一文解析自动驾驶系统中的不确定性感知场景
ADS主要是由高速场景向城市道路场景演进来落地领航辅助NOA功能。随着车辆传感器等高性能硬件配置增加、大算力平台的构建、以及AI算法的泛化能力提升,NOA全场景的落地节奏在明显加快。AI与场景的深度融合,推动ADS逐步实现从低速到高速,从载物到载人,从商用到民用,从阶段一提供L2高级辅助驾驶和L3拥堵高速公路副驾驶,发展到阶段二可以提供L3拥堵公路自动驾驶和L4高速公路自动驾驶,最终实现阶段三的L4城郊与市区自动驾驶和L5商用无人驾驶。然而大量的分析表明,目前在很大的程度上自动驾驶车或者无人驾驶AVs的安全性能估计比人类驾驶明显要差一个数量级,虽然可以适应仿真和简单低遮挡的约束真实场景,但仍难以应对城市的复杂道路交通场景,包括恶劣天气环境,定位信号缺失,目标高度遮挡,有限全局视野,人车交互,车车交互,以及小尺寸目标或干扰目标等。场景动态适应能力问题,即所谓“Long-Tail Challenge” 长尾挑战,依旧是ADS当前待解决的主要难题之一。AVs使用体验数据显示,在暴风雨雪天气,车辆的控制由于打滑和oversteering等原因,目前是远低于用户期望的。
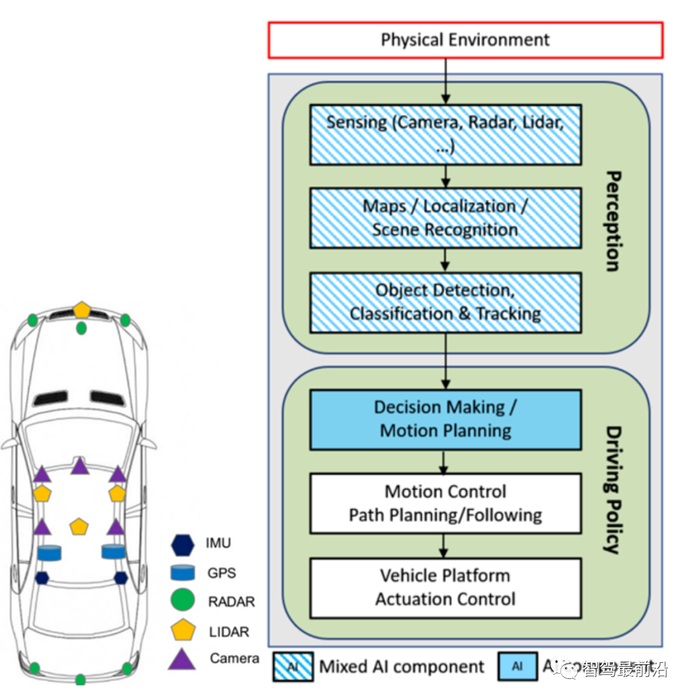
ADS算法的典型系统分层架构如图1所示,一般包括传感层,感知层,定位层,决策层和控制层。每个层面采用传统算法模型或者是与深度学习DNN模型相结合,从而实现ADS全程驾驶的人类可以接受的高可靠和高安全性,以及在这个基础上提供最佳能耗比、最佳用车体验、和用户社交娱乐等基本功能。
ADS传感层的不确定性挑战
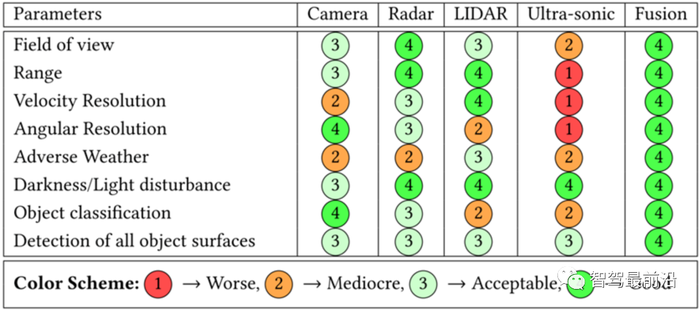

如图2所示,ADS部署的传感器在极端恶劣场景(雨雪雾、低照度、高度遮挡、传感器部分失效、主动或被动场景攻击等)的影响程度是不一样的。所以传感器组合应用可以来解决单传感器的感知能力不足问题,常用的几种组合是:Camera+LIDAR; Radar(3D, 4D)+Camera+LIDAR(LD, HD);Radar+Camera。统计数据表明Radar+Camera是最常见组合。ADS传感层总结如下:
Camera:可以提供360环视和远距前后视角的环境语义表征,但需要一个照明环境,单目和多目Camera可以提供一定程度的目标深度信息;受恶劣场景影响严重;镜头脏污会严重影响图像质量。
LIDAR:可以提供场景的空间信息;但难以检测有反光效应的或者透明的物体;当雨速高于40 mm/hr 到95 mm/hr,信号反射密度严重损失并产生雨枕现象;大雪天气下可视距离缩短并产生反射干扰波形;浓雾场景会产生鬼影现象;温差会产生额外时间延迟。
Radar:对周围车辆检测准确率高,可以提供目标的速度信息,4D Radar还可以提供目标高度的可靠信息;不适合做小目标检测;大雨浓雾和暴风雪会产生接收信号强衰减和斑点噪声,总体对环境的适应性高。
ADS感知层的不确定性挑战
ADS感知层的主要应用场景包括高速公路,城郊与市区道路;十字路口,交通环岛,潮汐公路;隧道,停车场等,其主要任务是基于多模的2D/3D人车物目标识别,动态目标跟踪与速度识别,交通标志识别,车道线识别,红绿灯识别,路面可行驶区域语义分割,路面障碍检测,盲区检测,交通事件检测,司机打瞌睡检测等。与此对应的核心产品特性包括:碰撞预警,紧急刹车,车道偏离预警,传感部分失效预警;车道变道,车道并道,路口通行,行为预测,轨迹预测,轨迹规划;车速控制,转向控制等等。
ADS感知层的第一个挑战是可感知目标距离的挑战。远距离(250-300米)目标感知任务对高速行驶AVs的安全响应速度是至关重要的。对3D目标识别等视觉任务可说,随着感知距离增加,抽取高密度特征的AI主干网络的计算复杂度会按照二次元速度增加,对算力需求也加速度增加。从图3的对比还可以看出,采用长距LIDAR可以提升感知距离,特征点可以覆盖更大的区域但更稀疏,同时也会产生”Centre Feature Missing(CFM)”即点云空心化或者叫黑洞的问题,极端场景包括近距离的超大车辆的中心特征缺失。解决CFM挑战问题的一般方法是在BEV特征空间依赖卷积操作通过特征发散来提供中心区域的感知场,或者通过点云中非空的区域来预测中间空心区目标,代价是目标预测误差和不确定性的输出结果,或者通过连通域打标签CCL进行Instance Point Group进行插值和滤波,以及整个点云的超分变率Super-Resolution来改善性能。

ADS感知层的第二个挑战是目标遮挡即感知盲区的挑战。单纯依赖AVs自身360全方位近距感知和远距感知,很难能够让ADS从理论上完全超越人类的驾驶水平,通过预测预警达到更低的交通事故率和提供更好的人身安全。如图4所示的对比案例,可以看出车路协同可以有效解决盲区与上述所说的长距感知的挑战,但对应的缺点也不言而喻,部署的成本与长期可靠运营费用以及如何防网络攻击问题,这决定了对乡村和偏远地区的场景,需要寻求AVs自身的多模感知认知决策能力提升。


如图5所示,V2X的可行解决方案包括交通要道部署的RSU Camera,LiDAR, 或者Radar,对算法设计来说,需要解决海量点云数据的压缩与实时传输,以及针对接收数据的时间轴同步,多模感知与特征融合目标识别等。目前这个领域基于Transformer在BEV空间进行多任务多模态的融合感知已经有了一些长足进展,融合的方式也可以自由组合,包括多视觉的Camera视频融合,以及 Camera与LiDAR或者Radar的组合融合模式,对点云数据的超分变率会改善融合效果,但融合对延迟非常敏感。
ADS感知层的第三个挑战是恶劣场景的挑战。如图6所示,4D 高清Radar发送的毫米波,可以有效穿越雨滴和雪花,不受低照与雨雪雾天气影响,但会受到多径干扰问题影响,总体来说对环境的适应性高,单独或者组合应用对2D/3D目标检测非常有优势,同时还可以提供高精度的目标高度和速度信息,可以有助于ADS的预测规划性能提升。

图 6. 4D Radar,Camera, LiDAR点云的3D目标检测识别对比案例 (Paek, 2022)
热点文章
-

智能汽车场景化开发:系统融合与 用户体验的协同研究
2026-07-20
-

“泰钽”来了!开启智能越野3.0时代
2026-07-22
-

基于传动效率的多模复合功率分流混合动力系统模式控制研究
2026-07-21
-

乘用车混合动力总成系统设计和性能仿真研究
2026-07-22
-

动力系统主导车市质变,增程器迈入系统竞争
2026-07-23
-

基于深度学习的电驱实验系统设计
2026-07-24
-

-
基于深度学习的电驱实验系统设计
针对传统永磁同步电机建模方法难以兼顾精度与实时性的问题,本文基于深度学习技术提出一种融合物理约束的永磁同步电机降阶模型,通过深度神经网络实现对电机非线性电磁特性的精细化建模。围绕所提降阶模型,搭建了电驱实验系统,并将该模型集成至电驱系统中,实现了实时硬件在环验证。在不同工况下对降阶模型和传统dq轴解析模型开展实验分析,结果表明,所提出的基于深度学习的永磁同步电机降阶模型在保证高精度建模的同时,实现了更好的动态性能。该模型支撑的实验系统可用于电驱系统的快速仿真与控制算法研究,具有良好的工程应用前景。
作者:
-
动力系统主导车市质变,增程器迈入系统竞争
-
“泰钽”来了!开启智能越野3.0时代
-
乘用车混合动力总成系统设计和性能仿真研究
-
基于传动效率的多模复合功率分流混合动力系统模式控制研究
-
智能汽车场景化开发:系统融合与 用户体验的协同研究





评论
加载更多