伺服压力机自动化冲压线的应用及关键技术研究
伺服压力机自动化冲压线在产品质量提升、柔性生产和节能环保等方面具有无可替代的优势,具备十分广阔的应用前景。本文通过实例探讨了基于网野公司的伺服压力机及ABB机器人的冲压自动化生产线系统的构成,就设备选型、电气控制和自动化组线的关键技术进行了探讨与研究。
汽车车身钣金件冲压生产线是汽车生产过程中的重要设备,其生产质量和效率直接影响到汽车的质量和生产效率。随着中国汽车工业的不断发展,汽车车身钣金件的外观要求、结构设计复杂程度以及轻量化的要求驱使着汽车冲压生产线不断朝着高效率、高精度的方向发展;基于伺服压力机的冲压自动化生产线能够较好地满足上述要求,同时在质量、效率、噪声和节能等方面较传统的冲压生产线具有更明显的优势。
生产线构成
典型的冲压自动化生产线包括以下部分:压力机、机器人或机械臂、拆垛与上料机构、板料清洗及涂油设备、过渡皮带、对中系统、线尾出料系统、电控系统及安全防护装置。
图1为吉利某基地冲压自动化生产线的布置图。该生产线由网野伺服压力机及ABB机器人自动化系统组成,集成整线封闭防尘系统,生产节拍为8~11次/min(视生产的零件而定)。
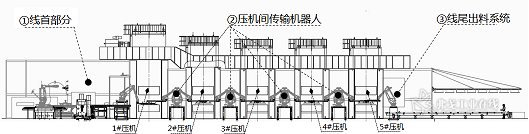
图1 冲压自动化布置
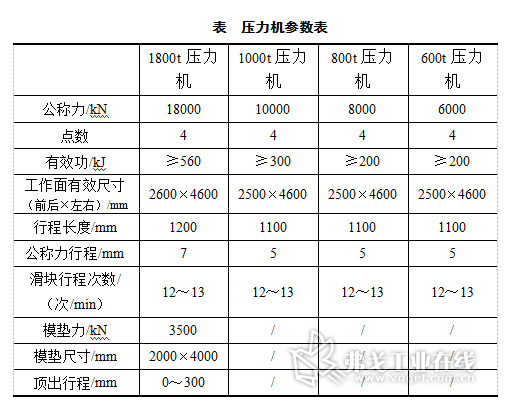
该生产线配置了5序机械连杆伺服压力机(1800t、1000t、800t、800t和600t)。首台压机最大滑块行程为1200mm,配备网野公司开发的数控液压垫,其余压机行程为1100mm,所有压机配置双工作台,左右开出,台面有效尺寸为4600mm×2600mm或4600mm×2500mm。压力机主要工艺参数如表所示。
自动化系统由线首部分、压机间传输机器人和线尾出料系统组成。线首部分由2台ABB RB6660六轴机器人、2台拆垛小车及附属的磁力分张装置、上料皮带机、SMT的清洗机及涂油机(各一台)、过渡皮带机和视觉对中系统等设备组成,可实现单/双片板料的拆垛、清洗、涂油、对中和上料等动作。压机间传输系统由4台ABB RB7600FX七轴机器人组成,每个机器人配备ABB专有的GONGDOLA(刚朵拉)碳纤维主杆,实现5台压机间的板件传输。线尾出料系统由1台ABB RB6660、出料皮带机和板料检测台构成。RB6660采用了ABB专有的CF BOOM碳纤维主臂和GONGDOLA碳纤维主杆。
关键技术探究
1.伺服压力机
(1)伺服驱动
AMINO机械连杆伺服压力机由2台(或4台)FANUC交流伺服电动机减速后同步驱动相应涡轮,通过重载丝杠螺旋副驱动上滑块运动,并经肘杆机构增力后驱动下滑块运动,实现将电动机旋转运动转变为滑块的上下运动;滑块运动过程中各点位置由位移传感器检测,可实现闭环控制。其传动方案如图2所示。
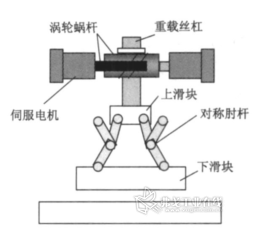
图2 网野压机传动示意图
该结构具有以下特点:模块化设计,可通过并联2个伺服电动机及相应的螺旋副组成的模块可实现更高吨位,公称力可达50000kN;肘杆机构可有效提高增力比,有效降低了单位吨位的电动机功率,比较经济;良好的急回特性,可降低伺服电动机加(减)速要求;肘杆对称布置,有利于平衡载荷,提高了设备抗偏载性能;上滑块行程远大于下滑块行程,因此,大行程压力机的生产效率较低,实际使用中最大生产节拍为11~12次/min。网野压机结构如图3所示。
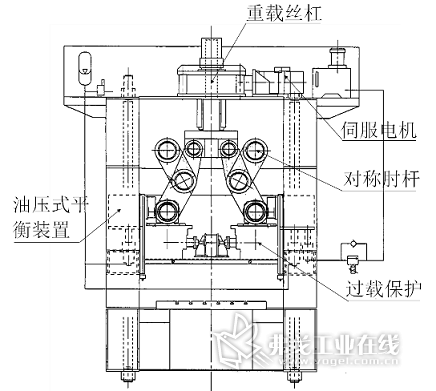
图3 网野压机结构图
(2)伺服成形技术
压机基于FANUC的CNC数字化控制技术,可在触摸屏上实现滑块位置、速度和压力的设定、显示和编辑,可对成形曲线任意编程以满足对原材料进行冲裁、拉深和拆弯;并可通过手轮进行微调(送进精度可达0.01mm,滑块可反向运动),实现试模功能。
通过键盘可设定5个滑块位置点的速度(10%~100%任意设定),用来仿真曲柄、连杆压力机的滑块运动曲线(见图4),从而实现加压前减速、成形时缓速甚至保压等功能,该特性十分适合高强度钢板、铝板等材料的加工。
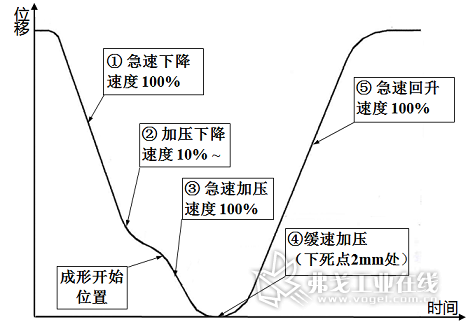
图4 压机滑块运动曲线
(3)数控液压垫
数控液压垫与传统的气垫相比,工作时压边力变化稳定,拉延时可任意控制压边力及行程,从而确保了工作的拉深质量,减少了板料与模具的冲击,提高了设备及模具的使用寿命。
1800t压机配置数控液压拉伸垫,最大模垫力为3500kN,具备预加速功能,可实现:压力缸的动作和升起缸的动作和速度可编程控制;设定拉伸垫回程缓冲区开始点;对四角压边力分别进行控制(每个点模垫力相差在20%以内);在拉深过程中对压边力公称值和实际值进行实时监控(设定值与实际值相差超过20%,压机将急停保护,液压垫停止运动,不卸压)。
(4)节能降噪
通过在压力机滑块下降/上升减速时伺服电动机变为发电机,电力回馈至电网的方式,可将整线综合能耗降低20%~30%。
因为压力机的工作曲线可任意编程,通过合理设置加工段的滑块/模垫曲线,可最大可能地降低上模与零件冲击,减少振动,实际运行时噪声值较机械压机降低了15~20dB。
2.自动化系统
(1)直线七轴
通过在传统的6轴机器人上附加一个可伺服控制的外部轴,使工件沿着线性路径快速传送,其复合运动不仅显著提高了零件传输速度,消除了零件旋转时产生的振动,同时降低了机器人及其端拾器对于模具净空间的需求。相同的条件下,采用直线七轴技术,可将整线的生产节拍提升1~2件/min。
直线七轴集成压缩空气管路及标准化快速夹紧装置,为实现端拾器的自动更换(ATC)功能提供了可能。直线七轴FCB如图5所示。
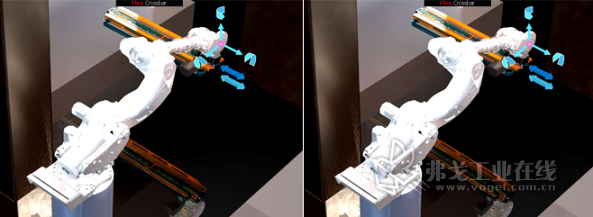
图5 直线七轴FCB
(2)视觉对中系统
传统的重力对中和机械对中均为接触式,钢板在重力下滑动或气缸拍打对中时,表面可能产生瑕疵;而且由于其结构限制,不能满足复杂轮廓的异形料的对中与双片料同时对中的需要。
视觉定位系统基于视觉识别技术,通过工业以太网与自动化系统PLC通信,当零件传送到设定位置后,PLC向视觉系统发送触发拍照信号;视觉系统拍照并进行图像处理,完成零件位置(横坐标、纵坐标和偏转角度)计算,并反馈至机器人,机器人根据传输来的位置偏移量信息,调整姿态抓取零件,放置到指定位置。
双件生产时,其识别过程与单件类似,通过一次拍照视觉对中系统即可分析出两片板料的位置信息;机器人根据位置信息,在抓取一片板料后,通过调整端拾器的位置,再次抓起另一片板料,将两片板料同时放入首台压机中,整个过程所需时间少于500ms。
(3)碳纤维主臂与碳纤维主杆
ABB独有的碳纤维主臂CF BOOM及端拾器的碳纤维主杆GONGDOLA(刚朵拉),在提高端拾器刚度的同时也降低了端拾器的自重。六轴机器人和七轴机器人端拾器分别如图6和图7所示。
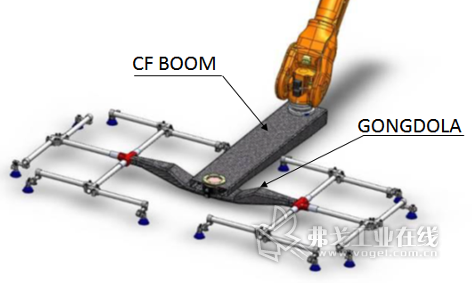
图6 六轴机器人端拾器

图7 七轴机器人端拾器
在压机滑块行程一定的条件下,采用GONGDOLA的端拾器降低了机器人取件时对于模具开口净空间的要求,避免了机器人进入模具区域取件时进行姿势调整,效率更高;该特性同样适用于压机滑块行程较小而拉延深度较大的模具(模具开口不足)的情况。图8所示的端拾器总体厚度为200mm(包括端拾器快换接头),GONDOLA在外形上可与工件实现叠加,实际厚度仅有130mm,远小于采用铝合金主杆的端拾器厚度(250~350mm)。

图8 GONDOLA与侧围外板叠加区域
(4)ATC
整线集成ATC更换功能,机器人根据设定的生产配方自动选择端拾器,无需人工干预。
端拾器采用左右分体结构,通过专用的装卸模块与GONDOLA配合,装卸模块上加工出真空发生器的进/出气口、定位孔,并与GONDOLA一侧的接头对应,操作者只需将端拾器的左右分体分别插入GONDOLA两侧接口内锁紧即可;切换时,机器人与端拾器通过快换装置的公/母接口联接(见图9c),锁紧/松开端拾器由快换装置中内置的气动锁紧机构完成。
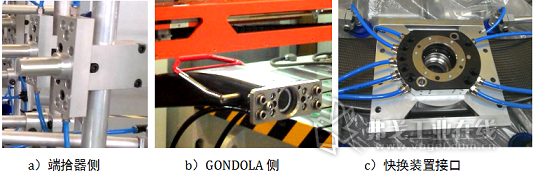
图9 自动化端拾器专用接口
拆垛与上料机器人各配置3套通用端拾器,涵盖各种尺寸的板料;更换时,机器人将旧的端拾器放置至端拾器支架的预定位置后,调整运动轨迹,拾取新的端拾器。
压机间及线尾机器人均配置端拾器更换小车,可同时存放2套端拾器(已更换与待更换的端拾器)。端拾器切换时,整线封闭上的安全门开启,气缸驱动小车进入冲压线内一定距离,便于机器人装卸。
为了确保更换过程中的安全可靠,端拾器存放架及更换小车均安装端拾器在位检测开关,信号接入自动化系统;同时,安全门、机器人和端拾器更换小车均已被自动化系统监控并安全互锁。线首端拾器支架和端拾器更换小车分别如图10和图11所示。
整个更换过程可控制在4min以内,且不影响压力机的自动换模。
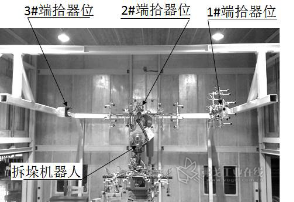
图10 线首端拾器支架

图11 端拾器更换小车
3.整线集成
(1)控制系统
压机控制系统基于FANUC最新一代的Power Motion i-MODEL A高速工业机械用CNC,采用FSSB现场通信协议,CNC与伺服驱动器间采用光纤连接,最多可同时控制10台伺服电动机及32个伺服轴;集成的FANUC I/O Link i可串行连接PLC与I/O单元,其各通道的IO/DO点数为2048点/2048点,完全满足压力机的控制需要;支持Profibus-DP/Profinet、CC-Link等现场总线以及Ethernet/IP工业以太网,可实现与计算机/机器人数据交换,预留整线自动化组线接口。FANUC CNC控制系统网络如图12所示。
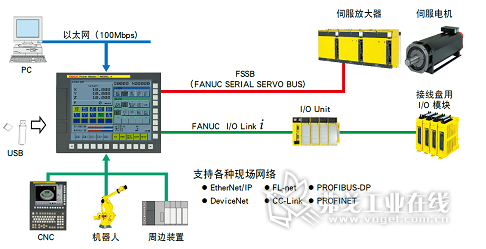
图12 FANUC CNC控制系统网络
通过人机界面触摸操作,可实现压力机的加压速度、模高模垫等参数设定,并可实时显示滑块、模垫和吨位等信息,集成故障快速诊断系统,故障点及内容可从界面快速读出。
自动化系统采用西门子的S7-319F-2DP安全型PLC,集成ABB冲压控制及安全软件,基于分散控制,采用设备层和控制层两级控制模式。设备层采用Profibus总线通信,包括控制台及机器人控制单元、各检测单元(接近开关、光电开关等)和执行单元(电动机、电磁阀等)通过Profibus现场总线直接与PLC通信;管理控制层采用工业以太通信,各控制PLC间及PLC与上位机的通信采用工业以太网方式。主控制台及机器人控制单元的人机界面配置相应的触摸屏;主控制台的人机界面可完全覆盖整线的参数配置,机器人控制单元的人机界面集成ABB开发的StampWare软件,具备机器人示教功能。自动化系统控制图如图13所示。
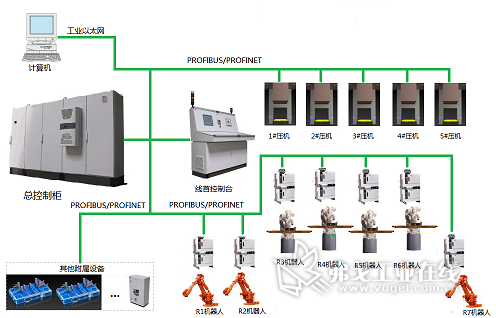
图13 自动化系统控制图
(2)自动化通信
Profibus是世界工业自动化等领域中应用最成功的现场总线之一,能够很好地实现各自动化设备之间的信息交换。冲压自动化生产线中采用西门子PLC并基于Profibus总线的应用案例非常普遍,但基于Profibus总线的FANUC数控系统与西门子PLC的冲压自动化生产线的应用十分少见。
前文中已提到压机采用的Power Motion i-MODEL A控制系统支持Profibus-DP通信,通过配置不同的Profibus-DP模块可分别实现主/从控制,对应的软件及设置也有所不同。网野压机采用的Profibus从模块如图14所示。
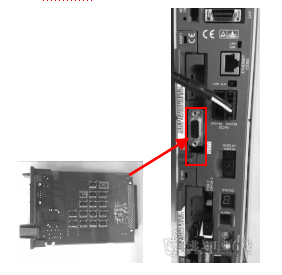
图14 网野压机采用的Profibus从模块
比较而言,FANUC的CNC作为从站时,组态比较便捷。从站配置信息(站号、输入/输出数据区)可在压机侧的CNC上设定完成;在自动化一侧的西门子PLC完成导入FANUC的GSD文件,并设定从站号、输入/输出的地址偏移和信号定义。通过西门子的专用硬件组态程序,设置集成DP口的CPU主站,生成Profibus主站系统总线,找到从站设备并定义好其DP地址,组态完成。
需要注意的是,由于西门子与FANUC对于“字,双字”的数据高低位定义是存在差异的,因此需要颠倒西门子PLC的高低字节顺序,才能正确完成数据的读取与写入。
结语
伺服压力机及其自动化生产线由于其优异的加工性能、良好的工作环境、节能环保和故障率低等特性,正日益成为主流汽车厂的优先选项。网野公司生产的大型伺服压力机在生产效率上虽较舒勒、小松的同类产品存在一定差距,但其具有相对低廉的价格和毫不逊色的工艺性能;直线七轴机器人作为ABB主流的机器人产品,其效率与柔性较其竞争者的同类产品也有十分明显的优势。因而对两者的集成与整合,不失为一种创新与高性价比的选择,对汽车制造业有一定的借鉴意义。
AI《汽车制造业》
龚淑娟
李峥
热点文章
-

智能汽车场景化开发:系统融合与 用户体验的协同研究
2026-07-20
-

“泰钽”来了!开启智能越野3.0时代
2026-07-22
-

基于传动效率的多模复合功率分流混合动力系统模式控制研究
2026-07-21
-

乘用车混合动力总成系统设计和性能仿真研究
2026-07-22
-

动力系统主导车市质变,增程器迈入系统竞争
2026-07-23
-

基于深度学习的电驱实验系统设计
2026-07-24
-

-
基于深度学习的电驱实验系统设计
针对传统永磁同步电机建模方法难以兼顾精度与实时性的问题,本文基于深度学习技术提出一种融合物理约束的永磁同步电机降阶模型,通过深度神经网络实现对电机非线性电磁特性的精细化建模。围绕所提降阶模型,搭建了电驱实验系统,并将该模型集成至电驱系统中,实现了实时硬件在环验证。在不同工况下对降阶模型和传统dq轴解析模型开展实验分析,结果表明,所提出的基于深度学习的永磁同步电机降阶模型在保证高精度建模的同时,实现了更好的动态性能。该模型支撑的实验系统可用于电驱系统的快速仿真与控制算法研究,具有良好的工程应用前景。
作者:
-
动力系统主导车市质变,增程器迈入系统竞争
-
“泰钽”来了!开启智能越野3.0时代
-
乘用车混合动力总成系统设计和性能仿真研究
-
基于传动效率的多模复合功率分流混合动力系统模式控制研究
-
智能汽车场景化开发:系统融合与 用户体验的协同研究





评论
加载更多