汽车是如何感知环境的
过去上百年的时间里,使用双手更好的去驾驶汽车,是汽车产品发展的方向,也是汽车技术提升的方向。但当辅助驾驶功能全面进入到了汽车内以后,一台车“看”的能力,开始变得要比“开”更加关键。从我们熟知的倒车雷达,到现在的激光雷达,汽车在“看”这件事上,你知道究竟发生了哪些故事么?
汽车的“视力”是如何进化的
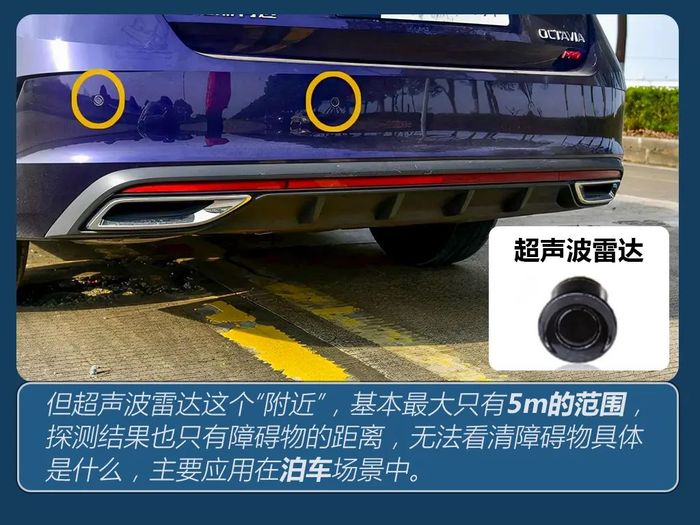
虽然现在的汽车配备有内外后视镜,来帮助驾驶者扩大视野范围,但仍旧无法消灭周围存在的盲区,尤其是常见的倒车场景中,很难直接观察到车尾到障碍物的距离。这时如果汽车这个“铁疙瘩”能帮我们来“看一眼”该有多好,于是倒车雷达(超声波雷达)逐渐在汽车上实现了普及,让汽车拥有了对附近障碍物的“观察能力”。
这时的汽车在“看”东西时,仍旧处于一种“似是而非”的状态,甚至能把墙上画的人当成真实存在的人,对静止障碍物的识别也不太靠谱。实现自适应巡航、自动泊车基本已经达到了汽车“视力”的“天花板”,甚至还出现过撞上静止车辆、追尾前方白色货车等重大事故。对于想要追求更高级辅助驾驶功能的我们,汽车的“视力”还需要变得更强一些。

显然创造一个媲美人类大脑视觉功能的电脑,不是一件简单的事情,需要进行大量的训练,来教会机器人怎么从二维世界里挖掘到足够多还足够准确的信息。所以更多的车企选择了提升传感器硬件能力的路线,用一种更粗暴的方式解决“视力”问题。像小鹏、蔚来、理想等车企以及华为,纷纷将激光雷达这种更高级的传感器安装到了汽车上。

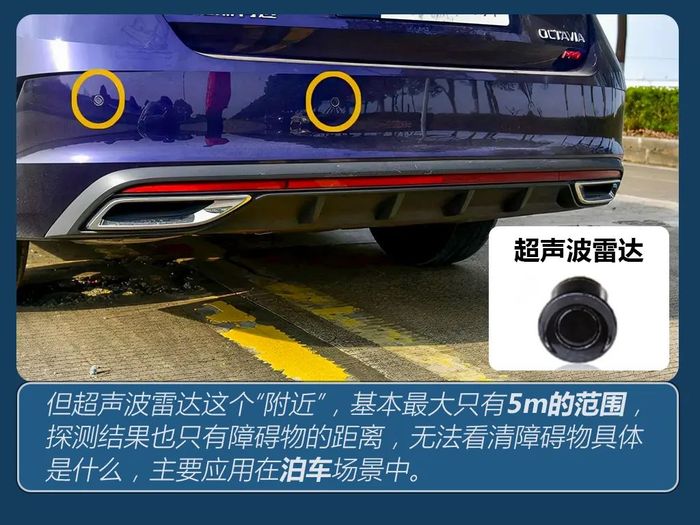
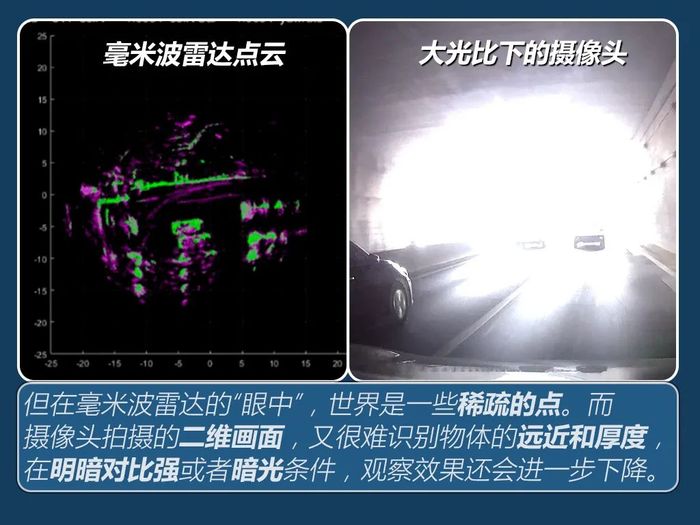
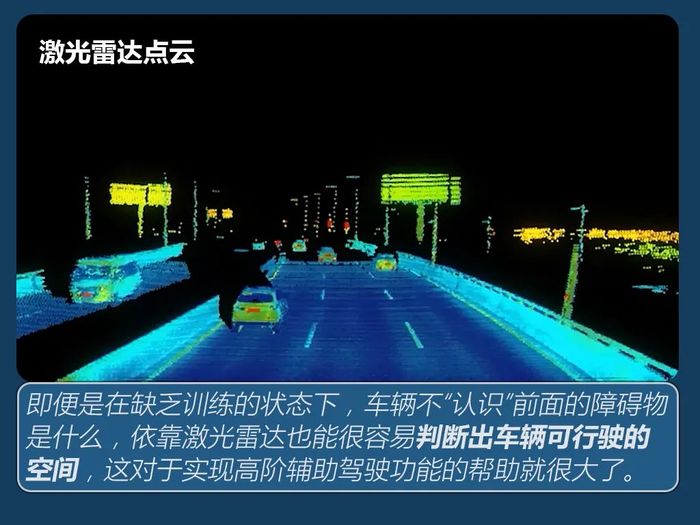
激光雷达的工作原理类似于打手电筒走夜路,先发射光束照亮我们面前的区域,被照射到的障碍物再将光束反射回来,由激光雷达里的接收单元接收,最后处理三维的空间信息。相比只会拍摄二维画面的摄像头,维度上的碾压能让车辆的感知能力发生质的飞跃,甚至能分辨出近处飞来的物体只是一个薄薄的塑料袋,还几乎不受光线条件的影响。
激光雷达的核心参数
作为车辆看世界的“眼睛”,看得清、看得全、看得远是激光雷达最重要的指标。想要看得清,被测量物体上就要有足够多的激光点,形成足够密集的点云,这一原理与屏幕的分辨率大小与清晰度的关系非常类似。而如果点云过疏,物体外形就会变形到无法辨别,甚至探测不到障碍物的存在。在这方面,最直观的指标就是角分辨率,它以角度为作为单位,数字越小代表的分辨率越高。
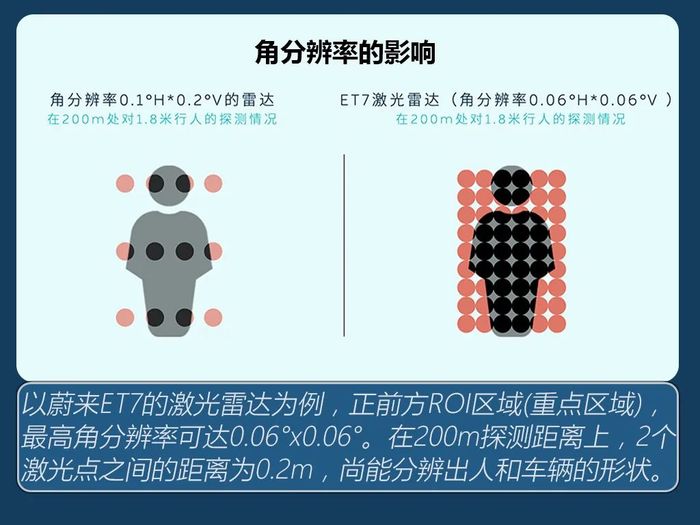
而如果角分辨率增大到0.2°,在200m距离上2个激光光束之间的距离就扩大到了200m*tan0.2°≈0.7m,这时行人、自行车、摩托车在点云里基本就是只剩一个点了,在这种情况下,真是人畜不分了。
看得全这个要点,主要是靠激光雷达的水平垂直视场角这个参数来进行评估,体现了激光雷达的可视范围有多大。根据目前披露的信息,理想L9使用的激光雷达视场角是120°(横向)×25.4°(纵向),蔚来ET7、小鹏G9和华为激光雷达都是120°(横向)×25°(纵向),大家的差距不大。

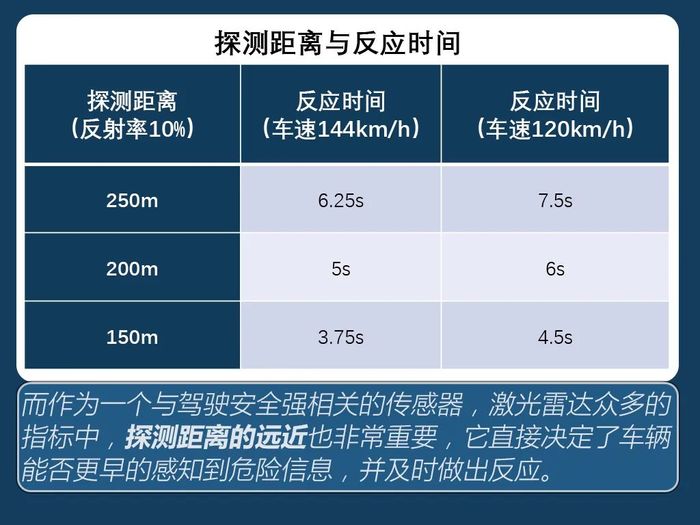
但车企在宣传激光雷达的探测距离时,经常会有两个成绩。比如蔚来ET7使用的激光雷达,就有500m和250m两个数值。而这两个相差一倍的数字,并不是存在什么“猫腻”,而主要跟反射率条件相关,它就像在聊电动车续航时,我们需要先明确NEDC/CLTC/等速这些工况作为前提。
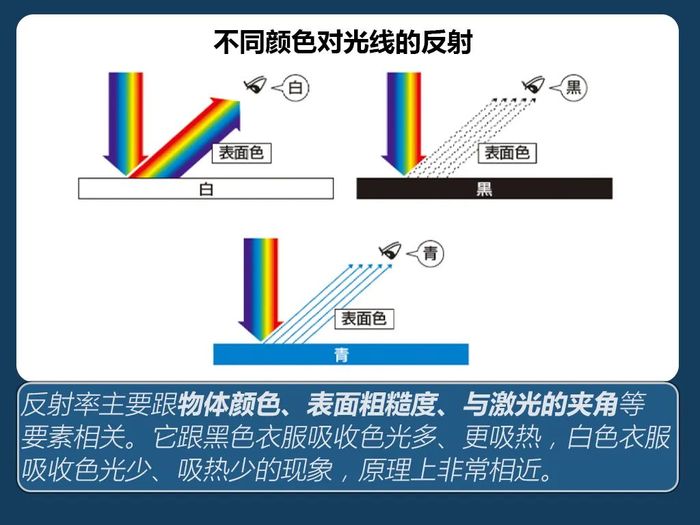
反射率就是那个“猫腻”
反射率可以简单理解为照向障碍物的光线有多少能被反射回来,是被探测物体反射的激光能量占总发射能量的百分比。像用手电筒看路的过程一样,如果手电筒的光大都被前面的物体吸收了,反射回来的光线就不够让人看清前面有什么,反射率低的物体也容易“消失”在激光雷达的视野里。

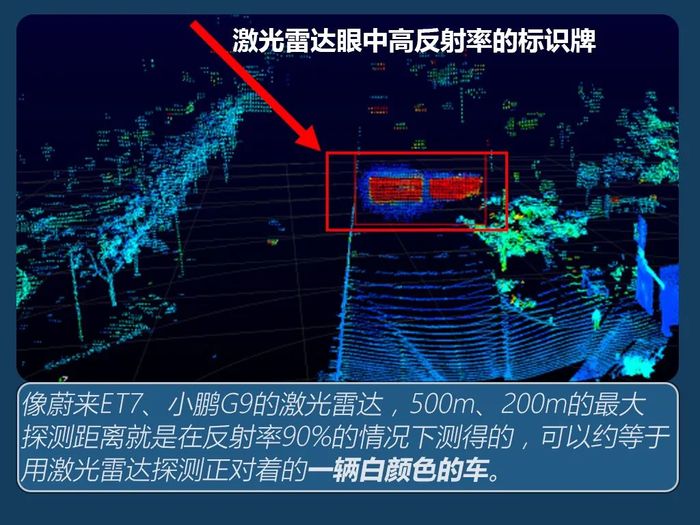
业内目前常用的探测距离标准,都是在物体反射率10%这一比较严苛的情况下测得的,在这一标准下,蔚来ET7、理想L9、小鹏G9、华为激光雷达,探测距离分别为250m、200m、150m和150m。它大概类似于探测一辆全黑车漆、又把车牌和车灯用黑布盖住的车辆时,能够探测的最大距离,这已经属于比较极限、且很难在生活中出现的情况了。
所以在看激光雷达的探测距离时,你需要像确定续航/油耗成绩的工况一样,先瞅一眼这个成绩对应的反射率究竟是多少。而同在10%这个比较极限的状态下,激光雷达的探测距离也基本代表了它探测能力的下限,对于比较、判断激光雷达的好坏是一个很客观、有效的指标。
如何让激光雷达看得更远
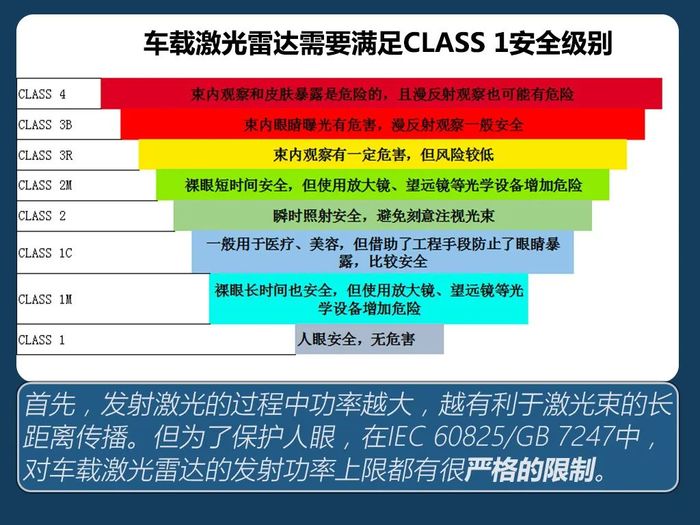
由于物体的反射率条件总是各不相同,想要让激光雷达看得更远,就需要从它发射、传播、反射、接收这一工作流程中另外三个方面下手,类似于手电筒照路过程中换个更厉害的手电筒、再给人眼配上合适的眼镜,主要对应着发射功率、散射系数、接收器灵敏度等指标。而目前常见的905nm、1550nm激光,在这些环节上有着各自的优劣势。
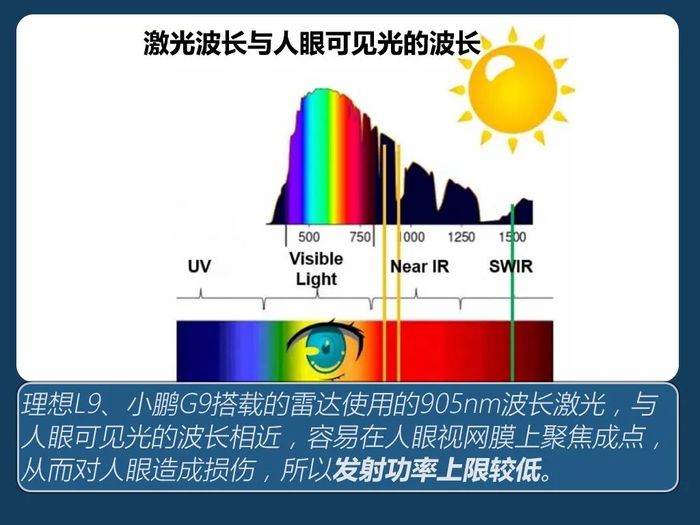
而1550nm激光,因为能被人眼的晶状体和角膜吸收、无法在人眼视网膜上聚焦成点、对视网膜伤害更小,能使用的最大输出功率上限要比905nm激光要大很多。实际应用中蔚来ET7使用的1550nm激光雷达27W的额定功率要比理想L9、小鹏G9 905nm的激光雷达高出近1倍,这对提升激光雷达的探测距离很有帮助。

但就像不同轮胎适应不同路况一样,不同波长的激光雷达,也有自己更适应的环境。比如,1550nm激光更擅长在空气、粉尘中传播,但却对水比较“过敏”,在雨雪天气里不如905nm激光更“坚挺”,探测距离也会受到一定的影响。
最后,物体反射回来的激光,还需要被光电探测器转化成电信号,再由信号处理模块进行识别和处理。光电探测器的灵敏度高低,也是激光雷达“眼神”好不好的重要指标。由于不同类型的半导体材料,对不同波长的激光灵敏度不同,905nm激光通常使用硅基光电探测器,1550nm激光则需要搭配价格更贵的铟镓砷光电探测器。
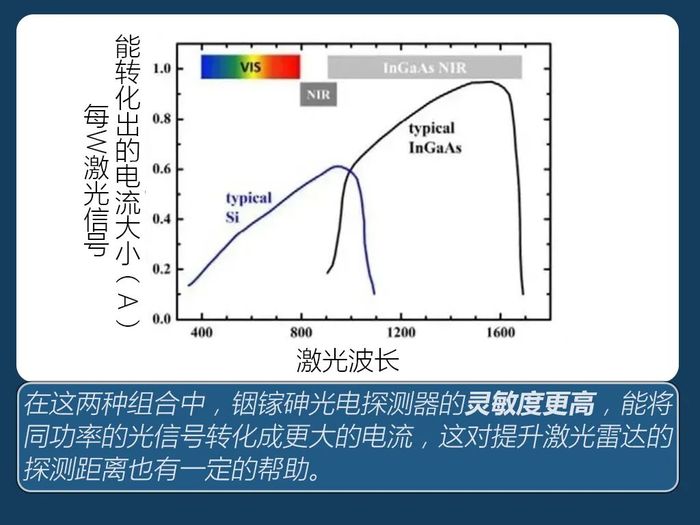
总的来说,1550nm激光在探测距离上拥有一定的优势。但需要说明的是,它需要使用光纤激光器来产生激光,再用铟镓砷光电探测器进行接收,这两种器件的价格目前要比905nm激光常用的半导体激光器和硅基光电探测器贵很多。想看得远,现在也要付出不低的成本作为代价,不过好在它们的价格在近几年也出现了跳水,也许不久之后就能降价到一个消费者都能接受的程度。
如何让汽车看得再远一些
而如果,我还想让汽车看得再远一些,有办法么?有!那就是给车辆和道路装上车联网的“超级赛亚人形态”——V2X技术。有了它,汽车的“视野”范围将进一步从车辆周边的区域拓展至网上的每个节点,不仅在自动驾驶时更安全,还可以做到告别堵车、一路绿灯。



以目前的技术水平,V2X已经可以实现“透视”被遮挡的行人让车辆提前减速、从辅路依次汇入主干道、交通灯信号等交通标志信息的预报、根据红绿灯信号计算出全程绿灯畅行的理想速度等功能,是对车载传感器感知能力的有效补充。而智慧道路、智慧城市的基础设施建设也在北京、上海、无锡等地进行建设,这样一种“神奇”的功能也离我们并不遥远。
热点文章
-

智能汽车场景化开发:系统融合与 用户体验的协同研究
2026-07-20
-

“泰钽”来了!开启智能越野3.0时代
2026-07-22
-

基于传动效率的多模复合功率分流混合动力系统模式控制研究
2026-07-21
-

乘用车混合动力总成系统设计和性能仿真研究
2026-07-22
-

动力系统主导车市质变,增程器迈入系统竞争
2026-07-23
-

基于深度学习的电驱实验系统设计
2026-07-24
-

-
基于深度学习的电驱实验系统设计
针对传统永磁同步电机建模方法难以兼顾精度与实时性的问题,本文基于深度学习技术提出一种融合物理约束的永磁同步电机降阶模型,通过深度神经网络实现对电机非线性电磁特性的精细化建模。围绕所提降阶模型,搭建了电驱实验系统,并将该模型集成至电驱系统中,实现了实时硬件在环验证。在不同工况下对降阶模型和传统dq轴解析模型开展实验分析,结果表明,所提出的基于深度学习的永磁同步电机降阶模型在保证高精度建模的同时,实现了更好的动态性能。该模型支撑的实验系统可用于电驱系统的快速仿真与控制算法研究,具有良好的工程应用前景。
作者:
-
动力系统主导车市质变,增程器迈入系统竞争
-
“泰钽”来了!开启智能越野3.0时代
-
乘用车混合动力总成系统设计和性能仿真研究
-
基于传动效率的多模复合功率分流混合动力系统模式控制研究
-
智能汽车场景化开发:系统融合与 用户体验的协同研究





评论
加载更多