增程式电动汽车驱动电机选型研究
0 引言
整车属性目标中,动力性指标尤为重要,它主要包括最高车速、加速能力和最大爬坡度。增程式电动汽车驱动电机的选型对于动力性指标的达成起到关键作用,其中驱动电机的最高工作转速选取和整车满电最高车速强相关,驱动电机的扭矩功率选取和整车加速能力、爬坡能力相关。增程式电动汽车的动力源主要来自于驱动电机,发动机不参与直接驱动,主要作为充电宝给电池充电。高速驱动电机配合主减速器固定齿轮速比传动实现整车加减速和倒档。
通过公式计算对众多细分动力性指标做属性分解并得出电机参数比较繁琐复杂,通过运用 MATLAB 一维仿真对驱动电机的主要参数做初步选取,如电机最高工作转速、额定转速、峰值功率、额定功率、峰值扭矩和额定扭矩等更为快捷。以下内容对变速器驱动电机承接整车动力性能指标参数匹配步骤进行示例说明,并简单介绍了增程式电动汽车电量维持阶段的能量管理策略。
1 动力性需求及仿真计算边界确定
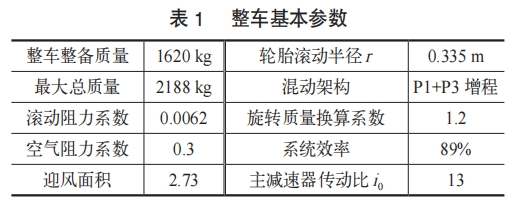
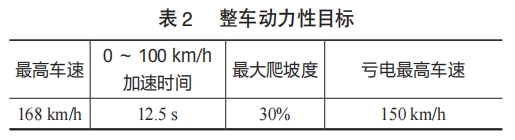
首先,增程式电动汽车的主要动力源来自于驱动电机,因此要求驱动电机具有调速性能好、控制稳定、结构简单和扭矩平稳等特点。永磁同步电机符合以上要求,受到大多数汽车公司的青睐。增程式电动汽车驱动电机选型永磁同步电机开发,需要确定的主要参数包括电机最高工作转速、峰值功率、峰值扭矩、额定转速、额定扭矩以及额定功率。表1列出了仿真计算所需整车基本参数。整车动力性设计目标如表2。
2 变速器驱动电机基本参数选型步骤
电动汽车满电最高车速和电机最高工作转速之间的关系,公式如下:
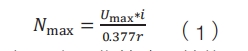 式中,Nmax为电机最高工作转速,单位是r/min;Umax为电动汽车满电最高车速,单位是km/h;i 为传动比;r 为轮胎半径,单位是m。
式中,Nmax为电机最高工作转速,单位是r/min;Umax为电动汽车满电最高车速,单位是km/h;i 为传动比;r 为轮胎半径,单位是m。
代入最高车速Umax=168 km/h,主减速比选择i=13,轮胎半径r=0.335m;计算得出驱动电机最高转速17279r/min。基于软件控制及诊断需求考虑,选择电机最高转速适当增加,初步按18000 r/min选取。
电机的最高转速与额定转速之比称为扩大恒功率区系数,一般用β来表示,公式如下:
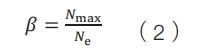 式中,β为电机扩大恒功率区系数;Ne为电机额定转速,单位是 r/min。
式中,β为电机扩大恒功率区系数;Ne为电机额定转速,单位是 r/min。
按 β =2.5 选取电机扩大恒功率区系数,计算电机额定转速为 7200r/min,因此电机最高工作转速和额定转速初选定义为 18000 r/min和7200 r/min。
基于 MATLAB 软件编写程序仿真的电机功率的选取,整车的动力性指标分解的转速扭矩要求主要由驱动电机进行承接,驱动电机功率越大,整车加速和爬坡能力越强。一般基于整车需求的最高车速确定电机额定功率。基于整车最高满电车速,加速时间以及爬坡性能各自对应的最大功率求取出最大值作为驱动电机的峰值功率。仿真图形如图 1 ~ 3。
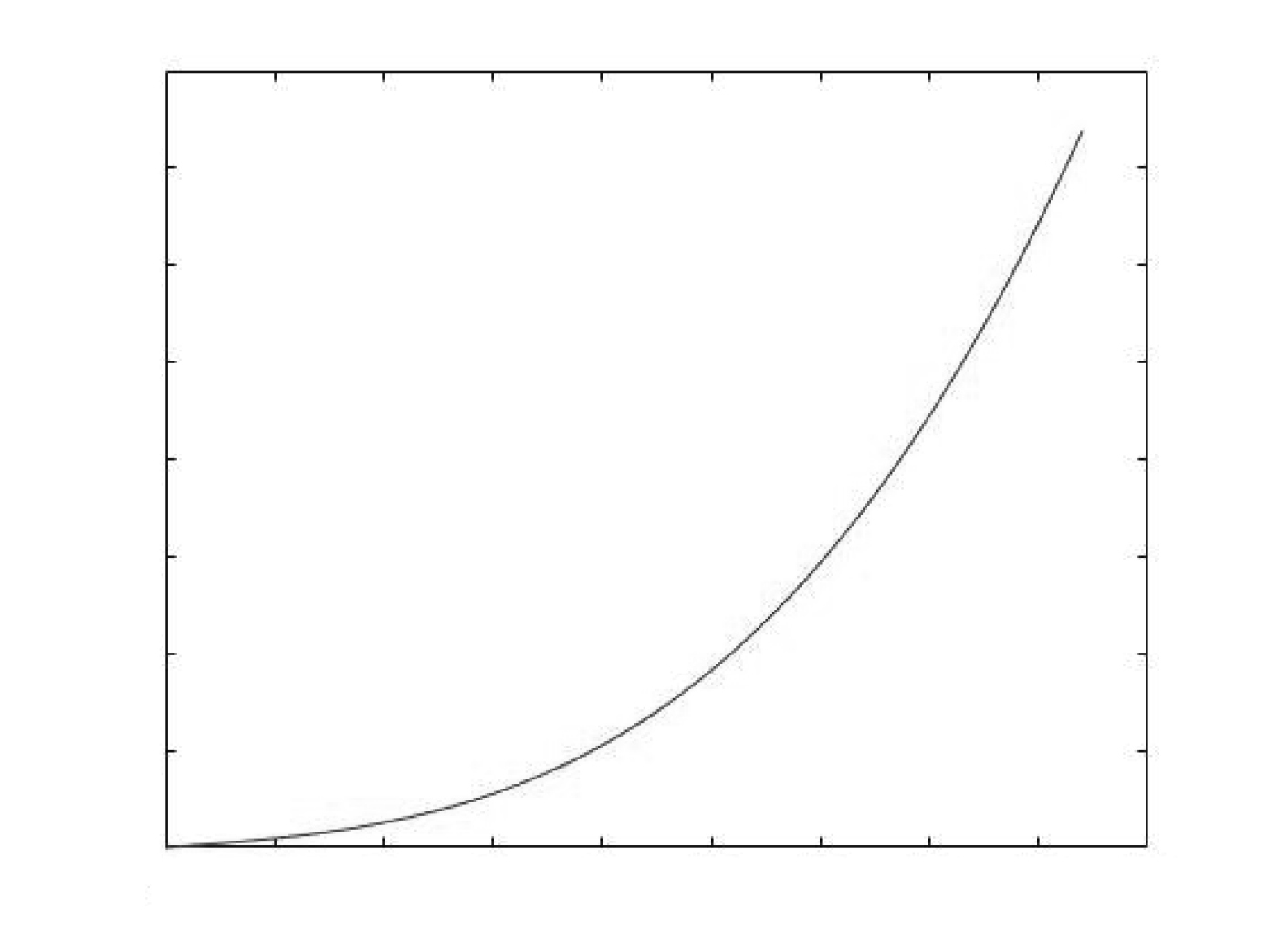
图1 最高车速和驱动电机功率对应关系
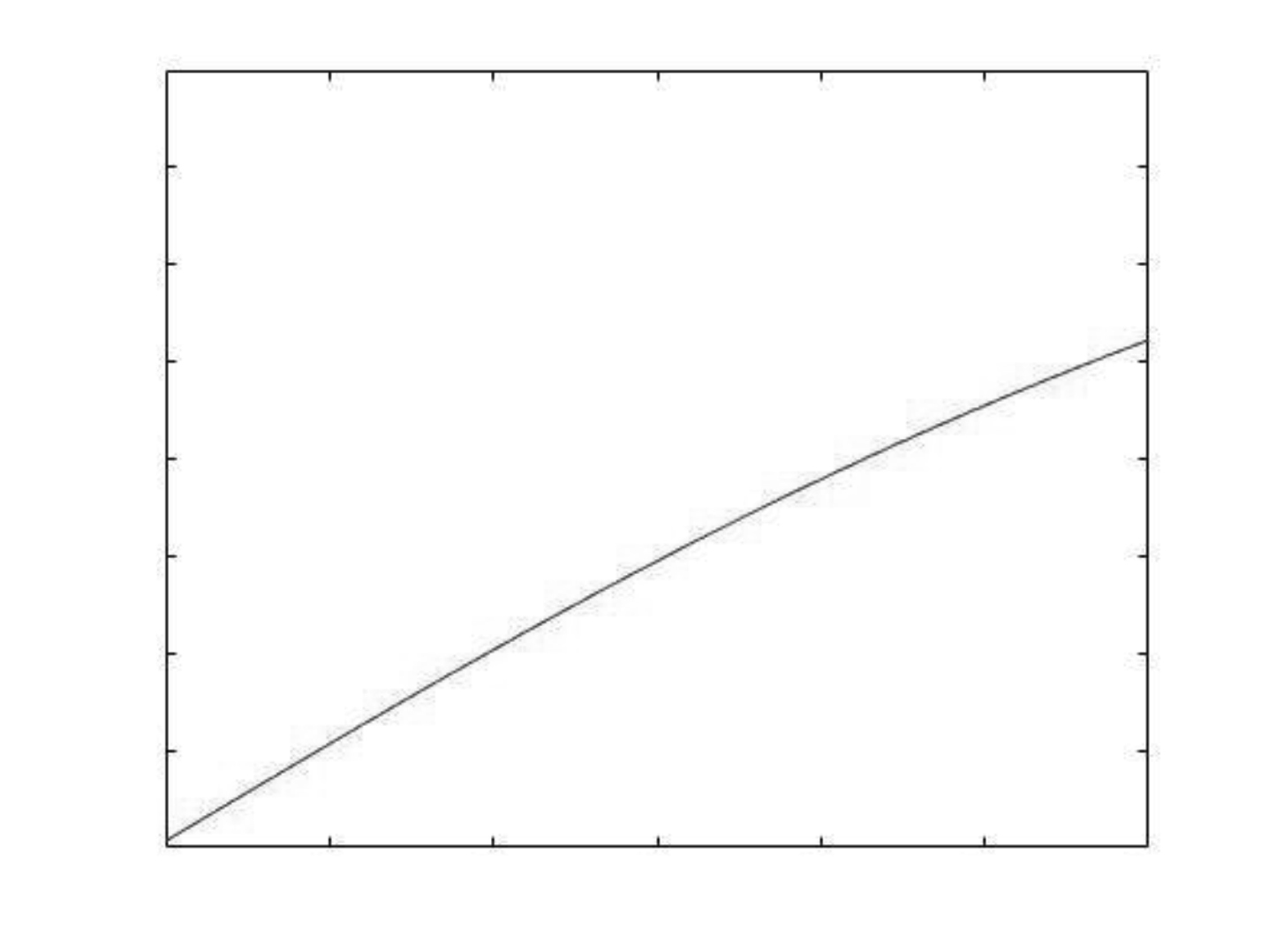
图 2 爬坡度和驱动电机功率对应关系
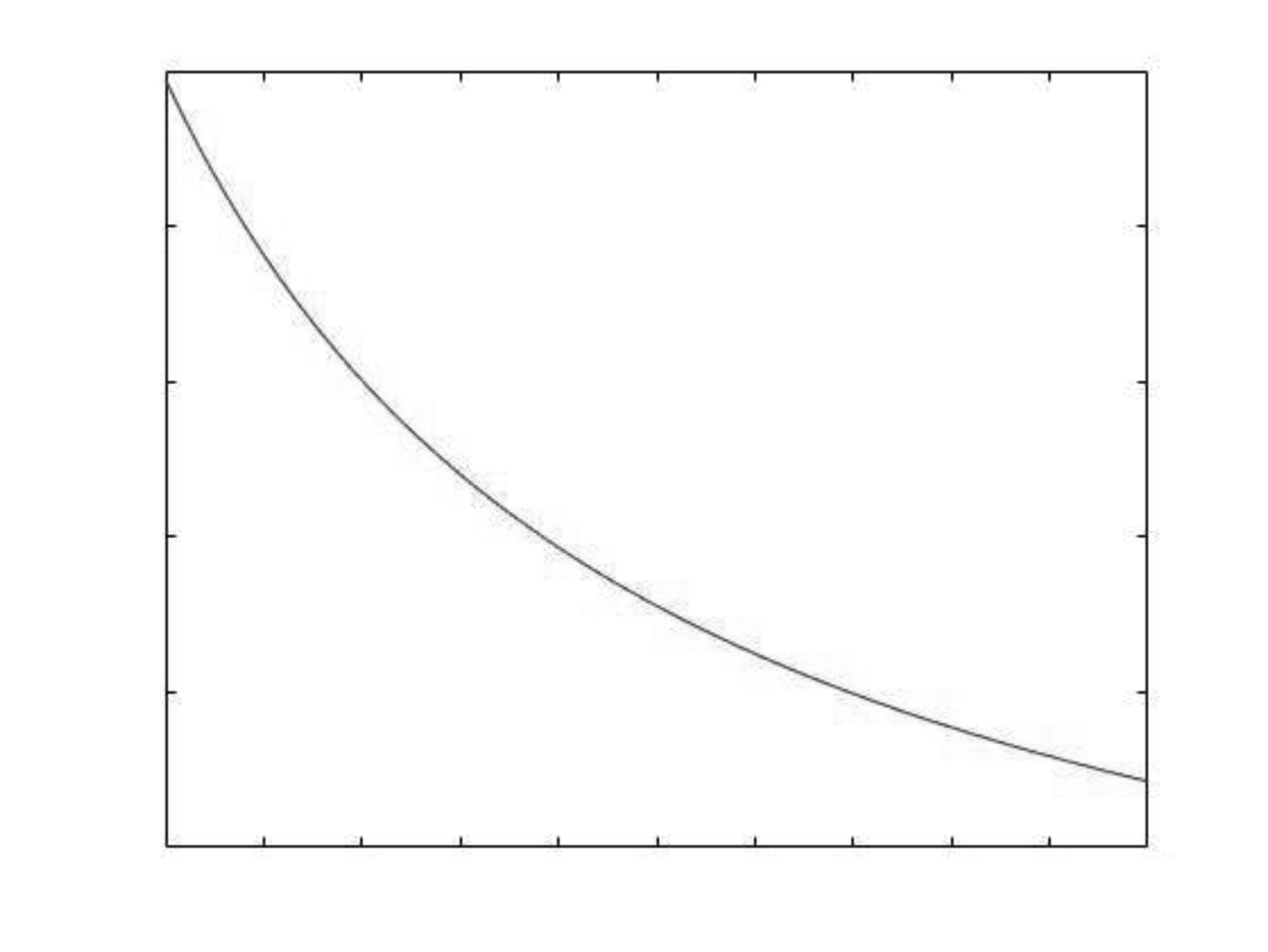
图 3 加速时间和驱动电机功率对应关系
基于仿真一维图形确定同时满足最高车速所需电机功率 Pm1=73.92 kW,满足最大爬坡度所需电机功 率 Pm2=58.72 kW,满足加速时间所需电机功率Pm3=152.93 kW。
设计考虑驱动电机额定功率按最高车速决定,同时考虑过载系数按 1.2,故额定功率选择Pe=90 kW ;峰值功率取Pmax=148.75 kW。
电机扭矩的确定基于公式:
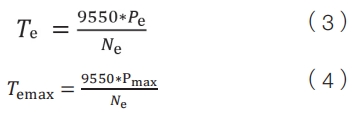
式中,Te——电机额定扭矩,单位是N·m ;Pe——电机额定功率,单位是 kW ;Ne——电机额定转速,单位是 r/min ;Temax为电机峰值扭矩,单位是 N·m ;Pmax为电机峰值功率,单位是 kW。
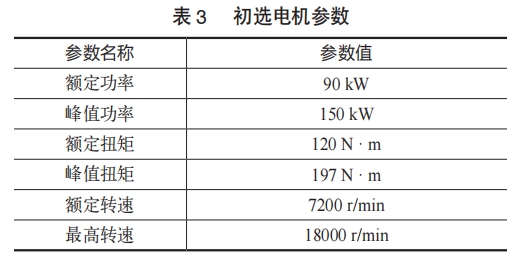
计算电机额定扭矩 Te=120 N·m,峰值扭矩Temax=197N·m。
数据的校核,使用一定车速下最大爬坡度和汽车行驶满电最高车速要求,对计算确定的电机参数进行校验,公式如下:

式中,m 为整车满载质量,单位是 kg ;g 为重力加速度,单位是 m/s² ;Temax 为电机峰值扭矩,单位是N·m ;at为系统效率;f 为滚动阻力系数;αmax 为最大爬坡度,单位是 % ;Cd 为空气阻力系数;A为迎风面积,单位是 m² ;u为汽车爬坡速度,单位是 km/h ;i0 为主减传动速比;r 为轮胎半径,单位是 m ;Nmax 为电机最高工作转速,单位是 r/min ;umax 为最高车速,单位是 r/min。
通过计算确认: 11.96 < i 0 < 13.5,满足要求。综上,电机参数初步选型匹配参数汇总如表 3。
3 增程器(发动机和发电机)参数匹配
在亏电模式下,发动机作为动力源,需要保证整车亏电动力性,需要对发动机和发电机的参数进行匹配。发动机输出功率满足条件公式如下:

式中,Pre 为发动机最大功率效率,单位是KW;at为系统效率;m 为满载质量,单位是kg,f 为滚动阻力系数;μmax为馈电最高车速,单位是 km/h;Cd为空气阻力系统;A为迎风面积,单位是m2。
基于MATLAB仿真获得满足最高亏电车速下发动机的最大功率:Pre=53.81KW。
需要考虑空调、娱乐及灯光等负载,发动机功率按1.3倍系数选取,取70kW。发电机功率Pge 按发动机满足最高亏电车速下发动机的最大功率进行匹配取整Pge=55 kW,如图4所示。
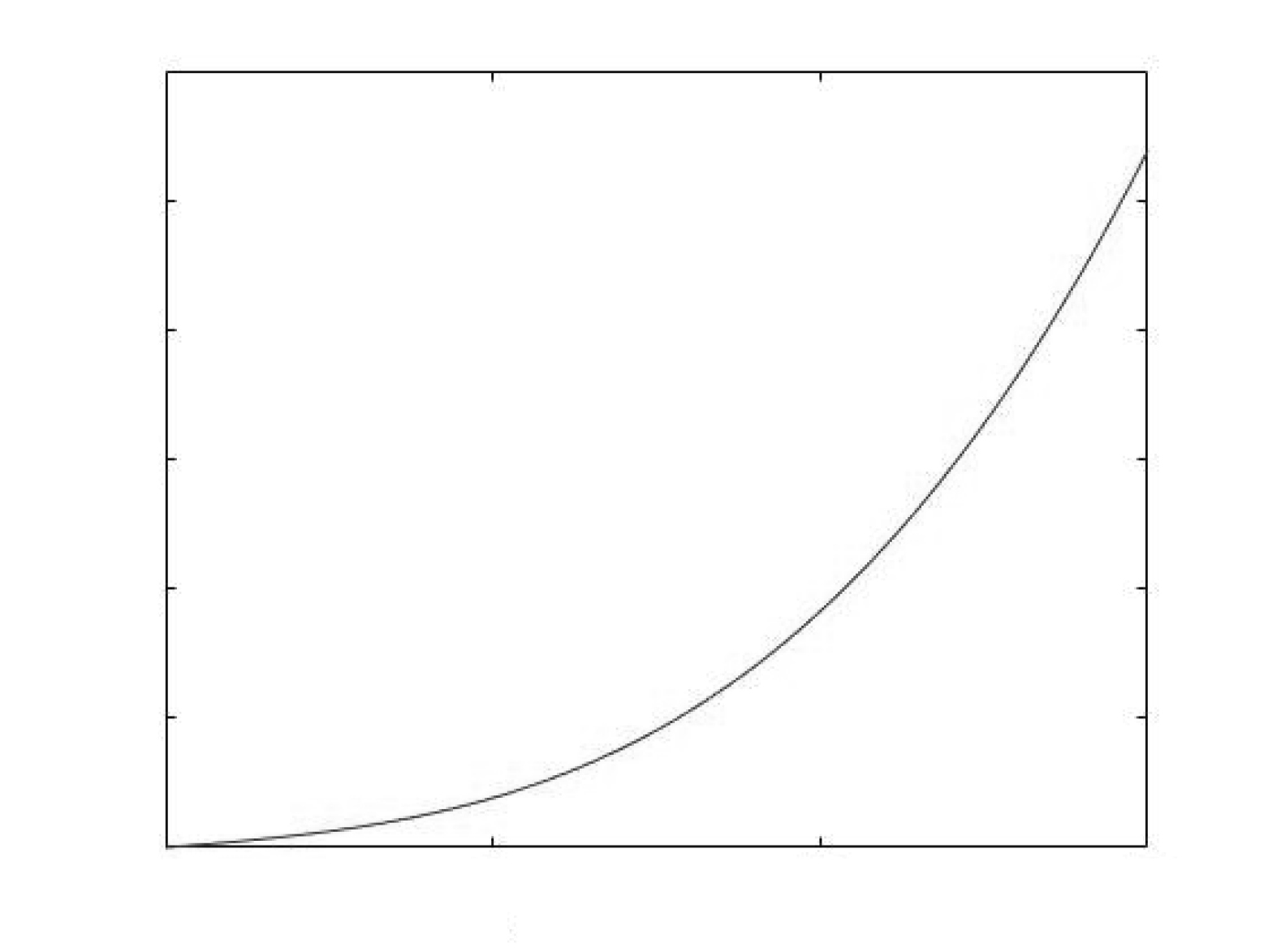
图 4 最高车速和发动机功率对应关系
4 增程式电动汽车变速器主要工作模式及串联控制策略
表4所示为增程汽车变速器主要工作模式。
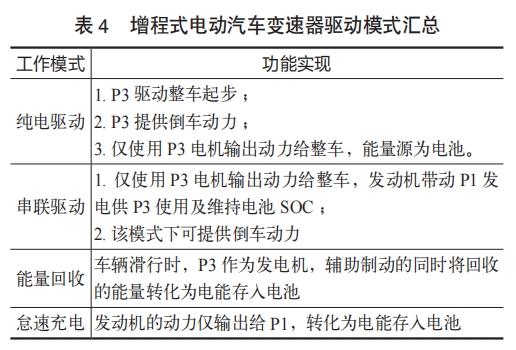
基于双电机电控增程变速器工作模式,即发动机与 P1 直连,发动机作为充电宝,只发电不参与驱动;只有 P3 与驱动车轮连接,作为主驱;动力源为发动机和整车电池;其串联模式下能量管理控制策略围绕 CS(Charging Sustain)规则展开设计,基于电池 SOC 和车速以及 NVH 表现确定。控制策略流程,如图 5 所示。

图 5 控制策略逻辑示意
因为电池过度放电会对电池的寿命产生不可逆的影响,首先会设置一个电池电量维持基准 SOC1 和电池电量极限基准 SOC2,当 SOC 降低到 SOC1 ~SOC2 之间,能量管理进入电量保持 CS 阶段,此时会根据加速踏板、制动踏板信号和车速信号查表计算串联额外充电功率,同时累加整车用电负载和 P3 电机轮端功率需求,计算出需求发动机功率,如果计算结果为发动机最优工作曲线发出功率大于整车需求最低功率要求,发动机按最优工作曲线工作,多余能量支持电池行车充电。当计算结果出现发动机最优工作曲线发出功率小于整车需求最低功率,一方面会通过电池放电功率补充,另一方面会通过拉升发动机转速提高发动机功率实现整车动力性功率需求。当 SOC 降低到SOC2 以下,电池不在补充功率,此时基于油门开度和车速,在保证车辆行驶需求功率外和满足 NVH 限值要求下,会维持电池充电直到 SOC 恢复到 SOC1 以上。基于以上能量管理策略,需要注意电池放电功率和发动机、发电机功率选型时匹配好 P3 驱动电机的功率,保证在馈电情况下仍可以发挥 P3 驱动电机的性能。
5 结语
综上,增程式变速器电机选型所需基本参数初步确认完成,需要基于初版参数同电机厂商交流电机电磁开发方案,输出电机详细参数特性,同时收集确认用于 Cruise 和 Simulink 仿真的其他系统相关零部件具体参数,共同搭建动力总成系统零部件数学模型和整车动力学模型验证零部件设计,寻优整车控制策略,指导整车能量管理标定。同步需要考虑最高持续车速、亏电最高持续车速以及高速爬坡等工况下整车热管理的散热性能边界是否达标。总之,增程式变速器的开发,不仅要通过一系列整车动力性边界计算确定电机参数,还需要考虑满足电机硬件设计边界下的控制策略、能量管理策略以及热管理边界,通过多轮仿真寻求最优解,最终确认增程式电动汽车驱动电机的选型。
参考文献
[1] . 基于 MATLAB 的新能源汽车仿真实例 . 北京:化学工业出版社,2020.4
[2] 赵航,史广奎 . 混合动力电动汽车技术 . 北京:机械工业出版社,2012.5
[3] 宋柯,章桐 . 增程式纯电驱动汽车动力系统研究 [J].汽车技术,2011(7):14-19.
[4] 焦磊 . 增程式电动汽车动力总成参数匹配及控制策略研究 [D]. 西安:长安大学,2013.
[5] Li Z H,Khajepour A,Song J H.A comprehensivereview of the key technologies for pure electricvehicles[J].Energy,2019,182 :824-839.
本文为“AI汽车制造业”首发,未经授权不得转载。版权所有,转载请联系小编授权(VOGEL100)。本文作者:王立维1 孙家振1 张振生1 王二朋1 王建1 王瑞平123,单位:1. 宁波吉利罗佑发动机零部件有限公司 2. 浙江吉利动力总成有限公司 3. 宁波上中下自动变速器有限公司 。责任编辑龚淑娟,责任校对何发。本文转载请注明来源:AI汽车制造业
AI汽车制造业
龚淑娟
李峥
相关推荐
-

-

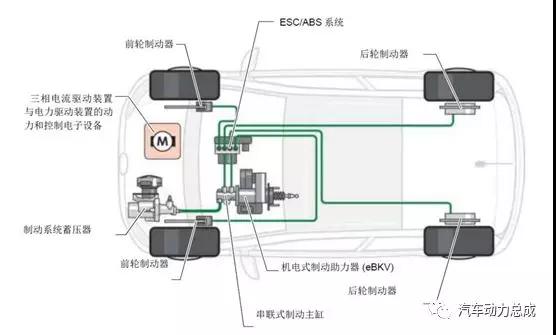
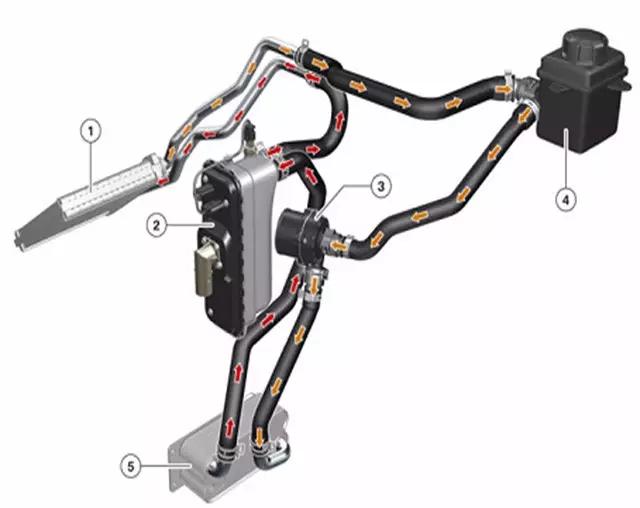
大众PHEV制动能量回收系统构成及工作原理
制动系统包括:串联式制动主缸、车轮制动器、机电式制动助力器、ESC/ABS 系统、制动系统蓄压器、三相电流驱动装置。机电式制动助力器可增大驾驶员施加的制动踏板操纵力。
2019-12-31
-


热点文章
-

直播预约 | 尺寸偏差、缺陷遗漏、反复整改?从试制到量产,如何从容应对车身质量挑战
2026-07-31
-

直播预约 | EINES-AI视觉赋能整车制造:焊装到总装的质量控制
2026-08-04
-

某间接式热泵架构电驱低温余热利用控制方法的仿真优化研究
2026-08-04
-

电动汽车分布式牵引力控制功能开发与优化研究
2026-08-03
-

德国马牌携手品牌大使尹正,共塑“无惧湿滑”的驾控安全新标杆
2026-07-30
-

奇瑞尹同跃:2000万辆以后,我们不再参加内卷
2026-07-28
-

质量为源:APIS助力中国汽车高质量发展
2026-07-30





评论
加载更多