浅析自主代客泊车关键技术与趋势
随着超声波雷达以及图像采集等技术的逐渐成熟,使得自动泊车技术得以进一步发展完善。同时随着技术研发的不断深入,成本也会大大降低。自动泊车技术的应用,使汽车更加智能化。
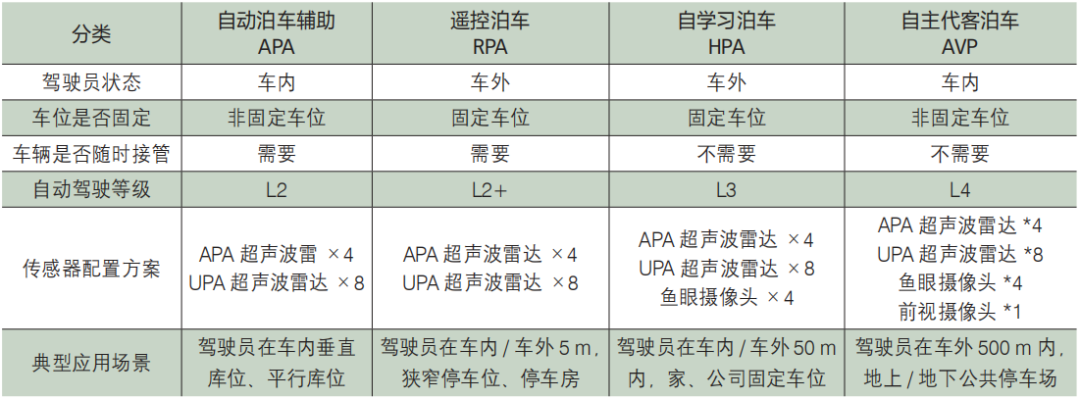
泊车系统分类自动泊车系统简称“APA”,搭载有自动泊车功能的汽车可以不需要人工干预,通过车载传感器、处理器和控制系统的帮助就可以实现自动识别车位,并自动完成泊车入位的过程。自动泊车系统主要是利用遍布车辆自身和周边环境里的传感器,测量车辆自身与周边物体之间的相对距离、速度和角度,然后通过车载计算平台或云计算平台计算出操作流程,并控制车辆的转向和加减速,以实现自动泊入、泊出及部分行驶功能。根据人是否下车及车与车位的关系,将泊车系统分为自动泊车辅助(APA)、遥控泊车(RPA)、自学习泊车(HPA)和自主代客泊车(AVP)。自主代客泊车系统(Automated Valet Parking,AVP)实现的是全自动代客泊车功能,最终目标是取代传统的人工代客泊车。
泊车系统分类
AVP涉及的细分场景复杂,技术难度大。从AVP的功能流程来看,典型的AVP功能流程包括:车机互联、车辆在停车场内寻找车位、车辆自动泊入车位和远程召唤车辆。AVP通过用户发出指令、泊车入位、召唤指令和远程召唤四项关键子功能实现全自动代客泊车,帮助用户节省停车时间,解决高峰期排队停车的痛点。车机互联,是AVP功能的基础,车位寻找是AVP功能的核心。泊入车位功能与传统的自动泊车功能一样、通过规划泊入路径并控制车辆按路径倒车,完成泊入车位的工作,车辆召唤功能是车辆自动泊车的相反过程。

AVP 功能流程与功能拆解
AVP关键技术支撑
从AVP的基本原理可以看出,AVP功能的实现,涉及车联网、感知识别、同步定位及规划控制等多个领域,其中涉及的关键技术有高精地图、同步定位与建图技术(SLAM)、融合感知、融合定位、路径规划等。多种技术支撑AVP功能实现,但相关关键技术如路径规划,仍有赖于自动驾驶算法的发展,需要持续优化、迭代。

AVP 关键技术
1. AVP技术路线功能分类
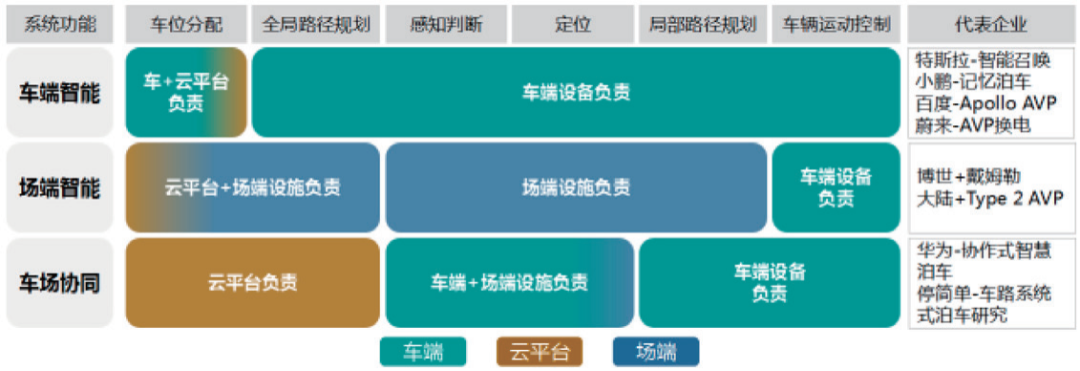
依据寻找车位的方案,AVP技术路线主要分为车端智能、场端智能与车场协同,体现车或场的主体变化。车端智能主要依靠车辆完成大多数泊车操作,而场端更关注车场设施功能。主机厂OEM企业重点发力车端智能,一级供应商与科技企业更关注场端设施的改造。
AVP 技术路线
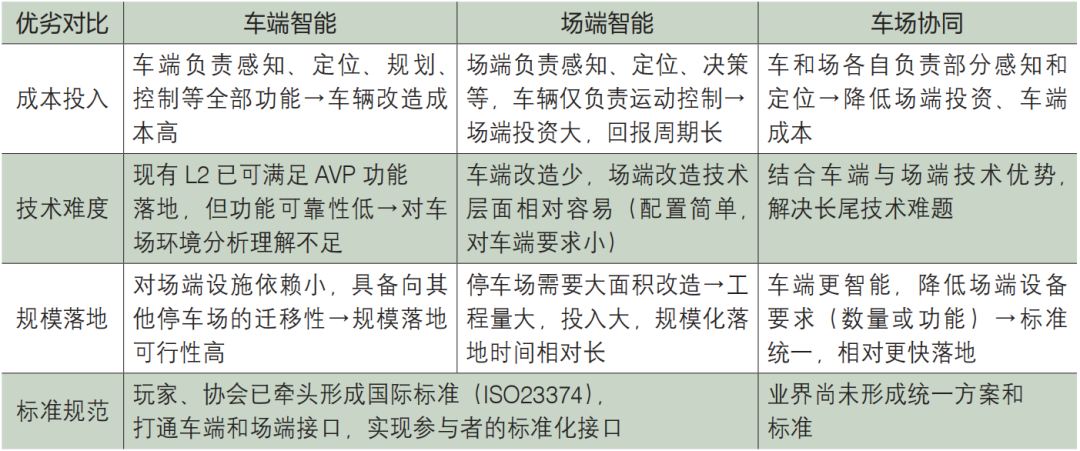
车端派与场端派(纯场派+车场协同)优劣势各不相同,车端方案发展较早且布局厂家众多,但依然存在技术与成本问题,而场端方案则面临规模化投入巨大的挑战,综合考虑车场协同是目前最易落地的模式。
AVP 技术路线综合对比分析
2. AVP车端技术路线分析
车端技术路线主要借助于车载传感器对周围环境以及自身状态的感知来决策并执行车辆动作,并在必要时提醒用户进行车内或远程接管操控。单车智能实现AVP功能主要取决于车辆技术能力,车辆的自动驾驶水平决定了AVP单车智能技术路径的可靠性。现阶段车辆配置已基本满足AVP功能,但仍存在车对场环境分析与理解的问题。

车端技术路线
3. AVP场端技术路线分析
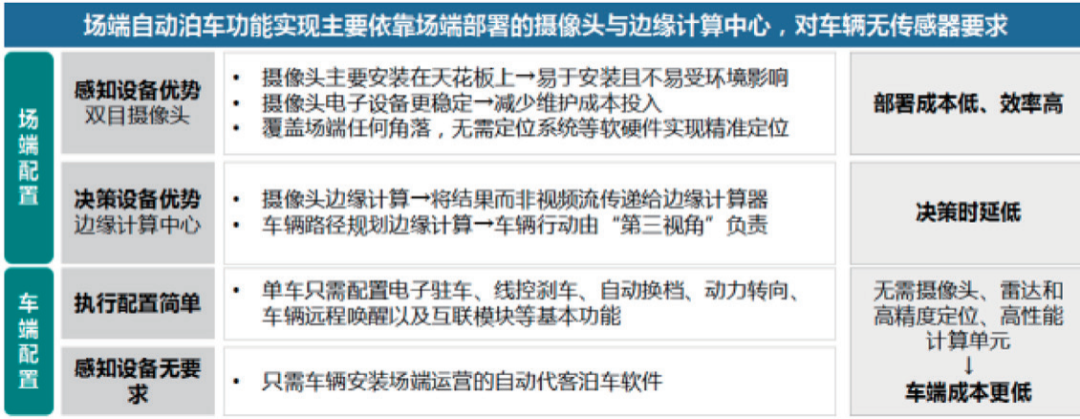
场端技术路线即在停车场内布置激光雷达或双目摄像头来实现对车辆状态及周边环境的监控,通过预埋式停车场传感器探测当前占用状态。所有传感器数据在数据中心进行汇总分析,根据储存的元信息(如停车位尺寸、费用、诸如残疾人停车位等的特殊情况等)完成匹配。数据中心根据这所有的信息实时生成停车地图,驾驶员通过智能手机APP接收了解可用停车位信息以及所有相关详情,车辆只需要具备与停车场设施的通信能力和可控的底盘执行系统,即可在场端的辅助下完成自主泊车。
场端技术路线
相比于车端复杂的多重传感器融合方案,场端因无须应对复杂多变的行车环境,对车辆配置及场端改造的技术要求低,单个车场改造成本也低。场端方案通过降低对车辆及车场配置的要求,实现快速规模化落地。
4. AVP技术路线发展趋势
车端与场端都存在缺点,场端技术路线对停车场要求较高,工程量大,投入大,规模化落地时间相对长;车端技术路线对车辆功能可靠性要求较高,当前对车场环境分析理解不足,未来AVP技术发展路线将以车端和场端融合为主。

AVP 技术路线发展趋势
AVP商业化挑战
AVP作为自动驾驶新产品,其保险和责任认定尚未形成统一标准,应以用户服务体验为中心,与商业化落地息息相关。AVP保险由产品开发/运营方负责,具体形式尚未有成熟体系。事故责任认定是否合理与用户购买意愿高度相关。安全、效益和装配率是决定停车场能否接受AVP改造的主要因素,而用户买单更关注能否享受真无人化的服务体验。停车场意愿取决于AVP能否有效赋能其业务,而用户习惯需要逐步教育与培养。
AI汽车制造业
龚淑娟
李峥
热点文章
-

-

智能网联汽车轨迹优化方法研究综述
2026-07-07
-

看见·增程的“第二生长曲线”
2026-07-14
-

中国企业出海中的人才战略与文化融合
2026-07-07
-

面向ISO 34505的自动驾驶场景评价及测试优先级分析
2026-07-13
-

浅谈智能座舱与人机交互技术创新
2026-07-14
-

连接器如何破局?莫仕携“系统级决绝方案”迈入新阶段
2026-07-08
-
浅谈智能座舱与人机交互技术创新
在汽车电动化、智能化、网联化深度融合的产业趋势下,智能座舱已从配置竞争转向技术体系与落地能力的竞争。本文以零跑汽车为案例,从中央集成电子电气架构、高算力硬件、自研车机操作系统、多模态交互、舱驾融合以及车载大模型六大技术维度,对智能座舱与人机交互关键技术进行深入解析,并聚焦底层技术实现、工程化落地、量产应用效果与成本控制逻辑。研究表明,零跑汽车实现了高阶智能技术的大众化,为自主品牌提供了可复制的实践路径,验证了技术落地成效,并指明了未来优化方向。
作者:
-
看见·增程的“第二生长曲线”
-
面向ISO 34505的自动驾驶场景评价及测试优先级分析
-
国产化替代正当时:永铭车规级固液混合电容,为激光雷达发射端与算力核心提供高纹波耐受解决方案
-
智能网联汽车轨迹优化方法研究综述
-
AI《汽车制造业》增刊





评论
加载更多