智能汽车线控底盘域控技术分析
随着新能源汽车智能驾驶技术的快速发展,对汽车底盘的技术要求也越来越高,为实现高阶的智能驾驶,对制动的反应时间,转向的精度、悬架的可变适应性等都提出了较高的要求。也因此,制动、转向线控制成为高级别自动驾驶汽车执行端的基石。线控底盘取消大量的机械连接装置及液压和气压等辅助装置,具备制动响应速度快,转向控制精度高等特点,同时,在制动能量回收效率上更高,能有效提升续航能力,并具备多重冗余机制,安全性能有保障,结构更加精简、轻量化程度更高,可磨损部件减少维护成本降低。为了实现这么多优点,底盘域控制器成为智能化汽车的又一深度集成化解决方案。
线控底盘技术可划分为五大模块,包括线控制动、线控转向、线控驱动、线控悬架和线控换挡。这些模块各自承担不同的控制任务,共同支撑车辆的稳定运行和自动驾驶系统的高效执行,而这些模块的指挥大脑就是底盘域控制器。底盘域控制器通过对底盘悬架、制动、转向等各部件传感器进行信号融合,精确量化行驶过程中车辆安全稳定运行的边界条件,进行驾驶员意图识别及底盘多目标多系统综合优化,实现底盘多系统协同控制,从而实现车辆动力学集成控制,解决各个执行机构耦合冲突的问题。也就是说,底盘域控制器集成制动、转向、驱动、悬架等X、Y、Z三向的控制功能,从而实现一体化控制。
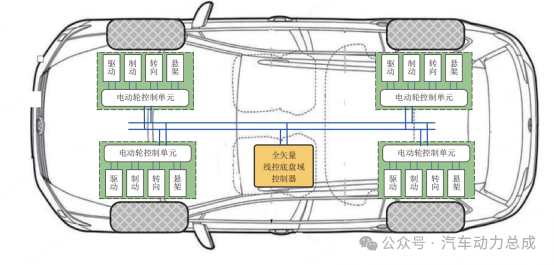
从产品维度上讲,智能底盘域控制器实现了“多合一”集成,常见的底盘域控制器集成功能包含了制动系统管理、转向系统管理、行驶系统管理、传动系统管理、悬架系统管理以及车身姿态传感器管理等。制动系统管理有线控制动EHB、EMB、EPB等控制器,转向系统管理有线控转向SBW控制器,行驶系统管理有AWD控制器,悬架系统管理有ECAS、CDC 等控制器,车身姿态传感器管理有ESC、VMC等控制器。
底盘域控制器在系统、软硬件设计上要具备通信冗余、电源冗余、感知冗余、主控制器冗余等设计,且遵循功能安全和信息安全的设计流程,具备在故障模式下的降级或安全接管能力,保证底盘的承载与行驶功能安全可靠。底盘域控制器功能安全需满足最高等级ASIL-D,对控制器整体要求较高。底盘域控制器要对多个传感设备数据进行分析,实现预瞄控制,需要应用强化学习控制算法,基于大量的数据来调整和优化模型参数,使算法的准确度达到预期,其核心在于算力。底盘X/Y/Z 协同控制算法需要基于多源异构传感器,开发底盘传感器信息融合校验专用算法,以准确判断出驾驶员意图、路面坡度、附着系数、轮胎各向力以及车辆质心侧偏角等关键状态信息。同时,要具备强大的硬件计算能力和丰富的软件接口,可以实现软硬件解耦以及功能与硬件解耦,有利于支持OTA升级,从而实现核心算法的快速迭代和优化。这些功能共同控制车辆的行驶行为和行驶姿态,确保车辆在不同工况下的稳定性和安全性。
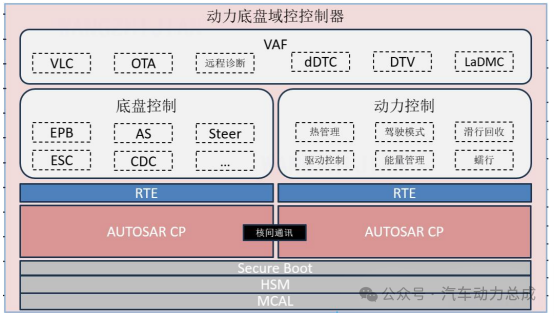
可拓展软件平台
底盘域控制器需要提供通用的计算和通信资源,以及标准化的软件创新平台,支持不同的功能域以及应用。底盘集成运动域控制器需要遵循汽车行业的软件标准,如 AutoSAR,以实现软硬件解耦和软件重用。AutoSAR 是一种分层的软件架构,包括基础软件层(BSW)、运行时环境层(RTE)和应用层(ASW)。AutoSAR 适配和定制是底层软件开发的重要环节,需要根据不同的硬件平台、功能需求和安全等级等进行配置、修改和优化。底盘集成运动域控制器涉及车辆的动态性能、安全性和智能化水平,要求软件具有高度的稳定性和可靠性。软件测试和验证是底层软件开发的必要环节,需要进行严格的仿真、实车及场景等测试,保证软件满足功能、性能和安全等要求。底盘域集中控制器采用软硬件分离的平台化思想,实现可灵活更新的软件定义底盘。
线控制动控制
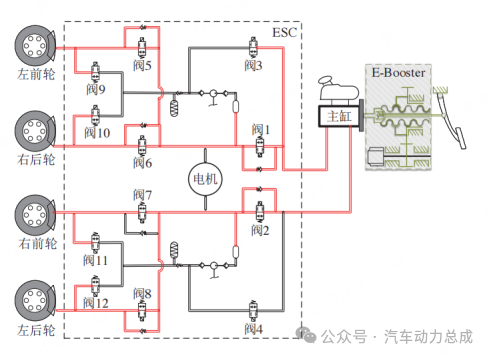
线控制动对于智能汽车意义非凡。在电动汽车领域,它有效解决了真空助力缺失的难题,并且能完美实现能量回收,大幅提升能源利用效率。从性能上看,线控制动极大缩短了制动响应时间,传统制动系统响应时间大约在300 - 500毫秒,而线控制动系统可将这一时间缩短至100毫秒以内,为行车安全提供了更快速的保障。目前主流的电子液压制动系统(EHB)中,One Box方案以其成本低、集成度高的优势备受关注,如大陆集团的MK C1系列产品已在多款车型上实现应用 。不过,更具前瞻性的电子机械制动(EMB)系统虽有着诸多优势,如结构更紧凑、响应更迅速,但由于技术复杂、可靠性仍需提升等问题,暂时未能大规模量产。
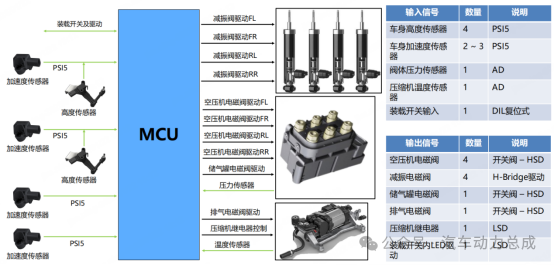
线控悬架控制
线控悬架可依据路况、驾驶模式自动调节弹簧刚度、车身高度以及减震器阻尼。在高速行驶时,降低车身高度以减少风阻、提升稳定性;在颠簸路况下,增加悬架行程和阻尼以提高舒适性。但目前线控悬架由于重量较大、成本高昂以及可靠性方面的考量,主要应用于中高端C级和D级车型,限制了其更广泛的普及。
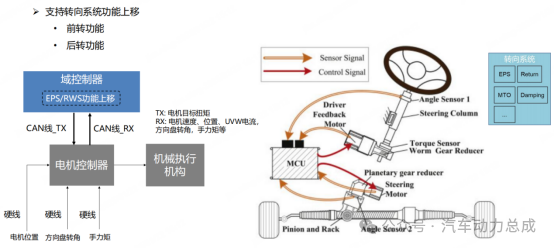
线控转向控制
线控转向技术革命性地去除了方向盘与转向轮之间的机械连接,完全依靠电子信号传递转向指令。这一变革使得转向操控更加灵活精准,转向比可根据车速、驾驶模式等因素实时调整,在低速行驶时提供更小的转弯半径,高速行驶时保障行驶稳定性。在自动驾驶场景下,线控转向更是不可或缺,能精准执行自动驾驶系统发出的转向指令。但该技术面临着诸多挑战,比如如何精准模拟真实路感反馈给驾驶员,以及确保系统在各种复杂工况下的安全性和可靠性。
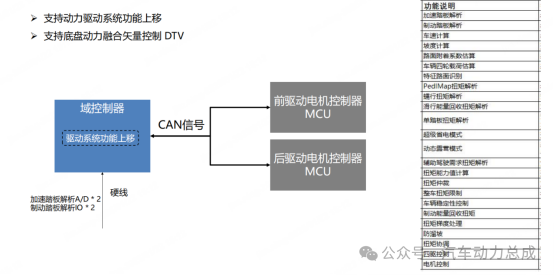
驱动系统控制
在线控驱动领域,传统内燃机汽车广泛应用了线控油门技术,实现了对发动机动力输出的精准控制。而新能源汽车的线控驱动正处于从集中电机驱动向分布式驱动的发展阶段。以轮边电机和轮毂电机为代表的分布式驱动系统,赋予车辆更灵活的动力分配方式,可实现原地掉头、蟹行等特殊行驶模式。然而,分布式驱动面临着电机布局空间有限、散热困难以及对车辆底盘结构设计要求高等问题。
车身动态控制VMC
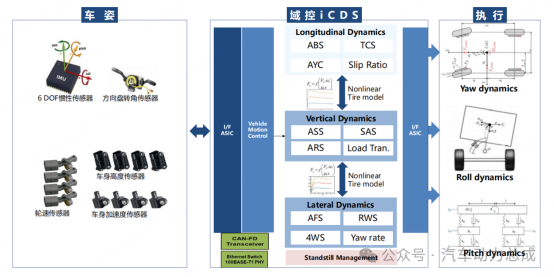
车身动态控制VMC,Vehicle Motion Control, 根据车辆在行驶过程中的动态情况,采用集中的车辆控制技术,对车辆上所有可用的能影响车辆动态特性(底盘及动力)的控制系统进行优先仲裁和分配,实施集成优化控制。在有驾驶员驾驶的情况下能够实现车辆驾驶动态性能的可变操控,根据驾驶员的需要对底盘各控制系统进行优选以改变驾驶体验;在智能驾驶情况下能够通过协调控制各底盘控制体统以实现车辆对轨迹的准确跟踪;
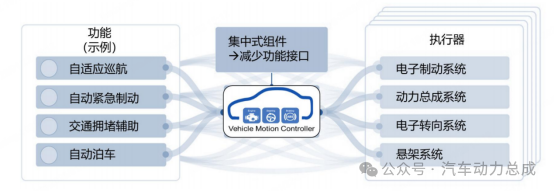
那么多系统集成底盘域控制能够解决哪些问题,同时对整车带来怎样的性能提升?一是消除子系统间冲突,提升整车综合性能。集成控制的目的就是通过控制不同系统,消除子系统间的干涉或冲突,再借助各系统功能间的互补以及垂向控制对路面附着圆的影响,尽量挖掘各子系统效能潜力,拓展车辆动力学控制边界,从而实现整车综合性能的提升。
二是优化软硬件系统结构,消除冗余算法,信息资源共享现阶段车辆中各功能软件存在部分算法重复开发、传感器信息仅供系统内部使用等问题。集成后,通过对整车控制架构的重新划分,实现整车软硬件资源优化以及信息融合复用,消除冗余算法并减少同数据源处传感器数目及线束长度。
底盘域控制器不仅能提升汽车智能化水平,而且通过一个域控制器取代多个独立的ECU控制模块,减少控制模块及对应的线束,能带来汽车底盘BOM成本的降低,并且主机厂能通个底盘域控制器产品获得底盘供应链的主导权;基于底盘域控制器带来的巨大优势,主机厂需求强烈,随着各类线控底盘执行器的逐步上车,以及高级功能的开发。总的来说,底盘域控制系统是汽车电子电器领域的一个重要发展方向,它通过集成和管理各种底盘相关的控制功能,为车辆提供了更高的安全性、舒适性和稳定性。
汽车动力总成
龚淑娟
李峥
相关推荐
-

特斯拉FSDV13,代码重写堪比SpaceX猛禽3引擎
特斯拉全自动驾驶软件FSDV13通过代码全面重写实现了系统稳定性和响应速度的提升,引入了多模态AI技术增强了系统对环境的理解能力,并在用户体验和安全性方面进行了显著优化。本文介绍了FSDV13版本发布带来的技术革新与未来展望,同时,文章也提出了全自动驾驶技术广泛推广所引发的社会伦理层面考量与反思,如责任归属、个人隐私与数据安全以及技术的公正普及等问题,亟待深入思考与广泛探讨。
2025-02-11
-

DeepSeek如何赋能自动驾驶?
DeepSeek需与传统的自动驾驶技术栈(如控制理论、SLAM、强化学习)深度融合,其核心价值在于解决开放环境下的认知智能问题,而非替代现有感知-决策-控制链路。
2025-02-11
-




热点文章
-

智能汽车场景化开发:系统融合与 用户体验的协同研究
2026-07-20
-

“泰钽”来了!开启智能越野3.0时代
2026-07-22
-

基于传动效率的多模复合功率分流混合动力系统模式控制研究
2026-07-21
-

乘用车混合动力总成系统设计和性能仿真研究
2026-07-22
-

动力系统主导车市质变,增程器迈入系统竞争
2026-07-23
-

基于深度学习的电驱实验系统设计
2026-07-24
-

-
基于深度学习的电驱实验系统设计
针对传统永磁同步电机建模方法难以兼顾精度与实时性的问题,本文基于深度学习技术提出一种融合物理约束的永磁同步电机降阶模型,通过深度神经网络实现对电机非线性电磁特性的精细化建模。围绕所提降阶模型,搭建了电驱实验系统,并将该模型集成至电驱系统中,实现了实时硬件在环验证。在不同工况下对降阶模型和传统dq轴解析模型开展实验分析,结果表明,所提出的基于深度学习的永磁同步电机降阶模型在保证高精度建模的同时,实现了更好的动态性能。该模型支撑的实验系统可用于电驱系统的快速仿真与控制算法研究,具有良好的工程应用前景。
作者:
-
动力系统主导车市质变,增程器迈入系统竞争
-
“泰钽”来了!开启智能越野3.0时代
-
乘用车混合动力总成系统设计和性能仿真研究
-
基于传动效率的多模复合功率分流混合动力系统模式控制研究
-
智能汽车场景化开发:系统融合与 用户体验的协同研究





评论
加载更多