一种混合动力汽车的整车驾驶扭矩控制逻辑设计与应用
0 前言
混合动力汽车的整车驾驶扭矩控制是指整车控制器(VCU)通过控制发动机、前电机和后电机输出扭矩来满足驾驶员扭矩需求,保证车辆稳定运行的逻辑。这一逻辑涉及到多个系统的协调工作,包括整车控制器(VCU)、发动机管理系统(EMS)、前驱动电机(FMCU)、后驱动电机(RMCU)、变速器控制系统(TCU)和车辆稳定控制系统(ESP)等,图1所示为Hi4扭矩控制架构。
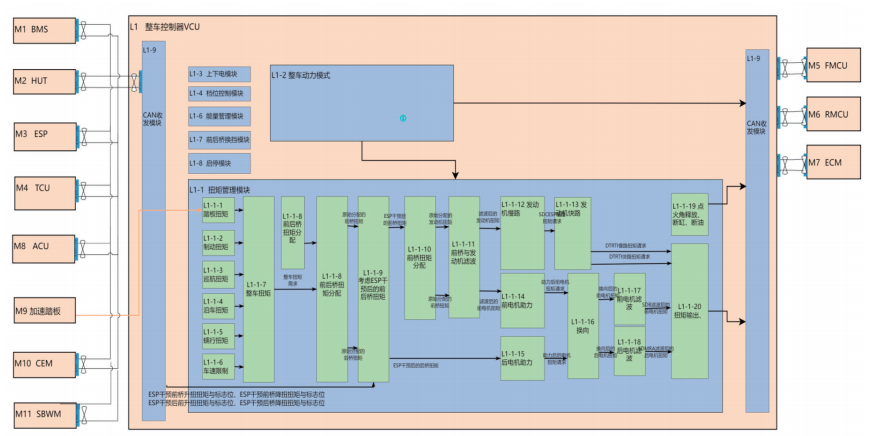
图1 Hi4扭矩控制架构
混合动力车型的架构也较多,有增程式、非增程式,有两驱、有四驱,前桥有双电机(GM与TM)、有单电机如图2所示,Hi4动力架构属于非增程式四驱架构,前桥一个发动机与一个前电机,前电机在电池亏电的时候,进入串联,起到发电机的作用,在电池不亏电的时候起到驱动电机的作用;后桥一个后电机,为驱动电机。
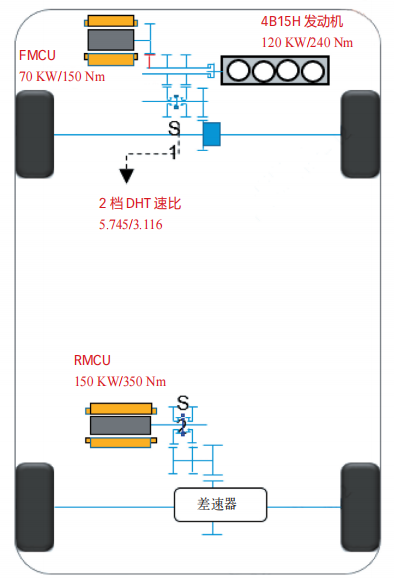
图2 Hi4动力架构
1 整车扭矩控制逻辑
整车控制器扭矩控制逻辑主要涉及:整车扭矩需求(VTD)、整车扭矩分配(VMM)、扭矩滤波(ASD)与扭矩动态协调(CorPt),如图3所示。
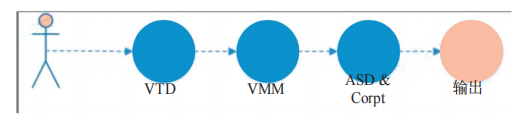
图3 DHT—2扭矩框架
1.1 整车扭矩需求
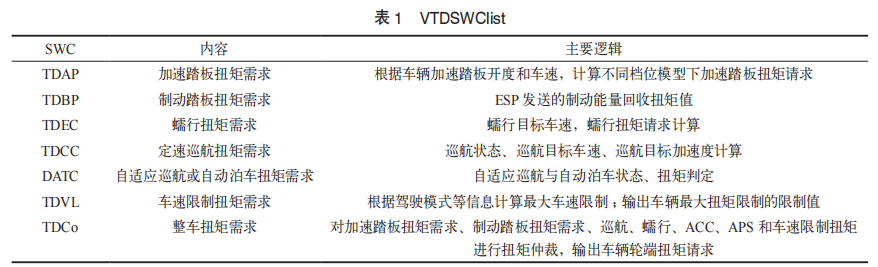
整车扭矩需求(VTD)部分主要是根据驾驶员加速踏板扭矩、制动踏板扭矩、蠕行扭矩、是否开启定速巡航、自适应巡航及自动泊车等功能,综合协调各部分的扭矩需求,最终输出整车轮端扭矩请求,给扭矩路径使用。如果有限制整车车速工况,整车扭矩不能超过限制车速的的最大扭矩,见表1。
VTD整车扭矩需求部分,各个架构策略一致,可平台化开发。
1.2 整车扭矩分配
整车扭矩分配部分包括TTDAR、TTDA、VMCo与VMEE,主要根据VTD输出的整车扭矩需求,通过考虑驾驶模式、ESP前后桥干预等情况进行前后桥扭矩分配,见表2。
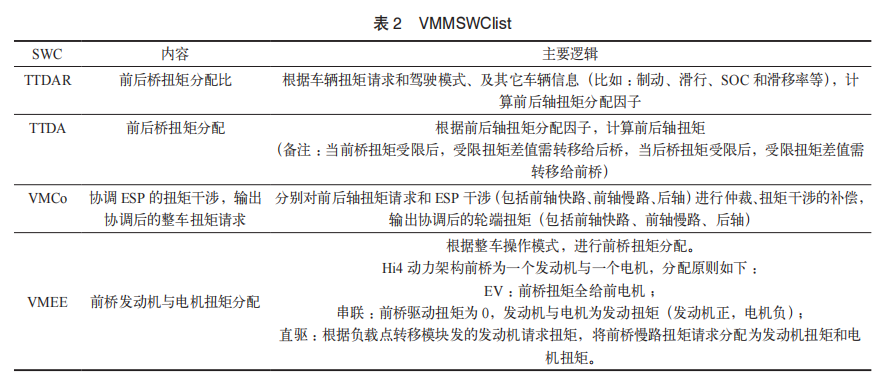
VMM整车扭矩分配部分,TTDAR、TTDA与VMCo各个架构策略一致,可平台化开发;VMEE各架构策略不同,需根据整车操作模式,进行前桥扭矩分配。Hi4架构前桥为一个发动机与一个电机,分配原则如下:EV,前桥扭矩全给前电机;串联,前桥驱动扭矩为0,发动机与电机为发动扭矩(发动机正,电机负);直驱,根据负载点转移模块发的发动机请求扭矩,将前桥慢路扭矩请求分配为发动机扭矩和电机扭矩。
1.3 扭矩滤波与扭矩动态协调
扭矩滤波与扭矩动态协调(部分主要根据EV、EVIdle、串联、直驱和低速直驱五种驱动模式,计算对应模式下的整车动态的扭矩滤波与协调。
其中SDFA、SDB与SDMRA分别为前桥、前电机与后电机的扭矩滤波模块,均采用六段式扭矩滤波方式,该方法通过将输入扭矩根据扭矩方向和阶段划分为六段,分别为正向的Lo—Pos、Mid—Pos及Hi—Pos和负向的Lo—Neg、Mid—Neg和Hi—Neg,通过分段的方式对扭矩信号进行处理,具有不同的响应速度,来平衡整车的“动力性”与“平顺性”,以达到更好的滤波效果,如图4所示。
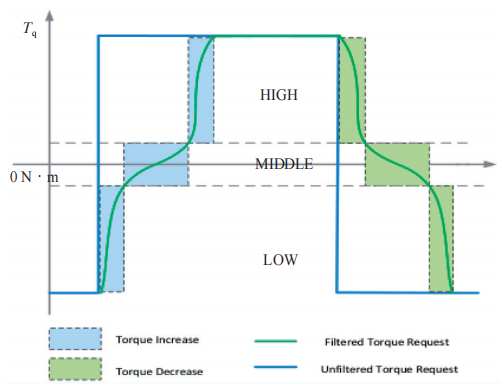
图4 扭矩六段式滤波
六段式扭矩滤波方式:判断滤波前扭矩与滤波后扭矩的差值Trqd是否大于0,若Trqd>0(cali)表示扭矩呈上升趋势,扭矩方向为Positive,若Trqd<0(cali)表示扭矩呈下降趋势,扭矩方向为Negative。判断滤波后的扭矩值,当TrqLimd<-20(cali)说明扭矩处于Low阶段,当-20(cali)<TrqLimd<20(cali)说明扭矩处于Medium阶段,当TrqLimd>20(cali)说明扭矩处于Hight阶段。不同的扭矩区间允许的扭矩变梯度不同,若扭矩在Medlium阶段,允许的扭矩变变化梯度小(cali,300Nm/s),防止执行器电机过零变化快引起闯动问题,若扭矩在Low/High阶段,允许的扭矩变化梯度大(cali,1500Nm/s)。除区域的扭矩基础梯度值不同,还会基于驾驶模式、制动踏板、挡位和当扭矩方向为Positive时,滤波后扭矩=上一次滤波后扭矩+扭矩梯度(cali,基于Low/Medium/High区间可标),然后受区域上限+偏移量(cali,初始值0.5N·m)与滤波前扭矩的扭矩取小限制,防止扭矩跨阶段后扭矩变化与允许梯度不符,也防止滤波后扭矩超过原始扭矩值;当扭矩方向为Negative,滤波后扭矩=上一次滤波后扭矩—扭矩梯度(cali,基于Low/Medium/High区间可标),然后受区域下限—偏移量(cali,初始值0.5N·m)与滤波前扭矩的扭矩取大限制,防止扭矩跨阶段后扭矩变化与允许梯度不符,也防止滤波后扭矩超过原始扭矩值。通过大量实车测试,不同项目不同车型扭矩方向、阶段和梯度等标定量的标定值均不完全相同,但整体原则一致,因地制宜的细节差异化标定,更好地适配出车辆的最优动力方案。
SDCESP、DTRTI、CEIAR分别为发动机的慢路滤波模块、快路滤波快路干预模块、快路扭矩计算与发动机降扭请求(点火角释放、断缸和断油)模块。Hi4架构换模换挡时,TCU会干预发动机快路到0N・m,慢路到30N・m,换模换挡的完成后,扭矩恢复;低速直驱时会干预发动机扭矩不能超过离合器传递能力,其他稳定工况没有发动机干预,扭矩等于前边SWC正常分配的扭矩值,见表3。
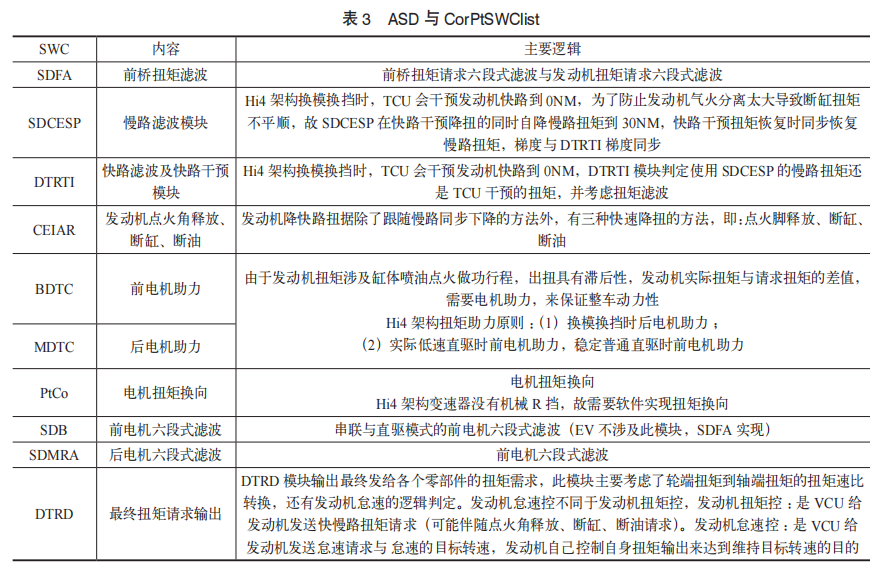
BDTC与MDTC与分别为前电机扭矩需求与助力扭矩计算模块、后电机扭矩需求与助力扭矩计算模块。扭矩助力指由于发动机自身响应的滞后性或者有干预降扭的工况,导致发动机实际与原始扭矩请求有diff值,这个diff值需要由电机进行扭矩助力,否者整车扭矩与原始扭矩请求不符。Hi4架构扭矩助力原则:换模换挡时后电机助力,实际低速直驱时前电机助力,稳定普通直驱时前电机助力,见表3。前电机助力计算方法:普通直驱时,前电机助力=SDFA前桥扭矩–SDFA电机扭矩–CANR发动机实际扭矩;低速直驱时,前电机助力扭矩=SDFA前桥扭矩–SDFA电机扭矩–CANRTCU离合器实际传递扭矩。后电机助力计算方法:后电机助力扭矩=VMCo前桥扭矩–BDTC电机扭矩–CANR发动机实际扭矩,备注:N挡的时候,默认BDTC电机扭矩与CANR发动机实际扭矩使用0替代,即后电机助力扭矩=VMCo前桥扭矩,如图5所示。
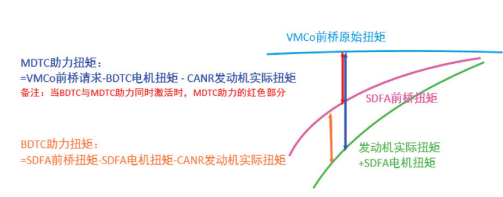
图5 助力扭矩
最后DTRD模块输出最终发给各个零部件的扭矩需求,此模块主要考虑了轮端扭矩到轴端扭矩的扭矩速比转换,还有发动机怠速的逻辑判定。发动机怠速控不同于发动机扭矩控,发动机扭矩控是VCU给发动机发送快慢路扭矩请求(可能伴随点火角释放、断缸、断油请求)。发动机怠速控是VCU给发动机发送怠速请求与怠速的目标转速,发动机自己控制自身扭矩输出来达到维持目标转速的目的。
ASD与CorPt部分各个模块的策略与动力架构紧密相关,各不相同,各架构需独立开发。
2 应用
混合动力汽车的扭矩控制逻辑高度复杂,涉及多个子系统的协同工作,包括发动机管理、前电机控制、后电机控制、离合器挡位控制、电池管理系统(BMS)以及底盘车身稳定干预、智驾扭矩请求等。这些系统通过复杂的算法和控制策略,确保车辆在各种驾驶条件下都能高效、安全地运行。
Hi4架构虽然比以往混合动力架构(GM+TM+RMCU)缺少一个发电机,但是通过合理的利用前电机FMCU,实现了FMCU不工况不同作用的目的,在保证功能不降级的情下,降低了整车配重,有效提高整车动力性能;节约了整车成本,更直接的价格优惠于客户。
参考文献
[1] 李明,王伟.混合动力汽车技术[M].北京:机械工业出版社,2015.
[2] 张华,陈丽娟.新能源汽车技术与应用[M].北京:清华大学出版社,2018.
[3] 王强,赵志刚.混合动力汽车控制系统设计与优化[J].汽车工程,2019,41(5):789-795.
本文为“AI汽车制造业”首发,未经授权不得转载。版权所有,转载请联系小编授权(VOGEL100)。本文作者:卢娜 张南 李雷,单位:长城汽车股份有限公司技术中心、河北省汽车工程技术研究中心。责任编辑龚淑娟,责任校对何发。本文转载请注明来源:AI汽车制造业
AI汽车制造业
龚淑娟
李峥
相关推荐
-

汽车总装“智”造的探索与应用
通过介绍返修车辆定位和抢单系统、灯光拣选和备胎自动搭载的解决方案和成果,从车辆检测返修流程(检测)、工艺装配指导(装配)及设备自动化(设备)三个案例阐述汽车总装车间在智能制造方面的探索和应用。改善装配效率和质量,优化返修流程,提升管理体系水平,将成为汽车公司往数字化、智能化方面的转型发展的必然趋势。
2025-10-20
-

汽车总装标准工时设计及应用
本文针对汽车制造企业中的总装标准工时设计进行了深入研究。通过分析汽车总装工艺流程、工时构成及影响要素,探讨了标准工时设计的原则和方法,并提出了优化策略。研究结果表明,科学合理的标准工时设计能够有效提高生产效率,降低生产成本,为企业提供可靠的决策依据。
2025-10-17
-

算力 —— 舱驾 AI 进化的核心燃料
本文提出算力是车载端侧舱驾 AI 进化的核心燃料这一核心观点,其需求随高级辅助驾驶等级提升呈指数级增长。生成式 AI 的发展也推动着智舱向多模态乃至全模态体验跃迁。NVIDIA 通过芯片架构的代际创新、成熟的软件生态、安全与算力的协同设计及高带宽支撑,重构了车载计算底层逻辑;同时,其构建的车企合作矩阵、传感器与算法生态及云端训练体系形成开放技术联盟和算力闭环,在功能安全与智驾产品安全标准上树立行业标杆,持续推动舱驾 AI 持续进化。
2025-10-17
热点文章
-

-

智能网联汽车轨迹优化方法研究综述
2026-07-07
-

看见·增程的“第二生长曲线”
2026-07-14
-

中国企业出海中的人才战略与文化融合
2026-07-07
-

面向ISO 34505的自动驾驶场景评价及测试优先级分析
2026-07-13
-

浅谈智能座舱与人机交互技术创新
2026-07-14
-

连接器如何破局?莫仕携“系统级决绝方案”迈入新阶段
2026-07-08
-
浅谈智能座舱与人机交互技术创新
在汽车电动化、智能化、网联化深度融合的产业趋势下,智能座舱已从配置竞争转向技术体系与落地能力的竞争。本文以零跑汽车为案例,从中央集成电子电气架构、高算力硬件、自研车机操作系统、多模态交互、舱驾融合以及车载大模型六大技术维度,对智能座舱与人机交互关键技术进行深入解析,并聚焦底层技术实现、工程化落地、量产应用效果与成本控制逻辑。研究表明,零跑汽车实现了高阶智能技术的大众化,为自主品牌提供了可复制的实践路径,验证了技术落地成效,并指明了未来优化方向。
作者:
-
看见·增程的“第二生长曲线”
-
面向ISO 34505的自动驾驶场景评价及测试优先级分析
-
国产化替代正当时:永铭车规级固液混合电容,为激光雷达发射端与算力核心提供高纹波耐受解决方案
-
智能网联汽车轨迹优化方法研究综述
-
AI《汽车制造业》增刊





评论
加载更多