利用Simulink进行车用嵌入式控制器算法的设计
0 前言
在某款车用嵌入式控制器控制模型的设计中,传统的软件开发流程是先进行需求分析,根据具体的功能需求编写程序,然后做基于台架的程序及数据验证。假如在算法的初级阶段,我们需要验证功能和数据,硬件台架就不是那么方便。
如果能基于MATLAB的Simulink进行建模,并进行算法的验证测试,就方便很多,这样我们就可以在开发初期发现算法中程序错误(BUG),避免在后期发现时,浪费更多的费用及精力来修复这些本可以在前期发现的漏洞。再者,基于Simulink的图形化建模更容易进行仿真,最终会大大提高开发效率。因此,在某款车用嵌入式控制器控制模型的设计开发项目中,我们采用Simulink进行系统的控制算法设计。
1 信号流的模拟
对信号的处理过程有时需要采样处理,例如,一个包含若干个点的数据流按照20kHz的频率发出,在实际的开发过程中,我们需要将它降频到2kHz以下使用。
我们可以在Simulink模块库中寻找相应的信号发生器对该离散的数据信号进行仿真。可以根据需要选择使用重复序列(RepeatingSequence)模块或者从工作空间定义的矩阵读入数据(FromWorkspace)模块等对信号进行模拟,并采用改变采样频率的模块,如速率转换(RateTransition)模块对采样数据进行抽取,并用示波器观察采样前后的数据对比,如图1和图2所示。

图1 原始信号在20kHz时的仿真
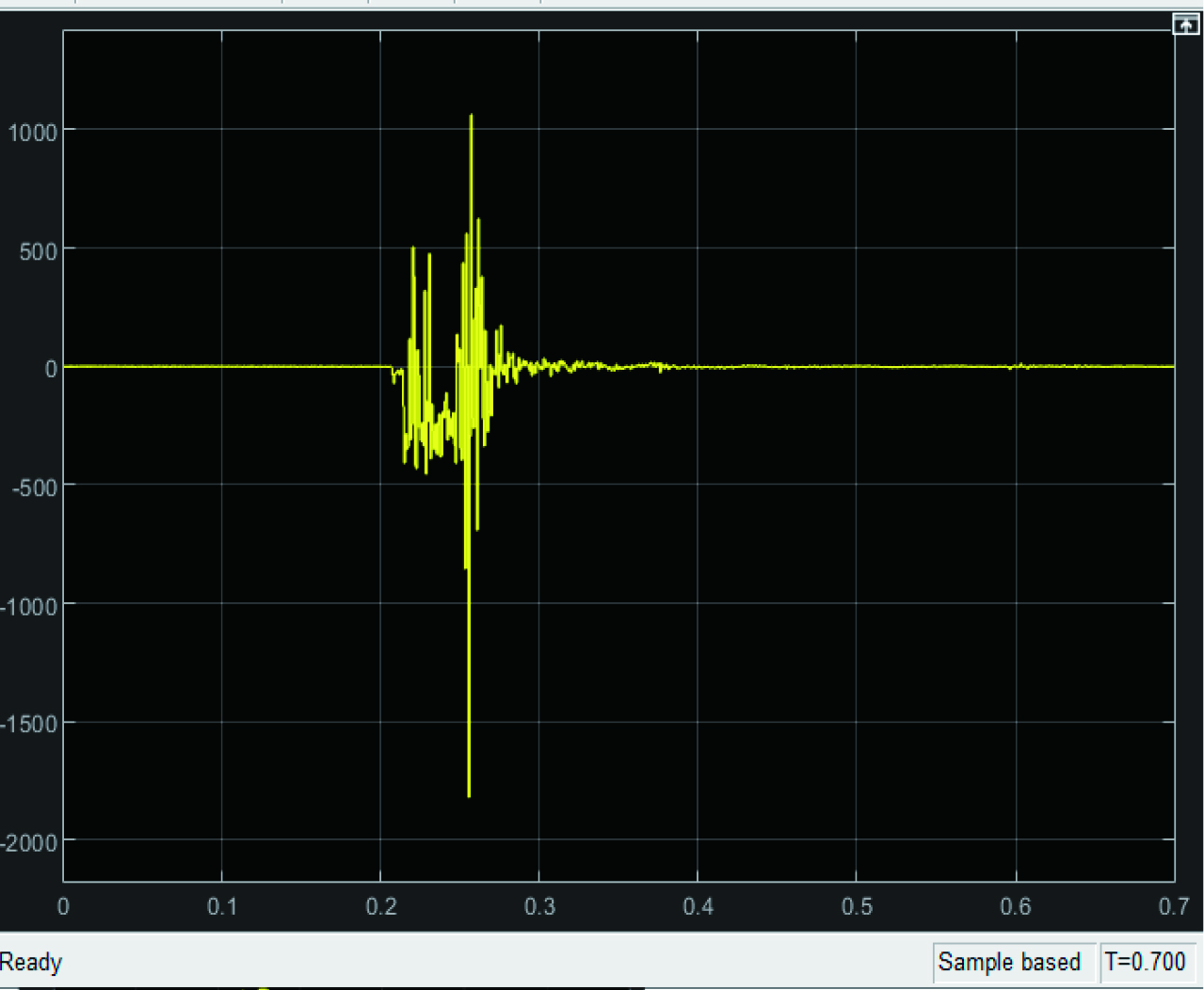
图2 信号降频到2kHz时的仿真
2 信号的低通滤波处理
滤波是对信号的过滤,通过滤除畸变噪声、高频噪声及干扰信号等,尽可能地还原原始数据。常用的滤波有低通滤波、高通滤波及带通或带阻滤波等。我们在数据处理中经常使用低通滤波,低通滤波分为有限脉冲响应滤波器(FIR)和无限脉冲响应滤波器(IIR),如表所示。
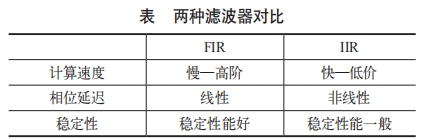
相对于FIR滤波器,IIR滤波器可以使用较低的阶数或项数,这意味着实现相同结果所需的计算量更少,使得IIR滤波器的计算速度更快。若运算数据对时间的响应要求比较严苛,我们可以采用IIR滤波器进行设计。
在设计滤波器之前,我们需要了解信号的采样频率、截止频率以及阶数等参数设置。根据奈奎斯特采样定律:当采样频率fs大于信号中最高频率的2倍时(fs>2fmax),采样之后的数字信号可以完整地保留原始信号中的信息,不发生混叠现象,所以我们的采样频率设置必须大于信号频率2倍以上。
当输入信号的幅值不变,改变输入信号的频率使输出信号降至最大值的0.707倍,此输入信号的频率就是截止频率,也称-3dB截止频率。-3dB截止频率是指信号根据傅里叶变换后,频谱的幅值转换成分贝值20lg(0.707)≈-3dB时的频率。
巴特沃斯低通滤波器可用如下振幅的平方对频率的公式表示:
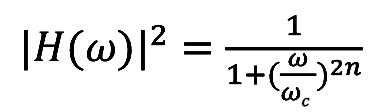
式中,n为滤波器的阶数;ωc为截止频率,即振幅下降为-3dB时的频率。
当滤波器所需的参数计算完成后,我们根据MATLAB自带的工具进行滤波器的设计。在MATLAB的命令窗口键入fdatool或者filterDesigner命令,即可打开滤波器设计窗口,如图3所示。
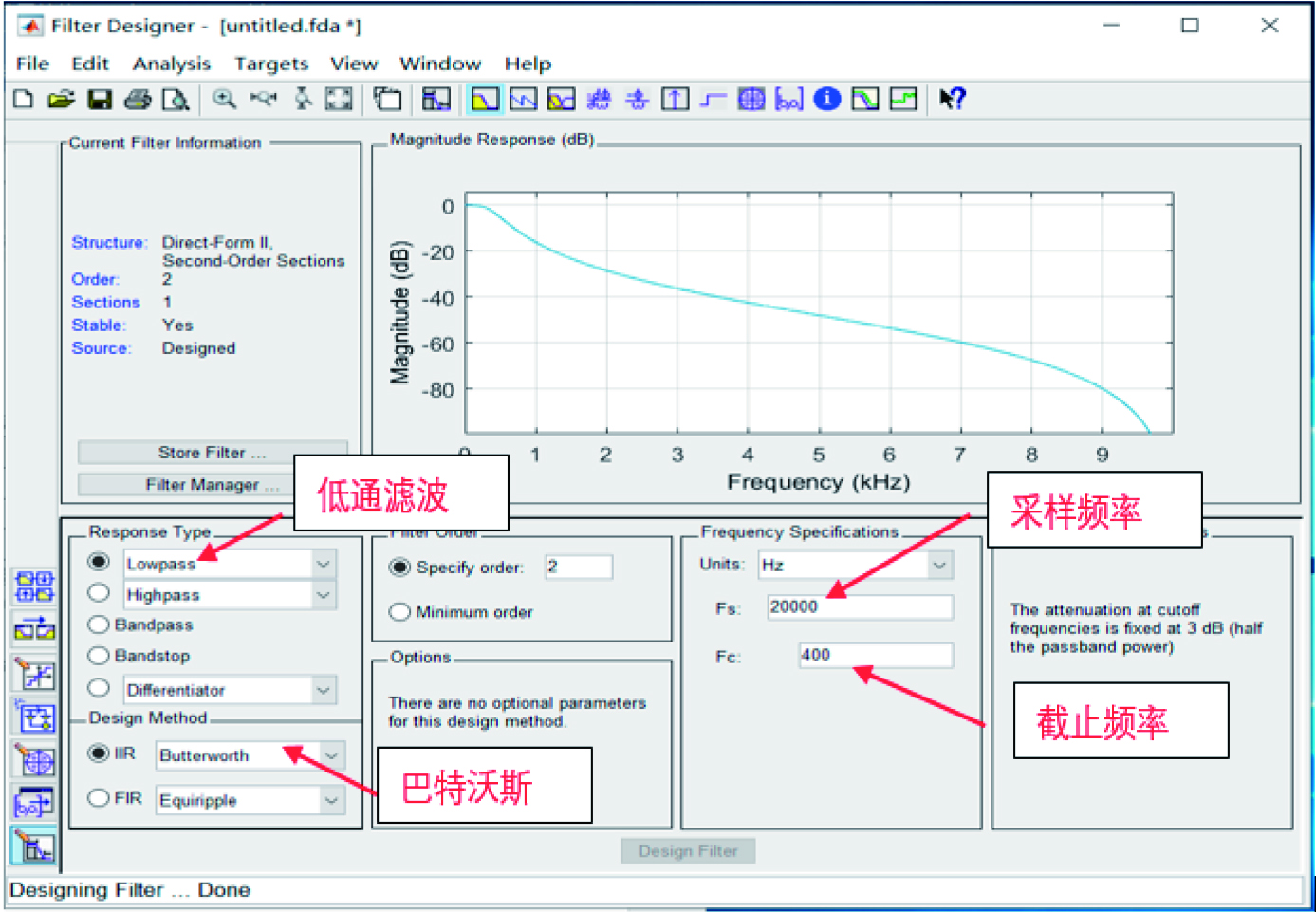
图3 滤波器的设计
根据滤波器的相应类型,我们选择Lowpass低通滤波类型,设计方法选择IIR滤波器中的巴特沃兹滤波。设计完成后,自动生成我们Simulink模型所需要的低通滤波器模块。
从滤波前后的对比图可以看出,信号的噪声干扰明显得到了抑制,如图4所示。对信号进行傅里叶变换后,进行频谱分析,可以看到,在截止频率以后,幅值没有太大的波动,保持在低位,如图5所示。
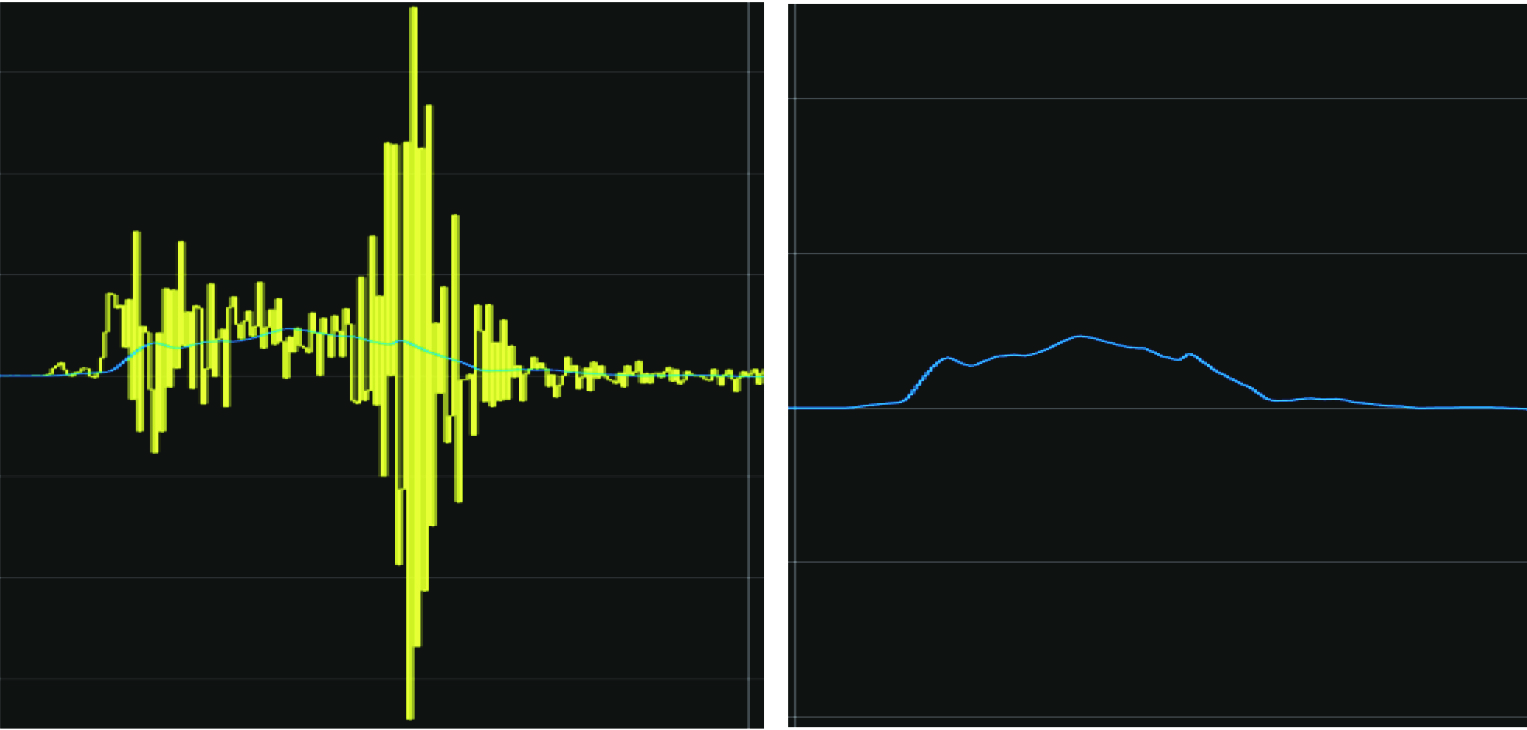
图4 滤波前后对比图和滤波后信号波形
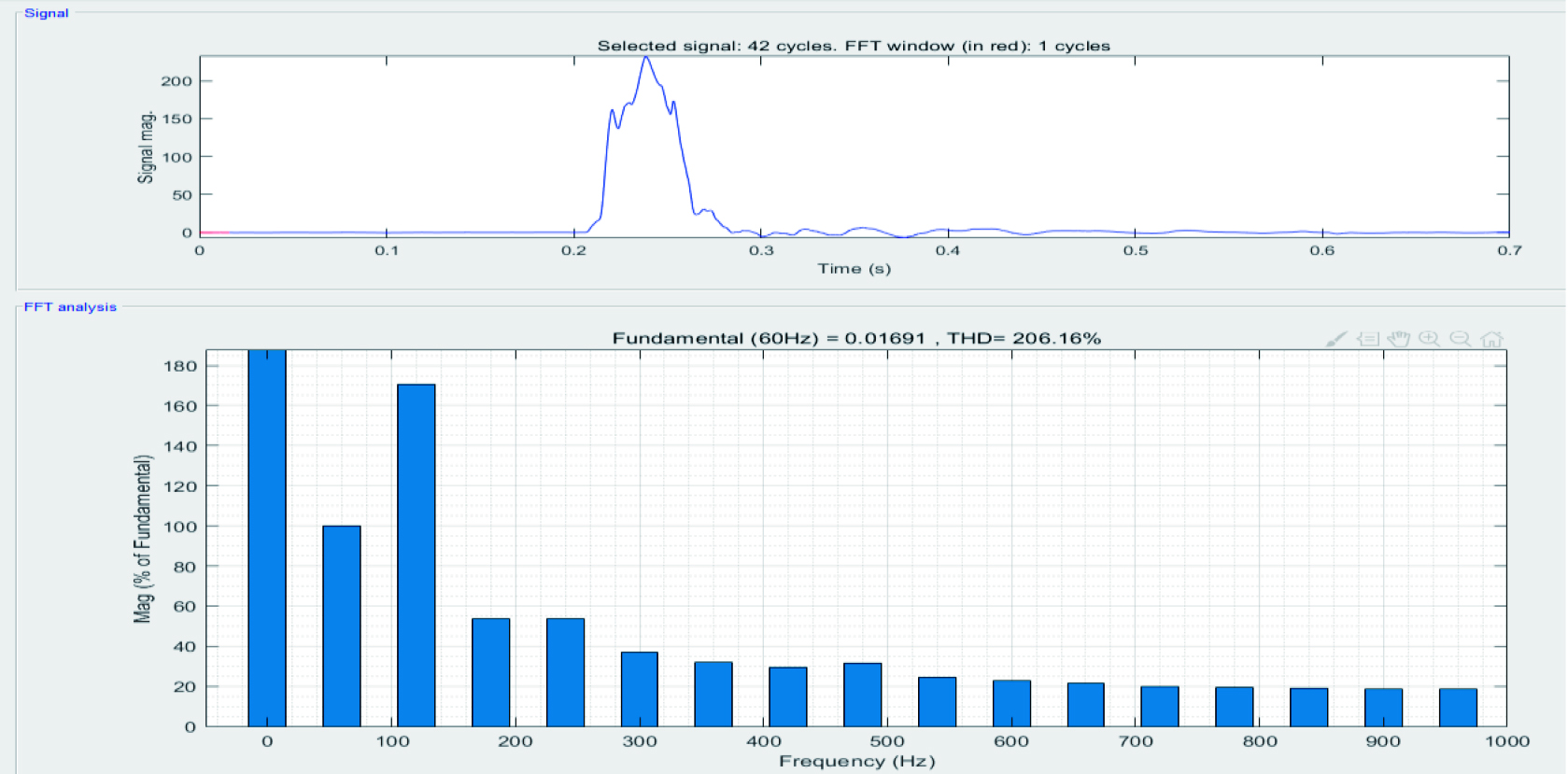
图5 傅里叶变换后的频谱分析
3 低通滤波后的信号处理
信号经过低通滤波后,过滤掉高频噪声,从图4可以看到,信号波形平滑,毛刺较少,在这样的波形基础上,进行信号的再处理,算法模型会比较稳定。如果此时的信号是加速度信号,对信号进行积分后,便可以得到某个时间段内相应的速度信号和位移信号。假定我们设置某个事件触发的阈值为6个单位,当积分后的数据大于等于该阈值时,设定的事件触发。
通过前面步骤的滤波,我们可以看到数据在积分后的曲线比较平滑,没有尖锐的毛刺,这对我们的模型算法的稳定性至关重要,如图6所示。
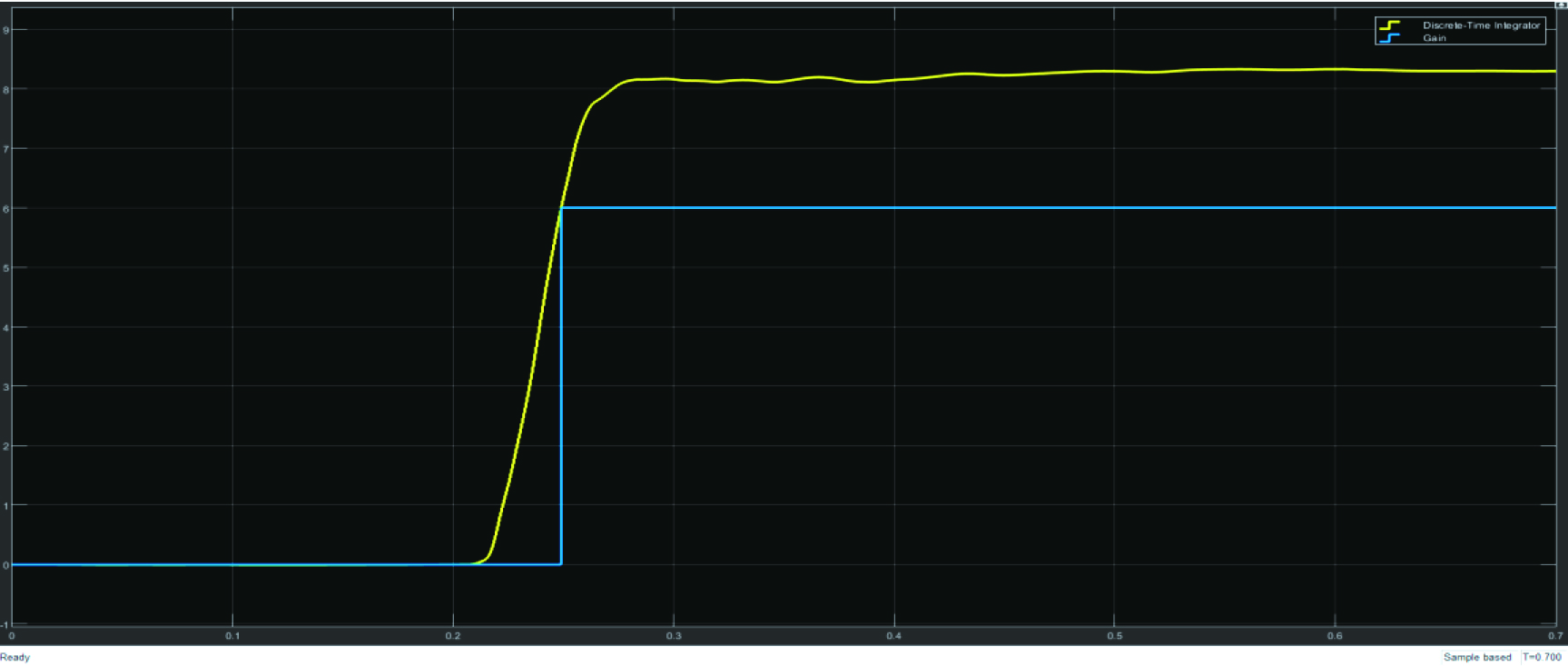
图6 信号触发后的信号观测
4 模型的代码生成
首先,建模后的模型若要生成我们需要的代码,先要能够正常编译通过,然后将模型进行离散,模型中连续的信号将离散化,便于后期集成代码时在任务周期中调用。
生产代码前,还需要对模型进行相关检查,可以使用代码生产检查建议选项,如执行的效率、RAM的有效性检查等。点击运行选定的检查(RunSelectedChecks),可以对选中的模型进行相应的检查,检查后的结果在报告(Report)框中会有一个总体的体现,我们可以参照此报告对不通过的选项进行整改。设置求解器,如固定步求解,求解器选择离散,根据需要选择运行周期时间。设置完成后,模型生成我们需要代码c文件和h文件。
5 仿真标定
编写MATLAB代码,对建模仿真后的模型进行调用,可根据需要设置循环次数及数据记录。首先定义需要加载的模型名称,调用加载函数,使用SIMOUT函数调用模型进行仿真,我们可以在此函数中设置仿真的时长,以及是否需要加载外部的参数输入,假如我们需要从MATLAB代码中输入参数到Simulink模型,则加载外部输入(LoadExternalInput)选择“ON”,否则选择“OFF”。
如果需要把数据存储,调用SAVE相关的函数,如果需要把仿真后的数据导出到Excel,可以选择XLSWRITE相关的函数,或者相关的仿真数据可以直接在OUT相关的数据结构体中进行查看,在实际应用的过程中我们可以通过多种方式记录仿真后的数据,以便进行后续的数据分析。
6 结论
传统的开发模式,我们使用评审的方法去发现错误,参加评审的同事,往往没有足够的时间了解正在评审的工作,可能会发现一些非常明显的问题,但很难发现一些真正关键的问题。而建模仿真,从效率上来讲,远高于评审,仿真更容易发现设计中的问题。当运行仿真模型时,输入一些设定参数,我们就会得到相应的输出,这样很容易观察到此时的输出是不是我们想要的,输入确定,从而期望的输出结果确定,这便是建模仿真的优势。
Simulink与MATLAB相集成,能够在Simulink中将MATLAB算法融入模型,还能将仿真结果导出至MATLAB做进一步分析。本次设计以建立简单模型并生成代码的形式,展示了建模仿真的基本流程,方法简单,经测试生成的代码可以可靠运行,便于推广。
本文为“AI汽车制造业”首发,未经授权不得转载。版权所有,转载请联系小编授权(VOGEL100)。本文作者:周伟丽 魏敏 田国强,单位:上汽通用五菱汽车股份有限公司。责任编辑龚淑娟,责任较对何发。本文转载请注明来源:AI汽车制造业
AI汽车制造业
龚淑娟
李峥
热点文章
-

智能汽车场景化开发:系统融合与 用户体验的协同研究
2026-07-20
-

“泰钽”来了!开启智能越野3.0时代
2026-07-22
-

基于传动效率的多模复合功率分流混合动力系统模式控制研究
2026-07-21
-

乘用车混合动力总成系统设计和性能仿真研究
2026-07-22
-

动力系统主导车市质变,增程器迈入系统竞争
2026-07-23
-

基于深度学习的电驱实验系统设计
2026-07-24
-

-
基于深度学习的电驱实验系统设计
针对传统永磁同步电机建模方法难以兼顾精度与实时性的问题,本文基于深度学习技术提出一种融合物理约束的永磁同步电机降阶模型,通过深度神经网络实现对电机非线性电磁特性的精细化建模。围绕所提降阶模型,搭建了电驱实验系统,并将该模型集成至电驱系统中,实现了实时硬件在环验证。在不同工况下对降阶模型和传统dq轴解析模型开展实验分析,结果表明,所提出的基于深度学习的永磁同步电机降阶模型在保证高精度建模的同时,实现了更好的动态性能。该模型支撑的实验系统可用于电驱系统的快速仿真与控制算法研究,具有良好的工程应用前景。
作者:
-
动力系统主导车市质变,增程器迈入系统竞争
-
“泰钽”来了!开启智能越野3.0时代
-
乘用车混合动力总成系统设计和性能仿真研究
-
基于传动效率的多模复合功率分流混合动力系统模式控制研究
-
智能汽车场景化开发:系统融合与 用户体验的协同研究





评论
加载更多