座驾系统的驾驶舒适性优化提升方案
0 前言
现有商用车驾驶座椅最多具有八向调节,且大多数为机械手动调节,少许豪华车型配备电动调整按钮,都需根据驾驶人主观感受,单项依次调节,往往适可而止,大多数都无法将驾驶座椅调至最为匹配个人的位置,从而导致驾驶人人体各关节处于非舒适姿态,长时间驾驶车辆行驶,人体易产生疲劳,舒适度极低,轻则对人体健康产生危害,重则容易疲劳驾驶,引发车祸灾难。为此,本文研究能根据不同驾驶人体态,自调整座椅状态,从而匹配迎合驾驶人最佳驾驶坐姿,提高商用车驾驶舒适性的智能座驾系统。
1 驾驶舒适性提升优化方案
1.1 驾驶人体建模
1.1.1 人体扫描
本文采取摄像头系统扫描驾驶人绘制数字人体虚拟模型,如图1所示,扫描摄像头分布在主驾车门外侧及驾驶室内部四角上,当驾驶人人打开车门瞬间,启动探测扫描设备,通过摄像头及雷达检测驾驶人上车过程及入座过程中的各个关节的长短以及活动肢体粗细等形态信息,如图2、图3所示,将探测数据上传至智能座舱域控制器。
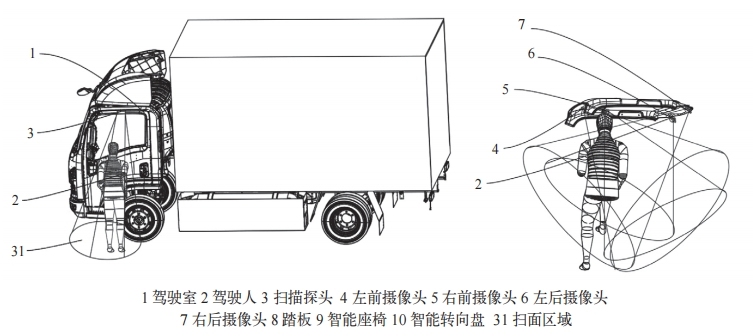
图1 摄像头系统扫描摄像头分布
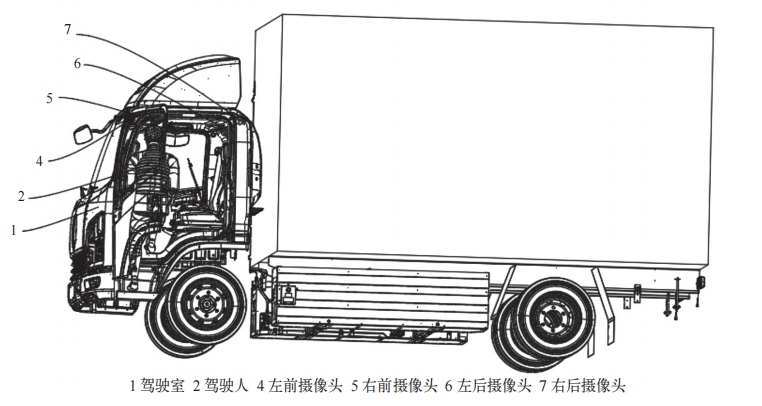
图2 摄像头及雷达检测驾驶人上车过程
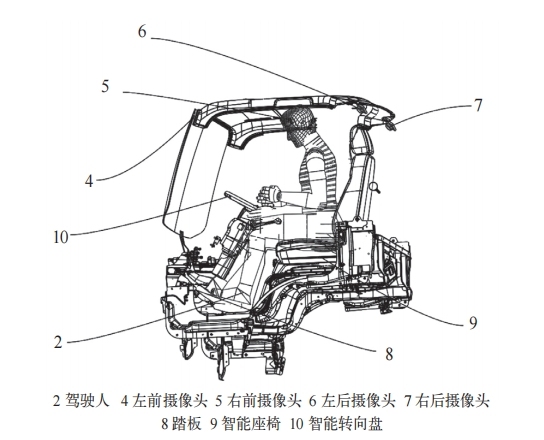
图3 驾驶人入座状态
智能座舱域控制器将摄像头及激光雷达探测上传的信息做初步处理,如图4所示。基于该组数据绘制与当前驾驶人人体吻合的虚拟人体模型,如图5所示,同步探测车辆当前自适应转向盘、自适应座椅的位置状态信息。
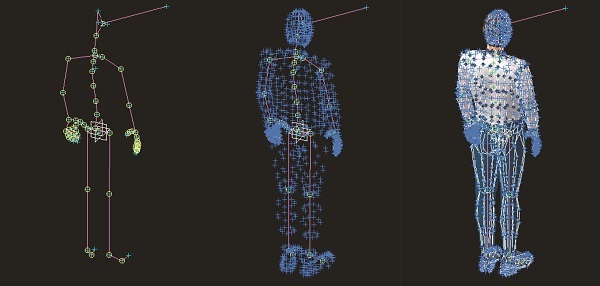
图4 识别定义当前人体各关节长度、体态胖瘦
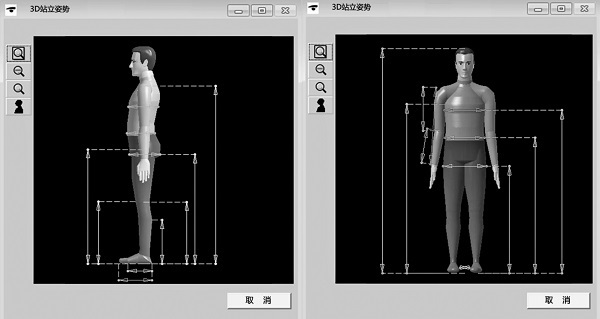
图5 生成当前驾驶人模型及人体百分位
1.1.2 人体坐姿优化
智能座舱域控制器将生成的当前驾驶人虚拟模型及探测到的当前自适应转向盘、自适应座椅的位置状态信息结合控制器原有的踏板位置信息,以座椅参考点(SGRP)点、踵点(AHP)和转向盘中心点(SWC)等主要信息,结合中国成年人人体尺寸及人体百分位最佳驾驶坐姿等进行大数据库人机分析,生成出最为适合该驾驶人在当前驾乘环境下的驾驶坐姿,进而根据当前的人体匹配最佳坐姿确定调整差值,并将差值信息解析为使能信号,驱动智能座椅、智能转向盘调整至最佳舒适姿态,同步在智能中控屏上显示最佳坐姿,并语音提醒驾驶人按照中控屏上显示图像调整坐姿,如图6所示。调整过程,摄像头系统时刻监控驾驶人体,直至调整到系统默认的最佳姿态。
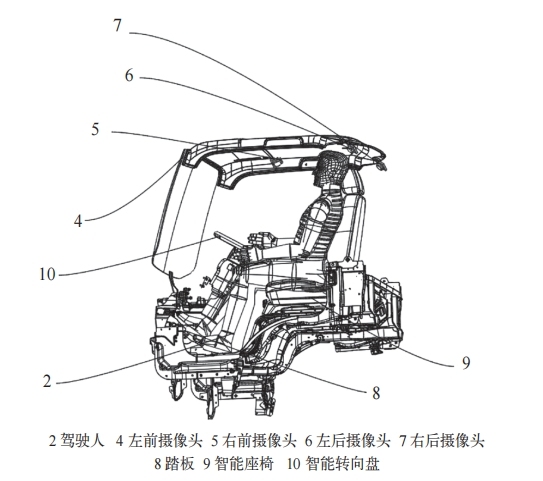
图6 智能座椅、智能方向盘调整至最佳舒适姿态
1.2 自适应转向盘及自适应座椅调整
通过智能座舱域控制器解析出当前的人体匹配最佳坐姿确定调整差值,并将差值信息解析为使能信号,驱动智能座椅、智能转向盘调整至最佳舒适姿态。
自适应座椅模块包括:座椅上下调整机构、座椅前后调整机构、座椅左右调整机构、座宽包覆调整机构、座椅旋转调整机构、座椅腰托调整机构、座椅腰围包覆调整机构、座椅脊椎托靠调整机构、座椅肩托调整机构以及座椅头枕调整机构。座椅模块各执行机构执行前进、后退、升降、收覆、包裹和旋转动作,达到控制器目标位置。即通过上述机构实现座椅的多向调节,进而将主驾座椅调至最佳匹配该驾驶人舒适的位置,并且座宽、靠背宽可自动调整,包覆支撑驾驶人生理体验至最佳舒适状态。
自适应转向盘如图7所示,转向盘模块包括:前后调节机构和上下调节机构。前后调节机构通过电机带动旋转移动。上下调节机构通过电机带动齿轮齿条进行移动。自适应转向盘模块各执行机构执行伸缩旋转动作,达到控制器目标位置,进而将转向盘调至最佳匹配该驾驶人最佳手操作的位置,减少双手长时间操纵转向盘造成的疲劳,提高驾驶体验感。
1.3 驾驶舒适性提升优化原理
该方法采取摄像头系统扫描驾驶人绘制数字人体模型,智能座舱域控制器通过人体分析软件解析人体模型各关节、肌肉数据。结合车辆座椅参考点(SGRP)点、踵点(AHP)和转向盘中心点(SWC),座椅状态绘制基于该驾驶人就所在车辆驾驶系统最佳驾驶坐姿。通过控制器将最佳驾驶姿态转化为电信号,驱动智能转向盘调整机构、智能座椅多向调节机构。将主驾座椅调至最佳匹配该驾驶人的位置,同时配置驾驶人语音交互确认系统,驾驶人体验系统推荐舒适位置,通过驾驶人实际评判,对驾驶人意见做适应性完善调整,并将舒适性改善评价明显的模型,通过智能座舱域控制器记录导入驾驶人坐姿库,适当的可上传至后台云端,当该驾驶人再次驾乘同一辆车辆时,优先按之前云端存储的坐姿数据推荐调整数据。具体流程如图7所示。
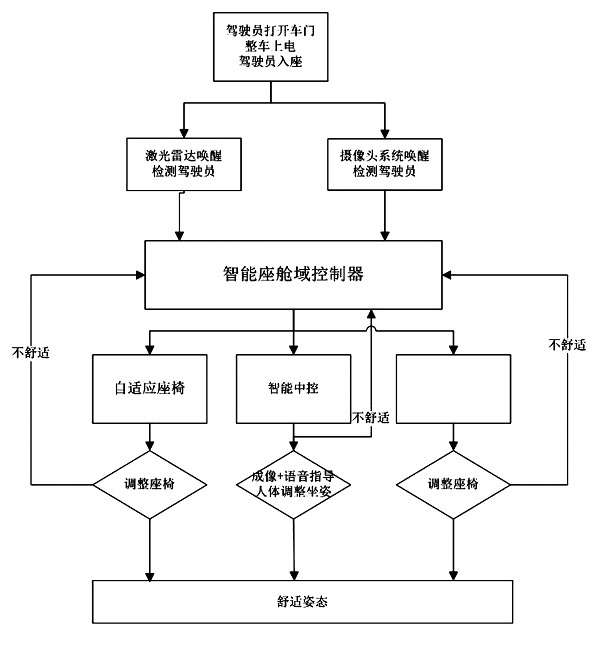
图7 驾驶舒适性提升优化原理
2 试验分析
为验证基于驾驶舒适性提升优化方法的有效性,本文试验时选择质子汽车科技有限公司开发的4.5t载货车,搭载所述方法所涉及的设备作为试验车型。根据该车型试验车辆实际采集信号数据中智能座舱域控制器对采集到的驾驶人信息与相应的输出改进情况进行详细分析,主要包括驾驶人模型的定义生成、当前坐姿的舒适性评分、推荐各部件调整值、调整后驾驶人坐姿及调整后驾驶人坐姿舒适性评分。分析数据显示,根据智能座舱域控制器分析优化调整各部件状态后,实际车辆驾驶人坐姿根据引导调整后,驾驶舒适性得到了明显得改善。原始状态为驾驶人随机入座后未经过模型分析时的坐姿及系统对身体各部件舒适性的评分如图8所示,可以看出,驾驶人随机坐姿舒适度评分并不高,车内乘人舒适性得不到保证,乘坐舒适性表显较差。长期按此坐姿驾驶,容易造成关节酸痛导致身体疲劳。(注:软件对驾驶姿态的不舒适度评分结果分成8级,级别越高,评分越高,则驾驶姿态越不舒适。若得分为0,则为最舒适。)
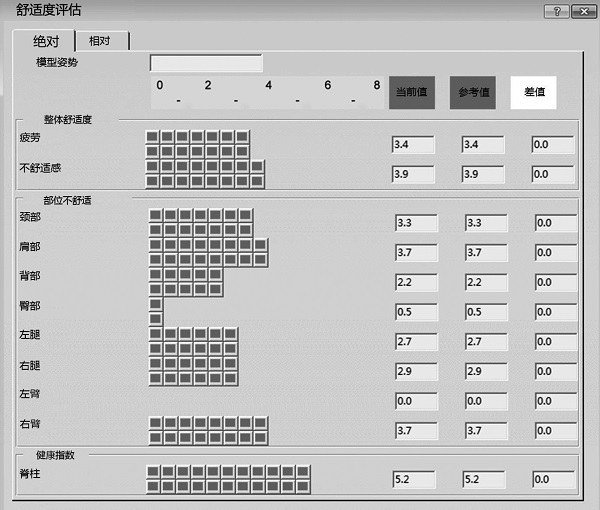
图8 智能座椅、智能转向盘整前人体舒适度评分
考虑到数据的直观性,智能座舱域控制器将生成人体信息数据及各执行机构应调整差值发送到整车CAN线上,并通过OBD与周立功CAN分析仪连接。OBD接口一般在方向盘下方,刹车踏板上方。通过OBD线与试验用CAN分析仪相连,再使用USB连接线便可以通过软件进行反馈数据的分析。在选择设备为USBCAN-2E-U后,该设备将接收来自车辆的标准帧数据,可以读取智能座舱域控制器发送的车辆当前驾驶人体及自适应调整座椅及自适应方向盘相关信息的实时数据,从而进行更深入的分析和诊断。根据对接收到的数据加以分析,可以初步判断本方法方案具有可行性。
智能座舱域控制器解析出的各部件请求目标位置与时间位置坐标的差值作为位移和旋转的使能数据,分别驱动自适应座椅与自适应方向盘各执行机构工作,同时将推荐人体坐姿通过图像的样式显示在仪表台智能中控大屏上,结合语音提醒信息引导驾驶人调整自身坐姿及肢体臂展状态。调整过程中,驾驶人体及自适应座椅、自适应转向盘数据时刻受雷达及摄像头系统监控,整个过程为闭环控制。调整结束后,通过语音信息提醒驾驶人对调整后的坐姿是否满意,当驾驶人评价感受不佳时,语音交互体感不足的部位,智能座舱域控制器调整相应部件。对驾驶人意见做适应性完善调整,并将舒适性改善评价明显的模型,通过智能座舱域控制器记录导入驾驶人坐姿库,适当的可上传至后台云端,当该驾驶人再次驾乘同一辆车辆时,优先按之前云端存储的坐姿数据推荐调整数据。
图9为智能座椅、智能转向盘调整后人体舒适度评分,通过图8和图9的对比发现通过智能座舱域控制器解析调整后,实际肢体各部件评分度总体稳定,无突出不适应点,驾乘感受更为舒适。
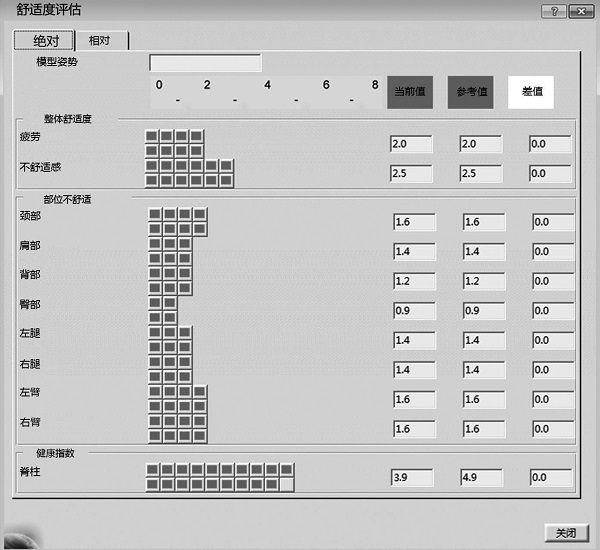
图9 智能座椅、智能方向盘调整后人体舒适度评分
3 结语
本文对一种驾驶人机工程舒适性设计优化方案行了阐述,该方法采取摄像头系统扫描驾驶人绘制数字人体模型,智能座舱域控制器通过人体分析软件解析人体模型各关节、肌肉数据,并结合车辆驾驶区踏板踏点、方向盘中心点,座椅状态绘制基于该驾驶人就所在车辆系统最佳驾驶坐姿。通过控制器将最佳驾驶姿态转化为电信号,驱动智能转向盘调整机构、智能座椅多向调节机构,将主驾座椅调至最佳匹配该驾驶人的位置。同时配置驾驶人语音交互确认系统,驾驶人体验系统推荐舒适位置,通过驾驶人实际评判,对驾驶人意见做适应性完善调整,并将舒适性改善评价明显的模型,通过智能座舱域控制器记录导入驾驶人坐姿库,适当的可上传至后台云端,当该驾驶人再次驾乘同一辆车辆时,优先按之前云端存储的坐姿数据推荐调整数据。该套智能调节的驾驶识别系统及控制方法,配置智能可靠、结构布置合理紧凑,能有效提高驾驶人驾驶舒适性,具有较强的实用性和较好的应用前景,为城道路运输车架驾驶舒适性优化设计提供参考。
参考文献
[1] 房立勇,辛磊,赵久永,等.人机工程在城市客车设计中的应用[J].汽车文摘,2022(9):58-62.
[2] 国家标准化管理委人会.中国成年人人体尺寸:GB/T10000-2023.北京:中国标准出版社,2023:2-8.
[3] SAE.MotorVehicleDimensions:SAEJ1100NOV2009[S].SAEInternational,2009:11.
[4] 全国汽车标准化技术委人会(SAC/TC114).汽车驾驶人前方视野要求及测量方法:GB11562-2014[S].北京:中国标准出版社,2014:2-8.
[5]赵龙.基于RAMSIS仿真的驾驶人人机工程校核方法研究[D].中国客车学术论文,2020.
本文为“AI汽车制造业”首发,未经授权不得转载。版权所有,转载请联系小编授权(VOGEL100)。本文作者:赵龙 董立明 张淼 杨凯帆 高文成 熊玉杰 武盼祥 邓成刚 徐嘉乐,单位:质子汽车科技有限公司 。责任编辑龚淑娟,责任校对何发。本文转载请注明来源:AI汽车制造业
AI汽车制造业
龚淑娟
李峥
相关推荐
-

2024年十大快充电池技术大揭秘
近两年,快充电池成为了动力电池企业的开发重点,快充电池新品层出不穷。尤其是在今年,各大电池企业纷纷升级快充技术、发布新品,并加紧推进量产应用,有一种你方唱罢我登场的火热态势,推动快动电池进入技术突破与量产的关键期。
2024-12-25
-

-

新能源汽车需要用到什么芯片?
汽车芯片就像人类的大脑,按功能可以分为计算、感知、执行、通信、存储与能源供应五大类。再细分点,可以分为控制芯片、计算芯片、传感芯片、通信芯片、存储芯片、安全芯片、功率芯片、驱动芯片、电源管理芯片九大类。
2024-12-24



热点文章
-

-

智能网联汽车轨迹优化方法研究综述
2026-07-07
-

看见·增程的“第二生长曲线”
2026-07-14
-

中国企业出海中的人才战略与文化融合
2026-07-07
-

面向ISO 34505的自动驾驶场景评价及测试优先级分析
2026-07-13
-

浅谈智能座舱与人机交互技术创新
2026-07-14
-

连接器如何破局?莫仕携“系统级决绝方案”迈入新阶段
2026-07-08
-
浅谈智能座舱与人机交互技术创新
在汽车电动化、智能化、网联化深度融合的产业趋势下,智能座舱已从配置竞争转向技术体系与落地能力的竞争。本文以零跑汽车为案例,从中央集成电子电气架构、高算力硬件、自研车机操作系统、多模态交互、舱驾融合以及车载大模型六大技术维度,对智能座舱与人机交互关键技术进行深入解析,并聚焦底层技术实现、工程化落地、量产应用效果与成本控制逻辑。研究表明,零跑汽车实现了高阶智能技术的大众化,为自主品牌提供了可复制的实践路径,验证了技术落地成效,并指明了未来优化方向。
作者:
-
看见·增程的“第二生长曲线”
-
面向ISO 34505的自动驾驶场景评价及测试优先级分析
-
国产化替代正当时:永铭车规级固液混合电容,为激光雷达发射端与算力核心提供高纹波耐受解决方案
-
智能网联汽车轨迹优化方法研究综述
-
AI《汽车制造业》增刊





评论
加载更多