲激光雷达点云质量有一定程度的影响。通过综合评估结果可以看出,该激光雷达在测距精度和角度精度方面表现较好,但在点云密度和抗噪声能力方面还有提升空间。
4 结语
本文通过对车载补盲激光雷达点云质量评估方法的研究,建立了一套包括评估指标选取、评估方法设计和数据处理与分析的评估体系,对某固态补盲激光雷达的点云质量进行了较为全面的评估。试验结果表明,该激光雷达在近距离具有较好的测距精度、角度分辨率和点云密度,反射率精度也基本满足要求。未来的研究可以进一步优化评估指标和权重确定方法,提高评估的准确性和可靠性。同时,随着激光雷达技术的不断发展,需要不断更新评估方法,以适应新的技术需求。
参考文献
[1] 皮青山.机载激光雷达测量系统及点云数据快速处理技术[D].青岛:山东科技大学,2011.DOI:CNKI:CDMD:2.1012.277206.
[2] 胡月,文清浩,刘娇杨.车载激光雷达角度精度和准度测量技术研究[J].时代汽车,2024(21).142-144.
[3] 王艺帆.自动驾驶汽车感知系统关键技术综述[J].汽车电器,2016(12):12-16.
[4] 靳克强,龚志辉,汤志强,等.机载激光雷达点云数据质量评价体系分析与探讨[J].测绘与空间地理信息,2012(4):4.
[5] 朱萱,韩鹏,吴子博,等.车载激光雷达参数问题研究进展[J].激光与红外,2024,54(9):1339-1345.
[6] FLOOD M, SEUBE N, WAGG D. Lidar point cloud quality control: Automating accuracy and precision testing[J]. Photogrammetric Engineering & Remote Sensing, 2024,90(2).69.
[7] 金振振,靳海亮,李志杰,等.机载LiDAR点云数据密度的影响因素研究[J].科技风,2019(12):1.
本文为“AI汽车制造业”首发,未经授权不得转载。版权所有,转载请联系小编授权(VOGEL100)。本文作者:尹兴科 朱陈伟 廖梓涵,单位:安徽江淮汽车集团股份有限公司 。责任编辑龚淑娟,责任校对何发。本文转载请注明来源:AI汽车制造业
AI汽车制造业
龚淑娟
李峥
热点文章
-

-

智能网联汽车轨迹优化方法研究综述
2026-07-07
-

看见·增程的“第二生长曲线”
2026-07-14
-

中国企业出海中的人才战略与文化融合
2026-07-07
-

面向ISO 34505的自动驾驶场景评价及测试优先级分析
2026-07-13
-

浅谈智能座舱与人机交互技术创新
2026-07-14
-

连接器如何破局?莫仕携“系统级决绝方案”迈入新阶段
2026-07-08
-
浅谈智能座舱与人机交互技术创新
在汽车电动化、智能化、网联化深度融合的产业趋势下,智能座舱已从配置竞争转向技术体系与落地能力的竞争。本文以零跑汽车为案例,从中央集成电子电气架构、高算力硬件、自研车机操作系统、多模态交互、舱驾融合以及车载大模型六大技术维度,对智能座舱与人机交互关键技术进行深入解析,并聚焦底层技术实现、工程化落地、量产应用效果与成本控制逻辑。研究表明,零跑汽车实现了高阶智能技术的大众化,为自主品牌提供了可复制的实践路径,验证了技术落地成效,并指明了未来优化方向。
作者:
-
看见·增程的“第二生长曲线”
-
面向ISO 34505的自动驾驶场景评价及测试优先级分析
-
国产化替代正当时:永铭车规级固液混合电容,为激光雷达发射端与算力核心提供高纹波耐受解决方案
-
智能网联汽车轨迹优化方法研究综述
-
AI《汽车制造业》增刊





评论
加载更多