汽车区域架构中的 TSN:启用以太网环形架构和 AVB 分布式音频
该行业正面临对更高带宽与更快速通信网络的迫切需求,以便在整车范围内传输安全关键型和时间敏感型数据。在下一代区域架构中,他们正研究以太网环形架构,以实现冗余设计。同时,他们也在尝试将更多类型的数据(包括音频)整合至以太网主干中,以减少线束。
区域架构通过区域控制模块 (ZCM),将来自各类传感器与电子控制单元 (ECU) 的数据,传输至边缘节点通信网络。随后,如图 1 所示,这些 ZCM 会通过主干通信,将汇总后的传感器数据发送至中央计算单元 (CCU)。
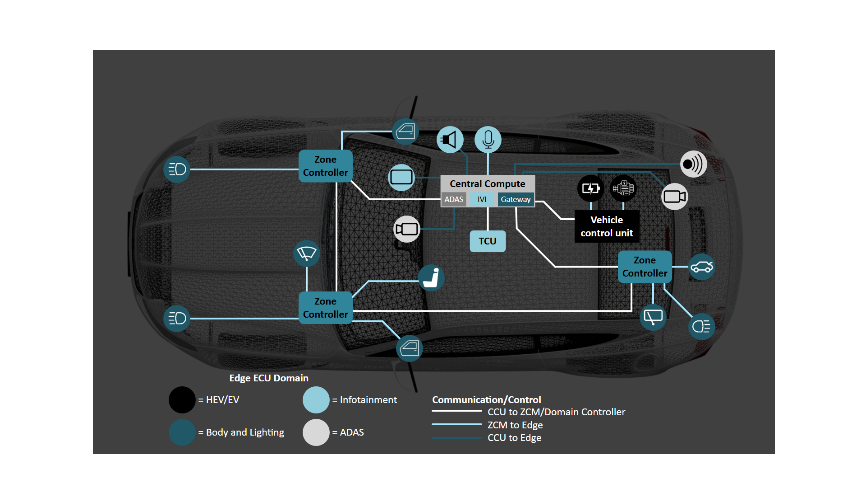
图 1 适用于区域架构的车载网络
以太网环形架构是在现有的高带宽以太网主干基础上构建的,通过让每个节点同时与两个相邻节点相连,实现了网络冗余。由于数据可以在顺时针与逆时针两个方向同时传输,即使某一条以太网链路发生中断,CCU 仍能与 ZCM 保持通信。
随着车载网络带宽的提升,主干以太网可传输更多类型的数据,例如音频、雷达和摄像头数据。在汽车制造商逐步过渡到区域架构的早期阶段,他们主要将车身功能整合进各个区域模块中。但理想的区域架构应当能够支持跨域应用。音频是主要目标,这是因为 AVB 标准能够为音频数据提供确定性的延迟。将音频播放功能移入 ZCM 后,由于音频数据可以通过以太网传输,因此可以无需单独的通信总线。
启用实时控制和时间敏感型数据
TSN 可确保通过以太网网络中时间敏感型数据的同步。在车载网络中增加时间敏感型数据并启用实时控制,会提升系统对 CCU 与各区域间高速通信链路可靠性的要求。因此,以太网环形架构提供的冗余支持对 TSN 应用(包括以太网 AVB)非常有利;但需要注意的是,环形架构并非 TSN 的必需条件,反之亦然。
定义 TSN 的几项协议包括:
· 电气电子工程师学会 (IEEE) 802.1AS — 通用精确时间协议 (gPTP),提供具有确定性延时、低数据包延迟差异和低数据包丢失的数据同步功能。
· IEEE 802.1Qbv — 流量调度增强。
· IEEE 802.1Qav — 支持 AVB。
虽然以太网环形架构并非必须使用 TSN,但 TSN 有助于保证低确定性延时。IEEE 802.1AS 定义了一种数据同步方法,精度可达毫秒到纳秒级。这种精度水平对以太网环形架构有益,可在数据包处理与传输过程中,通过应用调整和时序补偿来抵消偏移延时。此外,IEEE 802.1Qbv 还支持调度流量增强,这有助于对以太网主干数据进行优先级管理与调度。
TSN 对于音频数据是必需的,因为它能够确保即使路径延迟不同,车内各位置的音频播放依然保持同步。IEEE 802.1Qav 定义了 AVB 支持,用于通过以太网传输音频和视频数据。
以太网拓扑:环形与星形
许多第一代区域架构采用星形拓扑,其中 CCU 与每个 ZCM 通过点对点以太网直接连接。因此,每个 ZCM 之间的通信要么通过 CCU 转发,要么通过额外的点对点以太网连接,实现从右侧 ZCM 到左侧 ZCM 的直接区域间通信。另一种方式是环形拓扑,即将所有节点连接成闭环,使数据可以在环路中以顺时针和逆时针进行双向传输。图 2 中比较了环形拓扑与星形拓扑的差异。
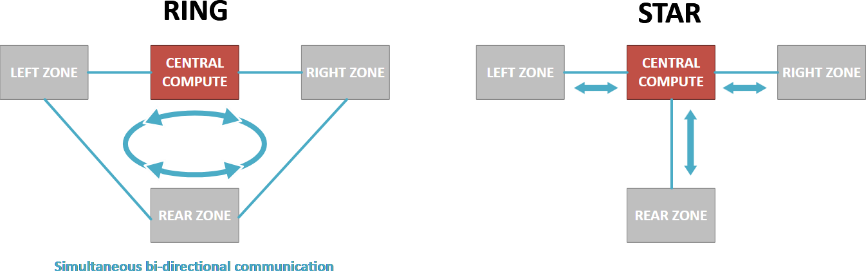
图 2 正常运行中的环形与星形通信路径
图 3 演示了以太网链路发生故障时的两种拓扑的表现情况。环形拓扑通过交替的单向以太网保持与所有区域的通信。此外,环形拓扑通过双向同时传输数据消除了切换时间,因此即使一条路径发生故障,数据也能立即沿另一条路径继续传输,这对于 ECU 间安全关键型数据的传输至关重要。相比之下,当星形拓扑网络中的某条以太网连接断开时,与该 ZCM 的所有通信将立即中断,迫使其进入受限运行模式,并回退至预设的安全状态。
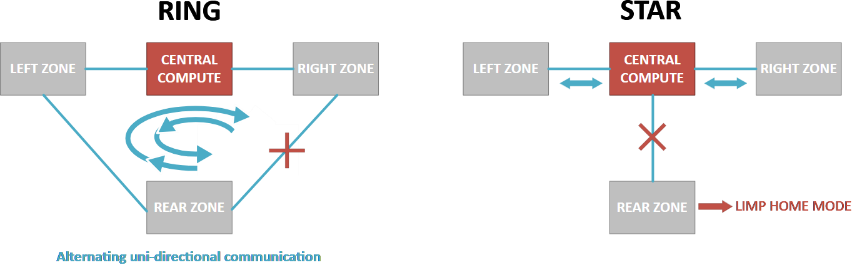
图 3 以太网连接中断时的环形与星形通信路径
以太网环形架构本身具备冗余特性,而星形架构则需要额外的通信链路才能实现同等保护,如图 4 所示。为每个 ECU 添加重复的通信链路(如以太网或 CAN)会增加系统成本和车重。
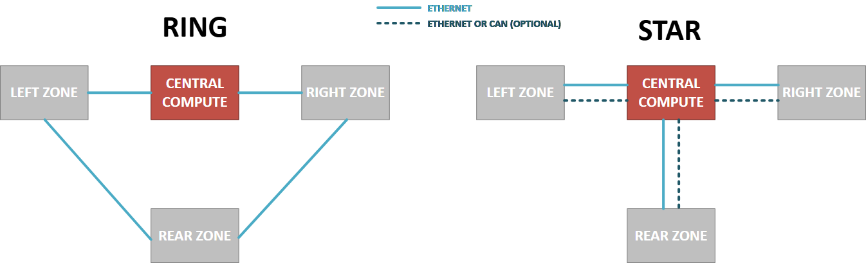
图 4 环形拓扑与星形拓扑中的冗余
以太网环形架构的一个缺点是,节点数量增加会导致 ECU 间的端到端延时上升。例如,具有四个节点的以太网环形架构的端到端延时比具有三个节点的以太网环形架构更高。这种额外延时主要来源于每个 ECU 交换机中的数据包残留延迟以及数据包复制的软件延时,如图 5 所示。
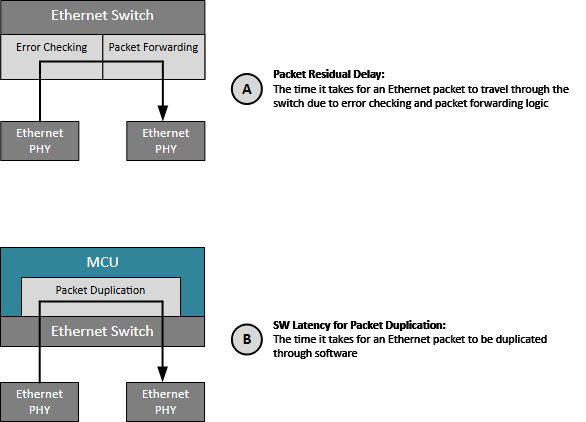
图 5 软件中的数据包残留延迟和数据包复制
表 1 计算了额外延时。
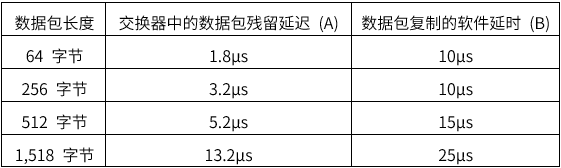
表 1 软件中残留数据包延迟和数据包复制导致的以太网环延时
表 1 假设条件:每秒 2,000 个数据包 (PPS),1Gbps 以太网,CPU 以 400MHz 运行(单核,负载小于 60%)。
公式 1 将以太网环形架构的端到端延时表示为:
方程式 1. 
其中 A 是交换机中的数据包残留延迟,B 是数据包复制的软件延时。
以太网环形架构实施
以太网环形架构的实施需要在每个节点上配置微控制器 (MCU)、以太网交换机以及两个以太网物理层 (PHY)。MCU 负责对数据进行封装与解封装,将其他数据包转换为以太网数据包,反之亦然。以太网交换机提供硬件卸载支持,包括数据包的转发、复制、环路终止以及重复数据包的检测与丢弃等功能,这些均遵循 IEEE 802.1cb 标准(如果硬件不支持,也可通过软件实现)。目前存在三种不同的实施选项,如图 6 所示。
• 具有外部以太网交换机和外部以太网 PHY 的 MCU。
• 具有集成式以太网交换机和外部以太网 PHY 的 MCU。
• 带有集成式以太网 PHY 的外部以太网交换机的 MCU(也可将外部 PHY 与集成 PHY 结合使用)。
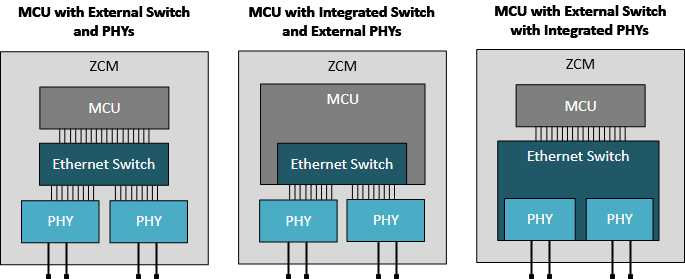
图 6 以太网环形硬件实施选项
在选择不同的硬件实施时,需要考虑成本、应用与延时。通常情况下,集成式交换机的成本低于外部交换机。区域控制器通常只需五个或更少的以太网连接即可与其他高速 ECU(例如 ZCM、CCU 和雷达模块)进行通信。然而,大多数可用的以太网交换机都配备了八个或更多端口,当系统仅需五个或更少端口时,这会造成系统成本的增加。
支持 IEEE 802.1cb 等高级协议的硬件加速型以太网交换机(无论是集成式还是外部),能够显著降低延时;相比之下,基于软件实施的方案通常会增加约 20μs 的延时。同时,具备 IEEE 802.1Qbv 功能的交换机还能通过优先级队列优化流量调度,进一步减少延时。TI 提供多种 MCU,支持通用平台交换机 (CPSW)、IEEE 802.1Qbv 以及类似于 IEEE 802.1cb 中的功能。
图 7 展示了使用具有集成 CPSW 和外部以太网 PHY 的 TI MCU (AM263P4-Q1) 的以太网环形实施。
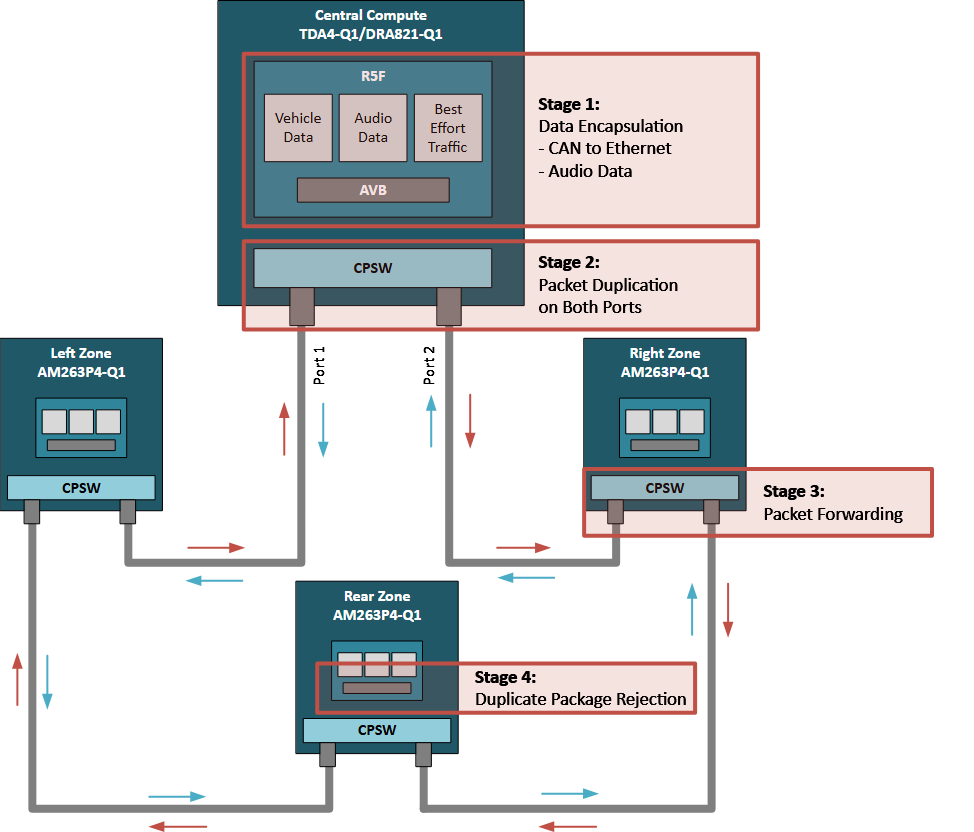 图 7 使用 AM263P4-Q1 的以太网环形实施
图 7 使用 AM263P4-Q1 的以太网环形实施
以太网环形实施过程从 MCU 内的数据封装开始,如阶段 1 所示。这些数据可以包括来自 CAN、局域互联网络、其他汽车接口的高优先级车辆数据、音频数据以及非保证服务流量。在阶段 2,系统在两个以太网端口对数据包进行复制,以顺时针和逆时针两个方向发送数据;这一复制可通过软件或硬件完成,具体取决于交换机的能力。AM263P4-Q1 能够通过硬件实现这一点。
在阶段 3,当节点接收到的数据的目标媒体访问控制 (MAC) 地址与 PHY 的 MAC 地址不匹配时,以太网交换机会将该数据包转发到环形中的下一个节点。在阶段 4,目标节点会通过软件或硬件丢弃重复的数据包,使 ZCM 无法处理从两个方向到达的相同数据包。环形终止也与重复数据包抑制协同工作,以防止环形内的冗余帧无限循环。
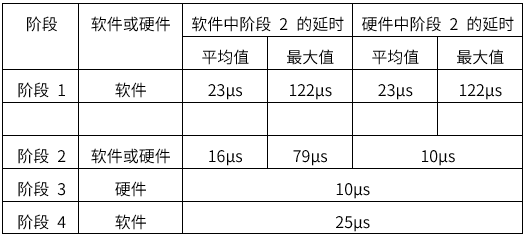
TI 的 AM263P4-Q1 MCU 非常适合以太网环形应用,因为其 CPSW 在硬件中实现了数据包复制,从而使得在 1Gbps 以太网条件下端到端延时最多可减少约 69μs。表 2 比较了基于软件与基于硬件的数据包复制在各阶段的延迟,假设每秒 10000 个数据包且载荷为 1500 字节。
表 2 软件与硬件中存在数据包复制延时
使用 AVB 将音频播放添加到以太网主干中
尽管 AVB 并不要求使用环形架构,但环形架构提供的冗余可让更多数据安全地通过 ZCM。AVB 的出现早于 TSN,最初专注于音频应用,随后扩展为支持更广泛数据类型的 TSN。如今,AVB 通常指面向音频的 TSN 应用,通过以太网传输音频数据包,将音频播放分发到各个区域模块。主要的 AVB 协议包括:
• IEEE 802.1BA — 用于架构和配置文件的 AVB 框架。
• IEEE 802.1Qav – 时间敏感型网络的 AVB 流量调度。
• IEEE 1722 – AVB 传输协议。
音频播放需要以设定的采样速率向音频放大器传输音频数据。为了在多个区域同时播放音频,每个区域必须保持时间对齐,以避免因相位错位造成的音频保真问题。AVB 通过补偿以太网网络中数据包延时的差异,可确保 ZCM 间音频播放保持一致且时间对齐。
区域架构中的音频
通常情况下,车辆会处理四种类型的音频数据:
• 通过麦克风捕捉的人声,用于免提通话。
• 通过路面传感器或麦克风捕捉的噪声,用于主动降噪 (ANC)。
• 在车内扬声器播放的音频,用于娱乐系统和 ANC。
• 在混合动力汽车和电动汽车外部扬声器播放的音频,用于声学车辆警示系统。
目前典型的音频解决方案通常使用独立的专有音频总线或模拟信号在车辆内部传输音频数据。而以太网 AVB 则是一种非专有解决方案,通过利用现有以太网主干,将音频播放数据从 CCU 传输到各区域模块,从而减少布线。在以太网总线上,车内扬声器音频播放是首个被采用的音频数据类型。图 8 展示了其实施方法。
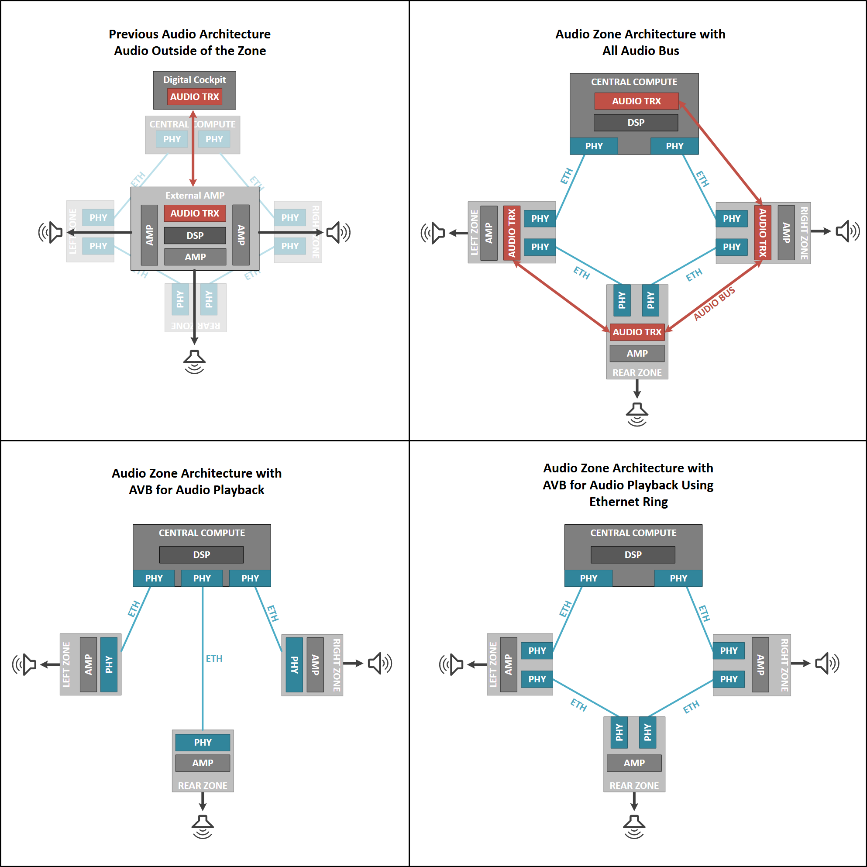
图 8 四种潜在的音频播放解决方案
图 8 中的第一个示例展示了独立于车辆架构的传统音频总线网络。所有的声音采集数据都通过数字音频总线传输;CCU 或数字座舱 ECU 负责处理娱乐系统音频数据,而外部放大器模块则负责数字信号处理及扬声器输出。该架构的主要缺点是从外部放大器模块到扬声器的布线较长。
图 8 中的第二个图演示了在区域架构下使用独立音频总线的音频实施。声音采集数据仍通过数字音频总线传输至 CCU 进行数字信号处理。随后,音频播放数据从 CCU 通过数字音频总线传输到 ZCM,再由 ZCM 放大并输出到扬声器。这种方法由于音频放大器位置靠近扬声器,缩短了扬声器布线长度;但同时,音频总线变得更加复杂。
图 8 中的第三个图和第四个图展示了 AVB 音频播放实施。数字信号处理仍在 CCU 中进行,但音频播放数据通过以太网传输。这种方法既适用于星形拓扑,也适用于环形拓扑;其中,环形拓扑为音频数据提供了额外的冗余保障。此方法同时简化了音频总线设计,并保持扬声器布线较短。
在 ZCM 中实施 AVB
通常情况下,以太网网络包括 MCU、以太网交换机和以太网 PHY,且这些元件之间通常需要一定程度的集成。这些元件通过以下方式实现媒体时钟同步 (图 9):
• 以太网 MAC。
• 以太网 PHY。
• IEEE802.1AS (gPTP)。
• IEEE1722 媒体时钟恢复。
• 媒体时钟生成。
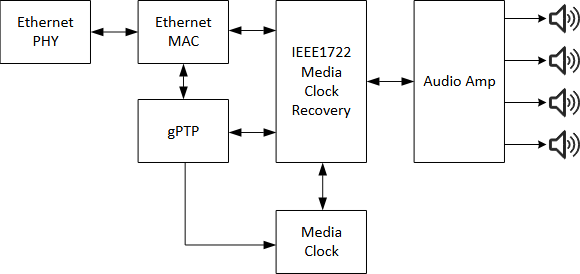
图 9 媒体时钟同步解决方案示意图
以太网 PHY 负责传输和接收以太网数据包。以太网 MAC 通过封装和解封数据包来管理数据传输。gPTP 协议可在所有网络器件间同步本地时钟,以保持一致的时间基值。IEEE 1722 媒体时钟恢复使用以太网数据包中的嵌入式时序信息来调整音频媒体时钟:一种是称为帧同步 (FSYNC) 的音频采样时钟,而另一种是音频数据串行器比特时钟 (SCLK)。
图 10 展示了 AVB 实施的可能元件图。
 图 10 在 MCU、以太网交换机和以太网 PHY 中实施媒体时钟同步
图 10 在 MCU、以太网交换机和以太网 PHY 中实施媒体时钟同步
TI 采用 DP83TG721-Q1,其集成了媒体时钟恢复功能,可根据输入的以太网流重新同步本地媒体时钟。该 PHY 在硬件层面生成音频采样率的媒体时钟 (FSYNC) 以及音频数据串行器比特时钟 (SCLK)。PHY 硬件还负责管理音频数据包的呈现时间。AM263P4-Q1 MCU 通过其可编程实时单元模拟 I2S 音频数据,从而与 TAS6754-Q1 音频放大器进行通信。图 11 展示了此解决方案。
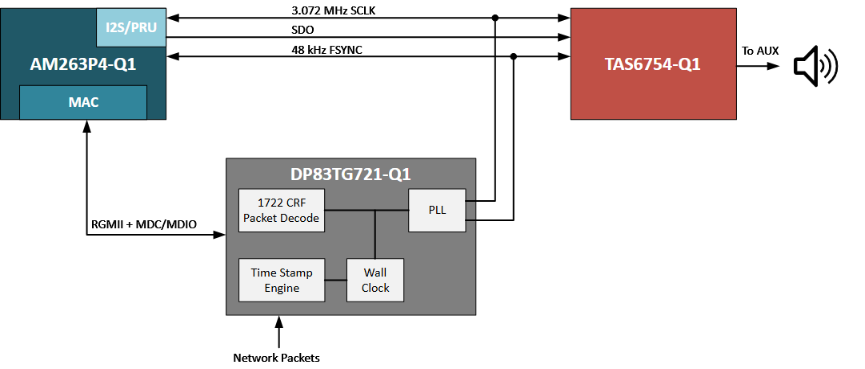
图 11 使用 AM263P4-Q1、DP83TG721-Q1 和 TAS6754-Q1 的 TI AVB 解决方案
表 3 列出了适用于以太网环形架构和 AVB 的协议。
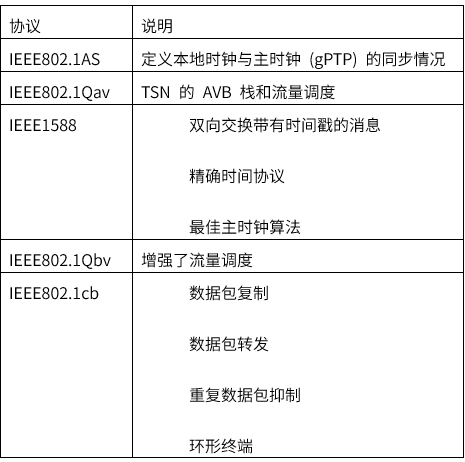
表 3 适用于以太网环形架构和 AVB 的协议列表
结语
随着汽车制造商向集中式架构迁移,可靠、高效且可扩展的网络架构变得愈发重要。通过实施以太网环形架构,可在 ZCM 与 CCU 之间提供冗余数据流,从而提升车载网络的可靠性。此外,TSN 支持将各种数据流(包括通过 AVB 传输的音频)集成到以太网主干上,从而优化网络布线成本。
关于德州仪器
德州仪器(TI)(纳斯达克股票代码:TXN)是一家全球性的半导体公司,从事设计、制造和销售模拟和嵌入式处理芯片,用于工业、汽车、个人电子产品、企业系统和通信设备等市场。我们致力于通过半导体技术让电子产品更经济实用,让世界更美好。如今,每一代创新都建立在上一代创新的基础上,使我们的技术变得更可靠、更经济、更节能,从而实现半导体在电子产品领域的广泛应用。
德州仪器
龚淑娟
李峥
相关推荐
-

-

采埃孚与卡尔动力达成战略合作,共建中国货运自动驾驶新生态
11月25日,专注于商用车自动驾驶解决方案的创新企业卡尔动力科技有限公司(以下简称“卡尔动力”)联合全球领先的商用车技术供应商采埃孚商用车解决方案事业部(以下简称“采埃孚”)在鄂尔多斯举办“2025未来运输产业峰会”,与来自商用车制造商、货运场景方、投资方、政府及学术机构的各界代表,交流智能驾驶货运产业创新和未来发展路径,探讨覆盖全运输形态、全产业链协同的商业合作模式。
2025-12-01
-



热点文章
-

-

智能网联汽车轨迹优化方法研究综述
2026-07-07
-

看见·增程的“第二生长曲线”
2026-07-14
-

中国企业出海中的人才战略与文化融合
2026-07-07
-

面向ISO 34505的自动驾驶场景评价及测试优先级分析
2026-07-13
-

浅谈智能座舱与人机交互技术创新
2026-07-14
-

连接器如何破局?莫仕携“系统级决绝方案”迈入新阶段
2026-07-08
-
浅谈智能座舱与人机交互技术创新
在汽车电动化、智能化、网联化深度融合的产业趋势下,智能座舱已从配置竞争转向技术体系与落地能力的竞争。本文以零跑汽车为案例,从中央集成电子电气架构、高算力硬件、自研车机操作系统、多模态交互、舱驾融合以及车载大模型六大技术维度,对智能座舱与人机交互关键技术进行深入解析,并聚焦底层技术实现、工程化落地、量产应用效果与成本控制逻辑。研究表明,零跑汽车实现了高阶智能技术的大众化,为自主品牌提供了可复制的实践路径,验证了技术落地成效,并指明了未来优化方向。
作者:
-
看见·增程的“第二生长曲线”
-
面向ISO 34505的自动驾驶场景评价及测试优先级分析
-
国产化替代正当时:永铭车规级固液混合电容,为激光雷达发射端与算力核心提供高纹波耐受解决方案
-
智能网联汽车轨迹优化方法研究综述
-
AI《汽车制造业》增刊





评论
加载更多