自动驾驶系统之多传感器信息融合篇
多传感器信息融合系统功能和结构模型
信息融合模型可以用功能、结构和数学模型等几方面来研究和表示。功能模型从融合过程出发,描述信息融合包括哪些主要功能、数据库,以及进行信息融合时系统各组成部分之间的相互作用过程;结构模型从信息融合的组成出发,说明信息融合系统的软、硬件组成,相关数据流、系统与外部环境的人机界面;数学模型则是信息融合算法和综合逻辑。为了更有针对性地研究信息融合算法,本次讨论信息融合系统的功能和结构模型。
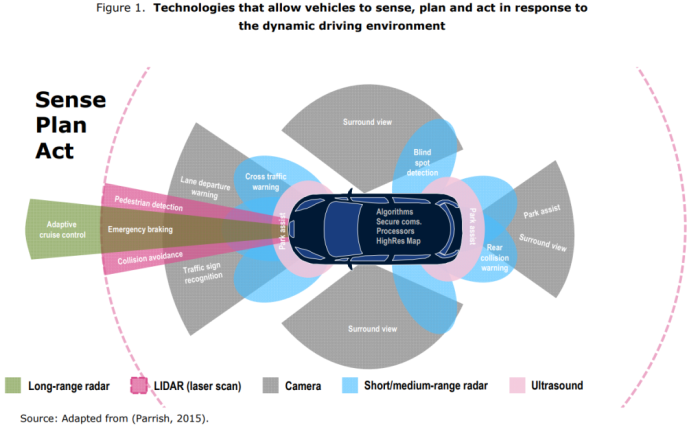
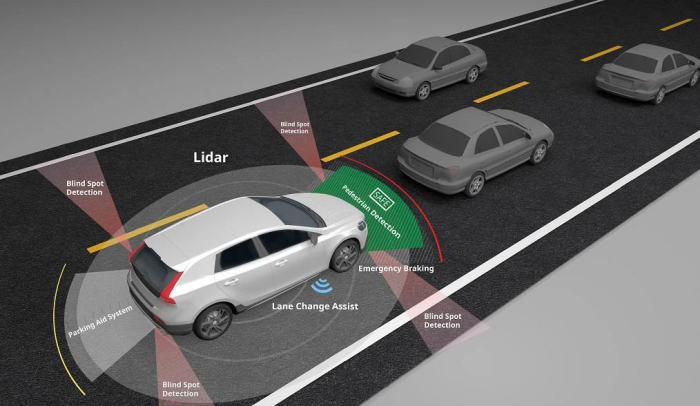
多传感器信息融合示意
根据融合的功能层次,把信息融合分为五级,即五个层次。在信息融合的五级模型中,第一个层次为检测判决融合;第二个层次为位置融合;第三个层次为目标识别(属性)信息融合;第四个层次为态势评估;第五个层次为威胁估计。在这种功能模型描述中,前三个层次的信息融合适合于任意的多传感器信息融合系统,而后两个层次主要适用于军事应用指挥控制通信计算机情报监视与侦察系统,CSR系统中的信息融合。这是一种广义的信息融合功能分级法,这种从信息融合功能的角度出发把它分为五个层次,更有利于信息融合技术的研究。下图给出了这种分级方法的功能框图,图中,左边是传感器的监视/跟踪环境及数据的采集源。辅助信息包括人工情报、检验信息和环境参数。融合功能主要包括第一级处理、预滤波、采集管理、第二级处理、第三 级处理、第四级处理、第五级处理、数据库管理、支持数据库、人机接口和性能评估。
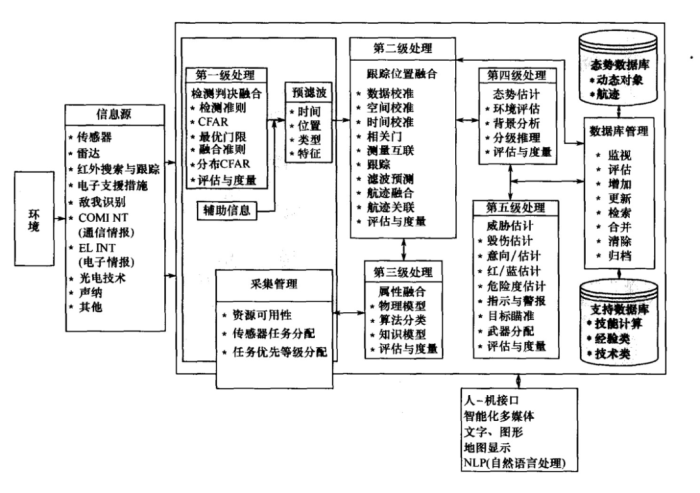
功能框图
检测级融合结构
从分布检测的角度看,检测级融合的结构模型主要有五种:即分散式结构、并行结构、串行结构、树状结构和带反馈并行结构。 分散式空间结构的分布检测系统如下图所示,这空间结构实际上是将并行结构中的融合节点S取消后得到的。每个局部决u(i=1,,N)又都是最终决策。在具体应用中可按照某种规则将这些分离的子系统联系来,看成一个大系统,并遵循大系统中的某种最优化准则来确定每个子系统的工作点。并行结构的分布检测系统如下图所示,N个局部节点S1,S2,…,S的传感器在收到未经处理原始数据Y1,Y2,…,Y之后,在局部节点分别作出局部检测判决,然后,它们 在检测中心通过融合得到全局决策uo。这种结在分布检测系统中的应用较为普遍。
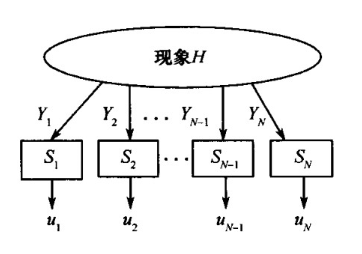
分散式结构
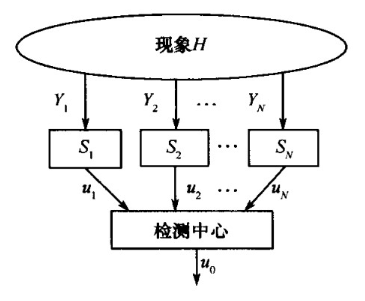
并行结构
位置融合结构
从多传感器系统的信息流通形式和综合处理层次上看,位置融合级系统结构模型主要有四种,即集中式,分布式,混合式和多级式。分别如下图所示:
集中式融合
分布式融合
混合式融合
多级式结构
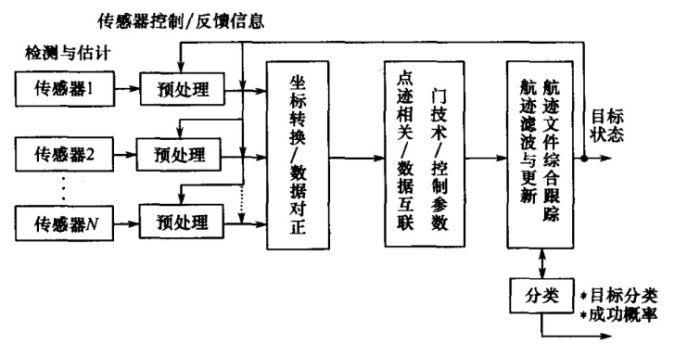
集中式结构将传感器录取的检测报告传递到融合中心,在那里进行数据对准、点迹相关、数据互联、航迹滤波、预测与综合跟踪。这种结构的最大优点是信息损失最小,但数据互联较困难,并且要求系统必须具备大容量的处理能力,计算负担重,系统的生存能力也相对较差。
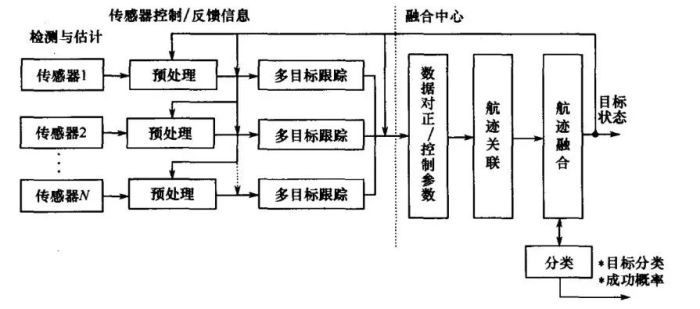
分布式结构的特点是:每个传感器的检测报告在进入融合以前,先由它自己的数据处理器产生局部多目标跟踪航迹,然后把处理过的信息送至融合中心,中心根据各节点的航迹数 据完成航迹关联和航迹融合,形成全局估计,这类系统应用很普遍。特别是在军事CISR系统中,它不仅具有局部独立跟踪能力,而且还有全局监视和评估特征的能力。系统的造价也可限制在一定的范围内,并且有较强的自下而上能力。这种结构还称作分级式3和自主式融合。在分布式结构中,各节点连接成类似于环形的结构,或许还有相互交叉的信息传输。
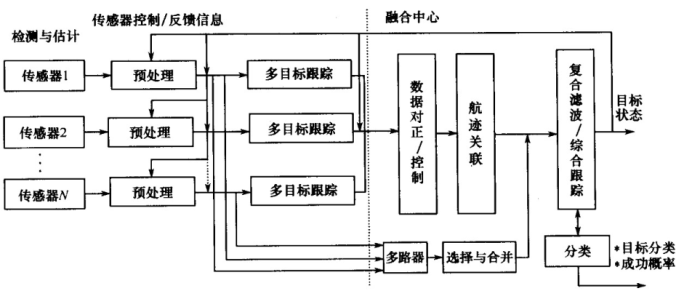
混合式同时传输探测报告和经过局部节点处理过的航迹信息,它保留了上述两类系统的优点,但在通信和计算上要付出昂贵的代价。对于安装在同一平台上的不同类型传感器,如雷达、敌我识别(IFF)、红外搜索与跟踪、电子支援措施(ESM)组成的传感器群也许用混合式结构更合适,例如机载多传感器数据融合系统。
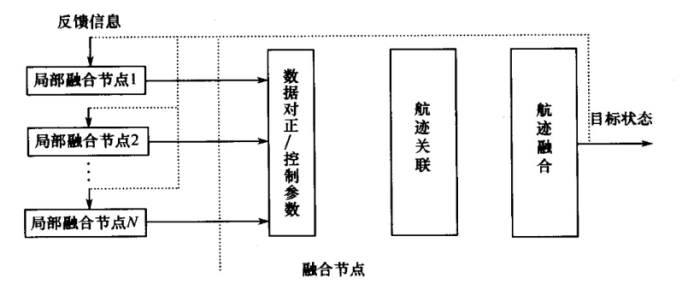
在多级式结构中,各局部节点可以同时或分别是集中式、分布式或混合式的融合中心,它们将接收和处理来自多个传感器的数据或来自多个跟踪器的航迹,而系统的融合节点要再次对各局部融合节点传送来的航迹数据进行关联和融合,也就是说目标的检测报告要经过两级以上的位置融合处理,因而把它称做多级式系统。典型的多级式系统如海军指挥控制中心、舰队指挥中心、海上多平台系统、岸基或陆基战役或战略CR系统等。为了提高局部节点的跟踪能力,对分布式、混合式和多级式系统,其局部节点也经常接收来自融合节点的反馈信息如果从数据融合系统的五个层次上看,任何一个军用多传感器系统都可以看成是多级式融合结构。
多传感器信息融合示意
目标识别融合结构
如之前所述,目标识别(属性)数据融合结构主要有三类:决策层属性融合、特征层属性融合和数据层属性融合。下图给出了决策层属性融合结构。在这种方法中,每个传感器为了获得一个独立的 属性判决要完成一个变换,然后顺序融合来自每个传感器的属性判决。其中I/D是来自第i个传感器的属性判决结果。示意图如下:
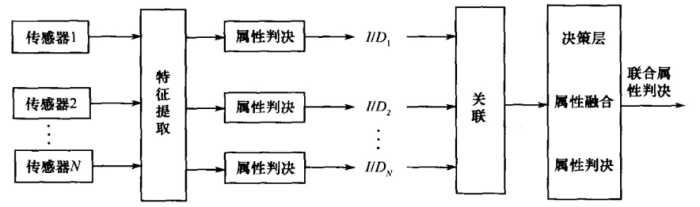
决策层属性融合结构
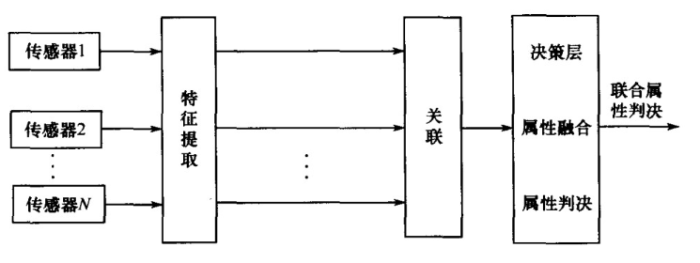
特征层属性融合的结构
在这种方法中,每个传感器观测一个目标,并且为了产生来自每个传感器的特征向量要完成特征提取,然后融合这些特征向量,并基于联合特征向量作出属性判决。另外,为了把特征向量划分成有意义的群组必须运用关联过程对此,位置信息是有用的。数据层属性融合结构表示在下图中。在这种数据层融合方法中,直接融合来自同类传感器的数据,然后是特征提取和来自融合数据的属性判决。为了完成这种数据层融合,传感器必须是相同的(如几个红外(IR)传感器)或者是同类的(例如一个红外传感器和一个视觉图像传感器)。为了保证被融合的数据对应于相同的目标或客体,关联要基于原始数据完成。与位置融合结构类似,通过融合靠近信源的信息可获得高的精度,即数据层融合可能。
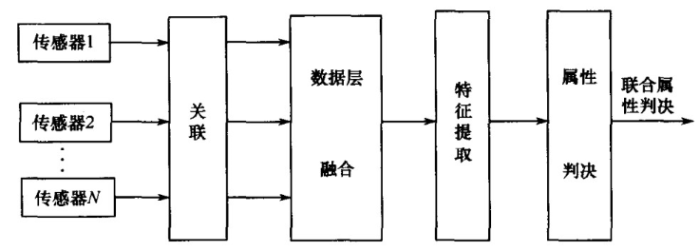
数据层属性融合的结构
比特征层精度高,而决策层融合可能最差,但数据层融合仅对产生同类观测的传感器是适用的。当然通过这三种方法也可以组成其他混合结构。另外,就融合的结构而论,位置与属性融合是紧密相关的,并且常常是并行同步处理的,这就是有人把它们看成一级融合的原因。Dasarathy将传统的数据层、特征层和决策层融合进一步细分为“数据入数据出(DAI DAO)”、“数据入特征出(DAI-FEO)”、“特征特征出(FEI-FEO)”、“特征入决策出 (FEI-DEO)”和“决策入决策出(DEI-DEO)”五级该方法可用于构建灵活的信息融合系统结构,对实际的应用研究有指导意义。
多传感器信息融合的优势在于,能够综合利用多种信息源的不同特点,多方位获得相关信息,从而提高整个系统的可靠性和精准度。未来传感器融合技术将显得更加重要,并且会成为一种趋势。
热点文章
-

智能汽车场景化开发:系统融合与 用户体验的协同研究
2026-07-20
-

“泰钽”来了!开启智能越野3.0时代
2026-07-22
-

基于传动效率的多模复合功率分流混合动力系统模式控制研究
2026-07-21
-

乘用车混合动力总成系统设计和性能仿真研究
2026-07-22
-

动力系统主导车市质变,增程器迈入系统竞争
2026-07-23
-

基于深度学习的电驱实验系统设计
2026-07-24
-

-
基于深度学习的电驱实验系统设计
针对传统永磁同步电机建模方法难以兼顾精度与实时性的问题,本文基于深度学习技术提出一种融合物理约束的永磁同步电机降阶模型,通过深度神经网络实现对电机非线性电磁特性的精细化建模。围绕所提降阶模型,搭建了电驱实验系统,并将该模型集成至电驱系统中,实现了实时硬件在环验证。在不同工况下对降阶模型和传统dq轴解析模型开展实验分析,结果表明,所提出的基于深度学习的永磁同步电机降阶模型在保证高精度建模的同时,实现了更好的动态性能。该模型支撑的实验系统可用于电驱系统的快速仿真与控制算法研究,具有良好的工程应用前景。
作者:
-
动力系统主导车市质变,增程器迈入系统竞争
-
“泰钽”来了!开启智能越野3.0时代
-
乘用车混合动力总成系统设计和性能仿真研究
-
基于传动效率的多模复合功率分流混合动力系统模式控制研究
-
智能汽车场景化开发:系统融合与 用户体验的协同研究





评论
加载更多