特斯拉放弃纯视觉而采用的4D毫米波雷达 你了解吗?
随着新能源汽车市场占有率的逐步提升与智能驾驶、自动驾驶等技术的发展,感知问题的重要性已经进一步凸显出来。此前,作为自动驾驶赛道的“领头羊”特斯拉也宣布,下一阶段将为量产硬件系统加入4D毫米波雷达,这一消息无疑是宣告特斯拉将放弃长久以来的纯视觉感知路线,转而投向更加多元融合的感知方案。行业的目光,也再次聚焦到4D毫米波雷达上。

4D毫米波雷达是一种高级别的无线电探测技术,利用毫米波频段的电磁波探测目标物体。与传统的二维雷达不同,4D毫米波雷达还可以提供第三维数据(距离、速度和高度),并且可以提供目标物体的动态信息(如运动轨迹和加速度等),因此被称为“4D”雷达。

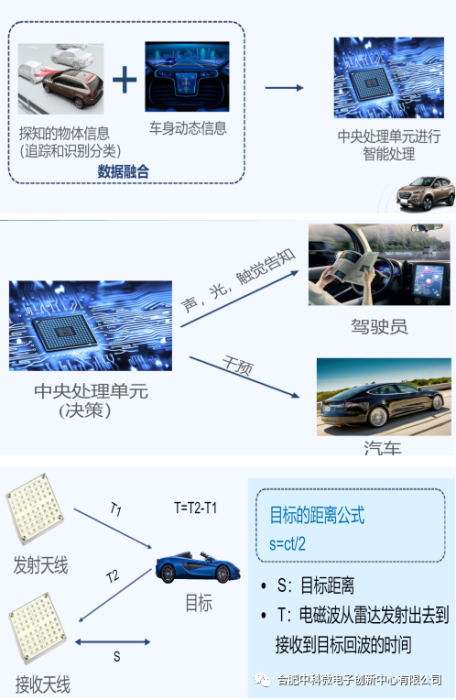
毫米波雷达的工作原理可以简单地分为发射和接收两个过程。在发射过程中,雷达系统通过发射天线向目标发送高频的毫米波信号。这些信号经过天空或者地面的反射后,再次到达雷达系统。在接收过程中,雷达系统的接收天线接收到反射回来的信号,并将其转化为电信号。
在接收到毫米波信号后,雷达系统利用信号处理技术对信号进行处理和分析。首先,通过测量信号的回波时间,可以计算出目标物体与雷达系统之间的距离。这是基于信号的往返时间和光速之间的关系来实现的。
通过分析信号的频率变化,可以计算出目标物体相对于雷达系统的速度。这是基于多普勒效应的原理,即当目标物体相对于雷达系统运动时,其反射回来的信号会发生频率偏移。
4D毫米波雷达还可以通过分析信号的相位变化来计算目标物体的角度信息。当信号发生反射时,其相位会发生变化,通过测量相位变化的大小和方向,可以确定目标物体的角度。通过将距离、速度和角度信息进行综合分析,4D毫米波雷达可以实时地生成目标物体的三维图像。这些图像可以用来识别和跟踪目标,提供更加精确和全面的信息。
调频式连续波技术是毫米波雷达的主要技术路线。该技术的优势在于测量距离远、精度高、在性能相同的条件下成本更低;不同探测距离的雷达上车搭载位置不同。一般前向雷达为LRR类型,搭载量1-2颗,角雷达以及座舱内雷达为SRR或MRR类型;不同工作频率毫米波雷达性能不同。毫米波雷达主要工作频率为24GHz、60GHz、77GHz、79GHz,低频率雷达成本较低、高频率雷达性能更佳。
77-79GHz毫米波雷达将成为车载主流类型。77GHz收发天线长度与阵列间隔均为24GHz的1/3,体积约为1/9,产品体积较小且识别精度更高。政策层面看, 24GHz频段2022年起已在欧洲、美国停止使用,我国工业和信息化部已在《汽车雷达无线电管理暂行规定》中明确汽车雷达使用频率为76-79GHz。

4D毫米波雷达的优势:1)环境适应性强,几乎能在任何条件下工作,甚至是雾、暴雨、夜晚及空气污染等各种天气和环境条件下,也能提供高可靠性的探测。2)可实现对目标物垂直高度的测定,弥补现有毫米波雷达的缺点。3)水平和垂直视场角和分辨率变大,点云密度的覆盖范围已超越了绝大多数车载激光雷达。4)一定程度上可实现非视距感知,能够“看穿”墙壁、紧闭的门和其他固体物体,可探测到被前车挡住的前前车位置和速度。5)与摄像头进行数据融合的难度比激光雷达低,验证成本较低。
热点文章
-

智能汽车场景化开发:系统融合与 用户体验的协同研究
2026-07-20
-

“泰钽”来了!开启智能越野3.0时代
2026-07-22
-

基于传动效率的多模复合功率分流混合动力系统模式控制研究
2026-07-21
-

乘用车混合动力总成系统设计和性能仿真研究
2026-07-22
-

动力系统主导车市质变,增程器迈入系统竞争
2026-07-23
-

基于深度学习的电驱实验系统设计
2026-07-24
-

-
基于深度学习的电驱实验系统设计
针对传统永磁同步电机建模方法难以兼顾精度与实时性的问题,本文基于深度学习技术提出一种融合物理约束的永磁同步电机降阶模型,通过深度神经网络实现对电机非线性电磁特性的精细化建模。围绕所提降阶模型,搭建了电驱实验系统,并将该模型集成至电驱系统中,实现了实时硬件在环验证。在不同工况下对降阶模型和传统dq轴解析模型开展实验分析,结果表明,所提出的基于深度学习的永磁同步电机降阶模型在保证高精度建模的同时,实现了更好的动态性能。该模型支撑的实验系统可用于电驱系统的快速仿真与控制算法研究,具有良好的工程应用前景。
作者:
-
动力系统主导车市质变,增程器迈入系统竞争
-
“泰钽”来了!开启智能越野3.0时代
-
乘用车混合动力总成系统设计和性能仿真研究
-
基于传动效率的多模复合功率分流混合动力系统模式控制研究
-
智能汽车场景化开发:系统融合与 用户体验的协同研究





评论
加载更多