电动机温度对整车平顺性的影响
与传统内燃机汽车相比,电动汽车具有传动链短、传动效率高及整车质量分布自由度大等优点。近年来,随着国际油价的逐渐攀升,电动汽车作为一种替代传统汽车的有效交通工具,相关领域的研究越来越受到重视。驱动电动机作为纯电动汽车的惟一驱动源,其重要性不言而喻。因此对驱动电动机及其控制系统技术的研究已成为电动汽车技术研究的热点。在《电动车用永磁同步电机的转矩阶次特征分析》中,马琮淦、左曙光等人提出了电磁转矩的解析计算的方法,解释了同步电动机振动的根源。在《增程式电动汽车驱动电机及其温度特性研究》中,张鑫鑫计算了电动机各项损耗,获得了电动机温升对输出转矩和电动机效率的影响规律。目前,研究影响电动汽车平顺性因素主要集中在车辆悬架、轮胎和座椅等车辆本身部件,研究人员更多的是考虑运用控制理论匹配各参数,调整车辆结构,更好地吸收道路激励,来改善平顺性,而考虑电动机对车辆激励研究较为少见。但电动机驱动的转矩振荡对整车的噪声和纵向振动的影响也十分显著,本文主要研究驱动电动机温度的变化对整车平顺性产生的影响。
驱动电动机模型
感应电动机由于其自身的巨大优势,成为了电动汽车主要的驱动源。同时,矢量控制算法由于其卓越的控制性能和较高的成熟度,亦成为了驱动电动机控制系统的首选。本文研究的驱动电动机选用了交流感应驱动电动机,控制算法采用了矢量控制。
交流电动机的矢量控制是将三相交流绕组电流(iA、iB、iC)和两相绕组电流(id、iq)以及在旋转坐标上的两相交流绕组直流电流(im、it)建立一种等效关系,产生类似的旋转磁场F(合成电流is相等),用类似直流电动机的控制规律来控制交流电动机,其解耦结构如图1所示。
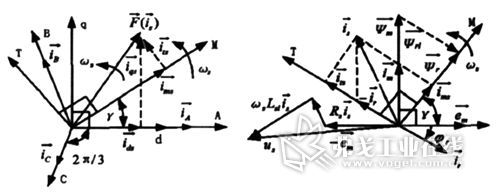
图1 矢量控制电动机旋转磁场
从图1可以看出,转子磁链φr是转子漏磁链φrl和气隙磁链φm的矢量和,M轴与转子磁链矢量φr的方向一致,且M、T轴以同步角速度ws旋转,定向后的定子电流能够分解为:

转子磁场定向后感应电动机的电压方程:
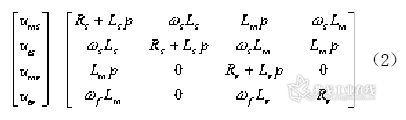
其中φmr,是转子M轴磁链;φtr是转子T轴磁链;Lm为M-T坐标系上定转子绕组间的互感;ums、uts分别为定子M轴、T轴的电压;umr、utr分别为转子M轴、T轴的电压;Rs、Ls分别为M轴、T轴上定子绕组的电阻和自感;Rr、Lr分别为M轴、T轴上转子绕组的电阻和自感;P为微分算子;wf为转差角频率。
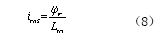
由式(1)得:

从式(7)不难发现,和为一阶惯性传递函数。即当励磁分量发生突变时,转子磁链会受到励磁惯性的阻挠影响。只有当转子磁链为稳态时,因此
温度变化对电动机性能的影响
在感应电动机中磁场定向是矢量控制中的关键问题,只有准确地检测或计算出转子磁通的位置,才能将定子电流矢量通过Clark和park变换到沿转子磁场定向的MT坐标上,从而实现对转子磁通的矢量控制。上述矢量控制变化的理论都是在转子电感与转子电阻不变的情况下推导出的,但在现实环境下感应电动机转子电阻受环境的影响比较大。
设转子电阻原始电阻值为Rr,受温度变化的影响,其阻值发生了改变,变化后的电阻值为R*r,则
因为电动机的转速控制采用闭环方式,能够保证转速的精确度,其滑差频率ws≠ws*,所以磁场的方向角θ≠θ*。图2为理想转子磁场与实际转子磁场偏离情况示意图,M轴是准确定向时磁场转子方向,M´轴是实际磁场转子方向。当τr≠τr*时,M´轴与M轴偏离一定的角度,二者相差了δ1角度。此时在M´-T´上的投影分量iM和iT,它们与理想情况下M-T坐标轴上的投影分量iM*和iT*不一致。也就是说,指令iM*和iT*不能精确控制转子磁通和转矩,解耦关系遭到破坏,导致转子磁场定向不准确,同时可能造成电动机性能变差,效率降低,损耗增加。
动态时有下列关系:
式中:Δφm和Δφt是欠阻尼衰减振荡响应的二阶状态变量,当转子的时间常数发生偏差时,Δφm和Δφt需要经历一段时间后才能够稳定下来,这期间必然会发生电磁转矩的振荡。此外,
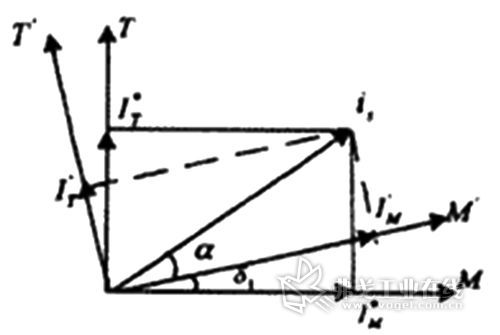
图2 实际转子磁场偏离示意图
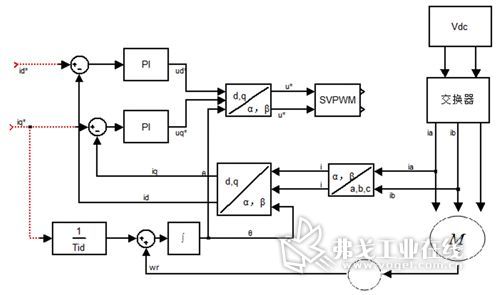
图3 转子磁场定向矢量控制器结构框图
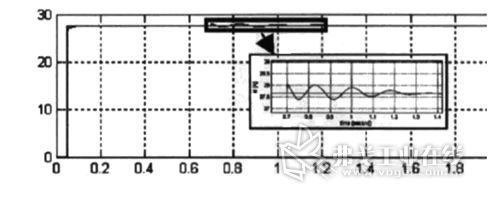
图4 励磁电流分量(im)与时间的关系
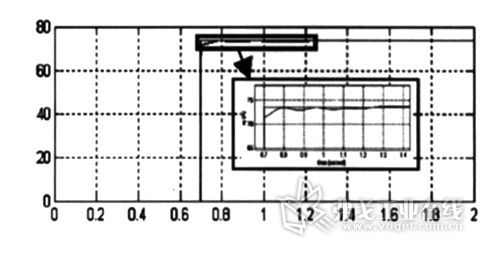
图5 转矩电流分量(iT)与时间的关系
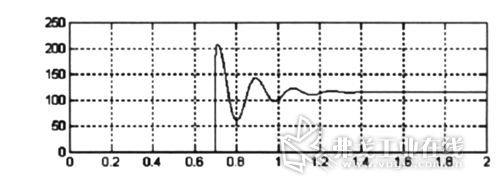
图6 电磁转矩特性
并在Matlab下进行了系统仿真。
利用所建立的驱动电动机模型进行励磁电流分量、转矩电流分量、电磁转矩等参数的仿真计算,结果如图4~6所示。
从图4~6中能够看出,由于电动机温度的变化使得在动态过程中电动机的励磁电流分量和转矩电流分量之间耦合,从而导致电动机实际电磁转矩的振荡。而且,在稳态情况下,电动机的转矩电流分量不再正确反映电动机的电磁转矩。
整车平顺性
汽车平顺性一般使用冲击度a作为评价指标。冲击度的产生是由于车辆加速度的变化而导致的,而车辆加速度变化的原因,则在于行驶驱动力的变化,因此,冲击度的大小与驱动转矩变化率成正比。分析电动汽车平顺性需要建立电动汽车的整车动力学模型,图7所示为电动汽车整车动力学模型。
根据经典力学理论,电动汽车整车加速度为:
现假设整车的负载力矩为恒定,则整车的动力性能仅决定于整车的驱动系统的性能。对于纯电动汽车来说,电动汽车的动力
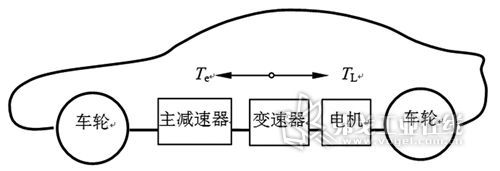
图7 电动汽车整车动力学模型
性能则完全取决于驱动电动机的性能。
结合上述公式可得,驱动电动机温度升高对电动汽车的纵向速度产生了一定的冲击,影响了电动汽车的平顺性。
结语
由于驱动电动机温度的变化,使得驱动电动机的转子时间常数发生了变化,驱动电动机的电流励磁分量与转矩分量的不能有效解耦,导致电动机输出转矩中存在较大的脉动分量,仿真结果验证了矢量控制系统结构感应电动机电磁转矩的振荡特性。电动机温度变化率增大,会增大电动汽车的冲击度,降低电动汽车运行的平顺性。
沈阳建筑大学交通与机械工程学院
龚淑娟
李峥
热点文章
-

智能汽车场景化开发:系统融合与 用户体验的协同研究
2026-07-20
-

“泰钽”来了!开启智能越野3.0时代
2026-07-22
-

基于传动效率的多模复合功率分流混合动力系统模式控制研究
2026-07-21
-

乘用车混合动力总成系统设计和性能仿真研究
2026-07-22
-

动力系统主导车市质变,增程器迈入系统竞争
2026-07-23
-

基于深度学习的电驱实验系统设计
2026-07-24
-

-
基于深度学习的电驱实验系统设计
针对传统永磁同步电机建模方法难以兼顾精度与实时性的问题,本文基于深度学习技术提出一种融合物理约束的永磁同步电机降阶模型,通过深度神经网络实现对电机非线性电磁特性的精细化建模。围绕所提降阶模型,搭建了电驱实验系统,并将该模型集成至电驱系统中,实现了实时硬件在环验证。在不同工况下对降阶模型和传统dq轴解析模型开展实验分析,结果表明,所提出的基于深度学习的永磁同步电机降阶模型在保证高精度建模的同时,实现了更好的动态性能。该模型支撑的实验系统可用于电驱系统的快速仿真与控制算法研究,具有良好的工程应用前景。
作者:
-
动力系统主导车市质变,增程器迈入系统竞争
-
“泰钽”来了!开启智能越野3.0时代
-
乘用车混合动力总成系统设计和性能仿真研究
-
基于传动效率的多模复合功率分流混合动力系统模式控制研究
-
智能汽车场景化开发:系统融合与 用户体验的协同研究





评论
加载更多