仿真环境下智能驾驶测试场景可测性评估方法
0 前言
仿真场景作为驱动仿真测试执行的源头,承担着至关重要的作用,众多行业研究表明,仅通过实车道路采集获取到的自然驾驶场景无法满足当前智能驾驶算法测试验证需要,基于人为构建虚拟场景方式成为目前主流做法。然而,人为构建的虚拟场景其质量如何衡量尚无定论。另一方面,根据算法随机生成的大量场景常常难以筛选,且真实性与危险性也难以量化。
基于以上情况,本文提出了一种仿真环境下智能驾驶测试场景的可测性评估方法,基于仿真平台设计并搭建场景以试验验证其合理性,为快速筛选有效测试场景提供一种新的选择。
1 基于场景的仿真测试
在环仿真测试是仿真测试的重要组成,是指将智能网联汽车的一个或多个子系统以某种软件模型或硬件实体的形式嵌入到仿真模拟的虚拟环境中对智能网联汽车功能和性能进行测试,并据此对智能网联汽车进行评价的技术。在环仿真中,软件在环仿真测试(SoftwareinLoop,下称SIL)是一种将被测对象搭载在模型或应用软件上,并集成到仿真测试系统中,用于测试被测对象的功能、性能表现与代码一致性的测试方法。
目前主流智驾算法SIL测试方法均以仿真平台为载体,以仿真场景为驱动。基于场景的SIL仿真测试具体原理如图1所示。仿真场景开始时,仿真平台加载场景数据与主车动力学模型,之后每一帧,仿真平台通过待测算法输入的控制指令,结合主车动力学模型,计算下一帧场景及主车数据再发送给待测算法,待测算法再输出控制指令给仿真平台,以此循环,直到触发仿真停止条件。
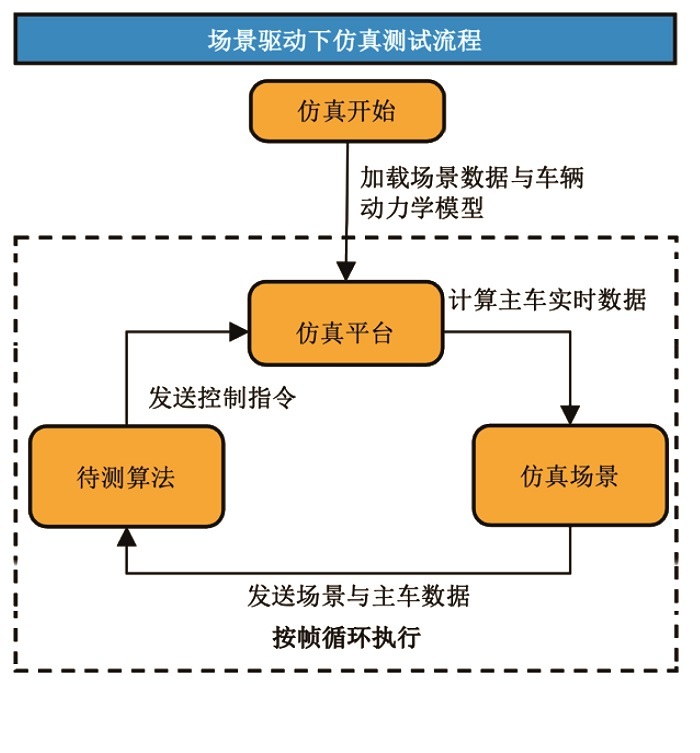
图1 场景驱动下的仿真测试
从SIL仿真测试原理中不难看出,仿真场景作为关键数据来源,支撑每一步仿真执行,其质量直接决定仿真测试效率。
当前常见的仿真平台有VTD、PreScan、SimOne和SimPro等。VTD是一款常用的自动驾驶仿真平台,由VIRES公司开发,其包含丰富的仿真功能,涵盖道路建模、场景建模、天气模拟等功能。PreScan是一款由西门子开发的专业级自动驾驶及高级驾驶辅助系统(ADAS)仿真软件,其支持摄像头、激光与毫米波雷达等传感器,用于模拟真实驾驶环境。SimOne是51WORD研发的一款仿真软件,具备场景编辑、传感器与动力学仿真、测试及回放等功能。SimPro为赛目科技开发的一款仿真软件,支持感知、规控算法测试,其内置可扩展的场景库,并具备场景泛化功能。
大部分仿真平台都支持仿真场景设计等功能,但缺乏相关场景可测性评价功能,难以衡量不同场景的真实性与危险性。王荣等人提出基于场景复杂度模型的自动驾驶车辆道路测试评价方法,该方法利用信息熵与引力模型对道路测试场景进行评价和分类,有助于选取典型场景。但该方法仅适用于实车道路测试环境,仿真场景与实车道路有所不同,且随机泛化生成的仿真场景不可控,很容易与真实世界不符,难以在真实度与危险度之间取得平衡。
本文围绕仿真环境下的场景,提出一种场景可测性评估方法,制定详细计算公式,可以根据实际需求,快速筛选出高真实、高危险的仿真场景,大大提高智能驾驶算法测试验证效率。
2 可测性评估方法设计
为解决上述问题,我们提出了一种评估自动驾驶仿真场景的方法,从真实度与危险度两个层面来评估场景可测性,并设计计算公式,可以对每个场景定量求出其场景可测性分值,用于评估场景可测性,并用于快速筛选出待测场景。方法包括图2中三个步骤。
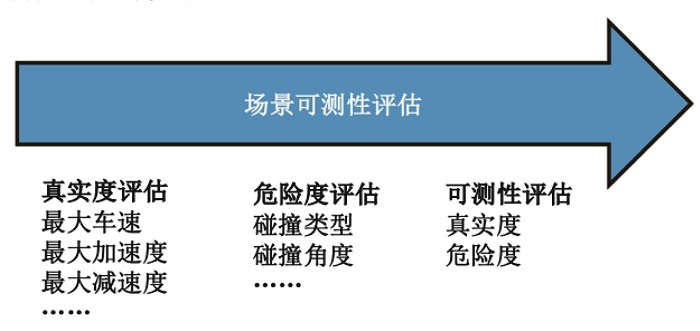
图2 场景可测性评估流程
通过定义场景真实度与危险度,并设计相关计算公式计算得分。公式中包含场景相关元素与关键参数,以尽可能贴近实际情况。通过依次计算场景的真实度与危险度,再将两者结合评估可测性。下面,分别针对真实度、危险度、可测性给出相关说明与计算公式。
2.1 场景真实度定义与计算
场景的真实度指场景实际能在真实世界发生的可能性,如真实度过低可能代表场景太极端,对其测试将毫无意义。为了能够对真实度进行量化,设计场景真实度计算公式。
具体的,通过比较其与真实世界中交通参与者的偏离程度进行衡量,偏离程度越大则表示真实度越低。利用场景关键参数在真实世界的极值作为参考,计算场景关键场景参数数值超出真实世界关键场景参数极值的幅度,之后通过ReLU 函数对其进行约束,只取偏离真实世界时的幅度,不偏离时修正为0,之后使用sigmoid函数修正数值。最终得出单个关键场景参数偏离度,评估场景与真实场景的偏离程度。
其中,真实世界关键场景参数表示某类型的交通参与者的车速、加速度、减速度等参数,极值表示其在真实世界中正常情况下(满足交规要求并结合真实驾驶数据)的最大值,如最大车速、最大加速度和最大减速度等。
具体的,单个关键参数的偏离度d通过公式来计算:

式中,p表示仿真场景关键参数最大值,p'表示真实世界中关键参数极值。
sigmoid与ReLU函数是一种常用的数学函数:
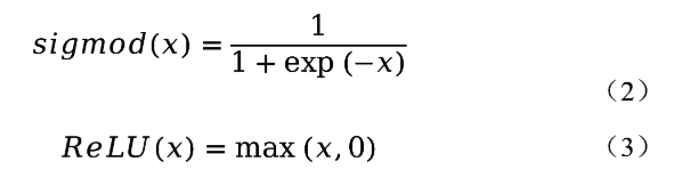
通过修改ReLU函数,并将场景中所有关键场景参数偏离度求和,进一步得出真实度t得分,见公式:

式中,n为关键场景参数个数。得出的真实度t为[0,1]区间的数字,用来衡量场景的真实度,越大表示真实度越高。
2.2 场景危险度定义与计算
场景的危险度指场景发生碰撞的可能性与碰撞验证程度。通过主车与目标物距离及速度差计算得出的前车预计碰撞时间(TimeToCollision,TTC),可以很好表征场景危险度,但存在一定局限。
(1)量纲问题:TTC的单位是秒,且数值通常大于1,如直接用于计算后续可测性得分会得出大于1的数值。尽管可以对TTC进行适当修正,比如取TTC的倒数作为指标以保证其数值落在0~1区间,但修正后的曲线通常并不能很好地表征实际情况。
(2)场景泛用性问题:TTC可以很好地表征同功能场景下不同参数的危险程度,如主车在60km/h、80km/h不同速度下前方50m前车突然制动的场景。但对于不同功能场景,难以横向比较危险度,如前车制动场景与前车切入场景下,同样的TTC数值可能对应不同的危险程度。
出于以上两点考虑,本文提出了一种场景危险度计算方法,解决量纲与场景泛用性问题,将数值约束在0~1区间,并且其数值可以跨场景表征危险度。具体来说,我们通过碰撞类型、碰撞目标、碰撞角度和碰撞车速来综合定义危险度。其中,碰撞类型大致可分为正面碰撞、侧面碰撞,碰撞目标大致可分为人、车、物。具体的,危险度 r 得分见公式:

式中,ct、co分别表示碰撞类型与碰撞目标权重系数,为0~1区间的常数,按照其实际类型划分,统一设定,如碰撞类型可将正面碰撞设为0.8,侧面碰撞为1,碰撞目标可将物设定为0.8,人设定为1,具体数值可灵活设定;v0表示场景中主车最大车速;v'表示真实世界中主车车型最大车速;vα用来衡量碰撞角度的影响,其计算公式如下:

式中,α表示碰撞角度(主车车身方向与目标车身方向夹角),v1表示碰撞目标速度。
2.3 场景可测性定义与计算
场景的可测性表示场景的测试价值高低,表明其能否很好地验证算法功能与性能表现。对于智能驾驶而言,是否能够应对危险场景、保证驾驶人安全是最重要的。但如果仿真场景只追求危险性而无法保证真实度,则测试结果也将毫无意义。
因此,基于仿真场景的特殊性,在保证真实度的前提下,危险度越高则认为仿真场景可测性越高,其得分也应该越高。若真实度不够,危险度再高,总体可测性得分也应该很低。同时,不同测试情况下可能对真实度的要求有所不同,如测试某些极端边缘场景可能愿意适当降低一些真实度转而追求危险度。出于以上考虑,仿真场景可测性得分计算公式定义如下:

式中,λ 为人为设定的[0,1]区间真实度权重系数,可根据实际测试需求动态调整;t 表示场景真实度得分;r 表示场景危险度得分。λ 设定越大,表示真实度对可测性得分的影响越大。最终,计算得出的场景可测性得分为[0,1]区间的数字,分数越高,表示场景可测性越高。
3 验证试验
为评估方法效果,设计如图3所示的试验验证逻辑,构建大量仿真场景并计算其可测性得分,结合场景实际情况,进一步分析方法有效性。主要包括仿真场景构建、可测性分析两个步骤。
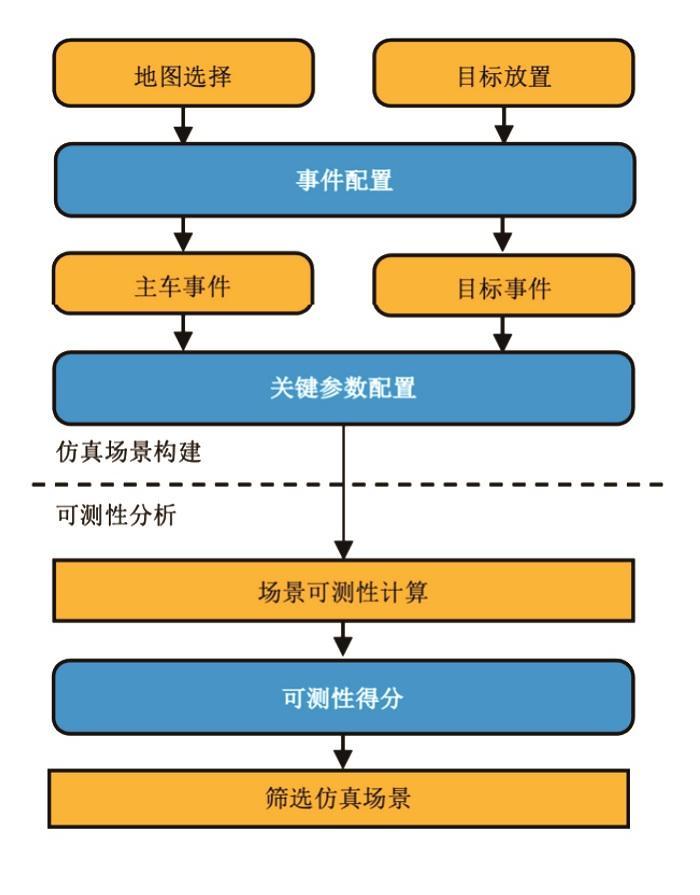
图3 试验验证逻辑
仿真场景构建:选取自动紧急制动场景作为试验场景,并设计具体场景内容。制定相关场景关键参数取值范围,并进行参数组合,得到实际场景。之后在仿真平台中构建场景,完成场景目标物放置并设置相关事件,构建场景。
可测性分析:针对不同场景,分别计算对应的真实度与危险度,并进一步得出场景可测性得分。其中危险度同步与TTC倒数进行比较,评估其计算效果。最终,后续仿真测试可根据可测性得分筛选仿真场景。
本次试验搭建AEB仿真场景,通过计算AEB场景真实度、危险度、可测性得分,结合TTC指标作为参考,进一步评估本方法有效性。
3.1 AEB仿真场景设计
为评估方法实际效果,设计前车制动、前方静止目标物两类AEB场景。
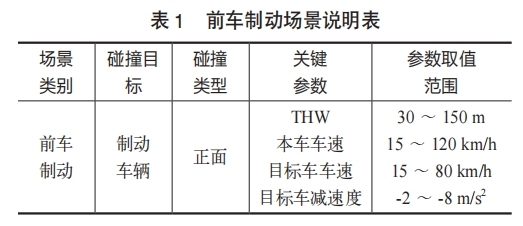
前车制动场景:主车按照一定速度匀速行驶,行驶路径前方有直线行驶的移动车辆,在驾驶人没有任何避撞措施的情况下,前方车辆突然开始制动,即将发生碰撞。前车制动场景碰撞目标为制动车辆,碰撞类型为正面碰撞,关键参数主要有THW、本车车速、目标车车速以及目标车减速度。具体场景参数取值范围详细说明如表1所示。
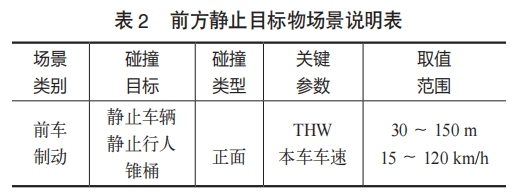
前方静止目标物场景:主车按照一定速度匀速行驶,行驶路径前方有静止车辆/行人/障碍物,在驾驶人没有任何避撞措施的情况下,即将发生碰撞。前方静止目标物场景碰撞目标为静止车辆、静止行人或锥桶,碰撞类型为正面碰撞,关键参数主要有THW、本车车速。具体场景参数取值范围详细说明如表2所示。
基于上述两种场景类别,按照说明表中取值范围进行参数组合,进行参数泛化,每种类别各构建具体场景500例,共计1000例场景,用于评估场景可测性并分析得分。
3.2 可测性得分计算
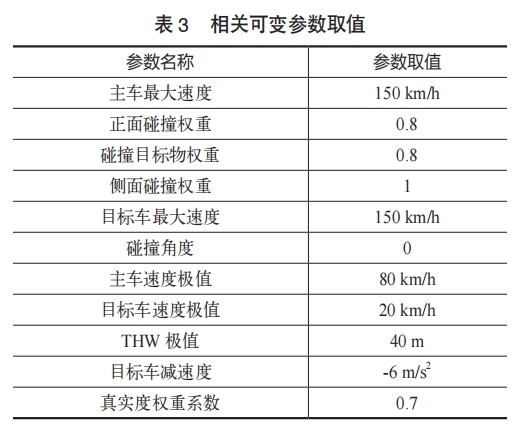
根据本文提出的可测性得分计算公式,使用Python编写程序代码,基于Pandas、Numpy、Math等库实现真实度、危险度、可测性得分等指标计算并将结果绘制成相关图例。相关可变参数取值如表3所示。
4 试验结果分析
根据Python程序计算场景可测性得分,并基于场景真实度、危险度、可测性三项指标绘制散点图。前车制动与前车静止场景结果分别如图4、图5所示,其中蓝色圆圈表示单个场景。
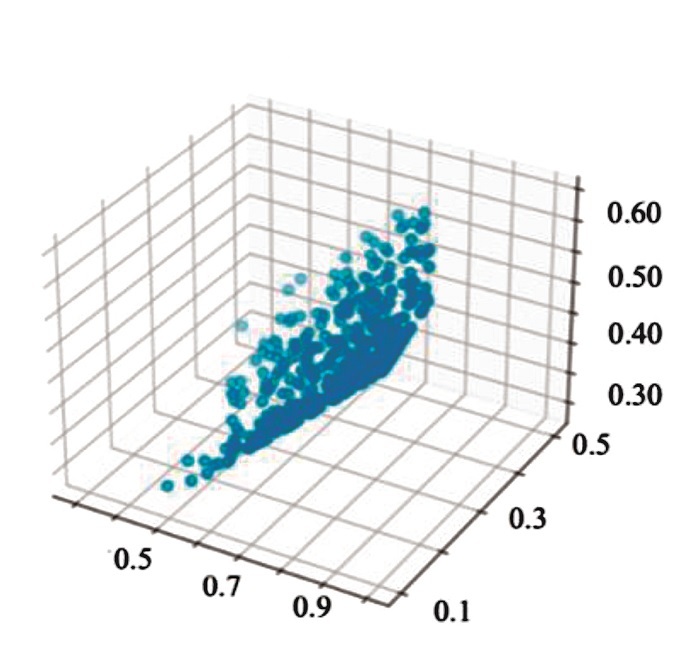
图4前车制动场景可测性结果
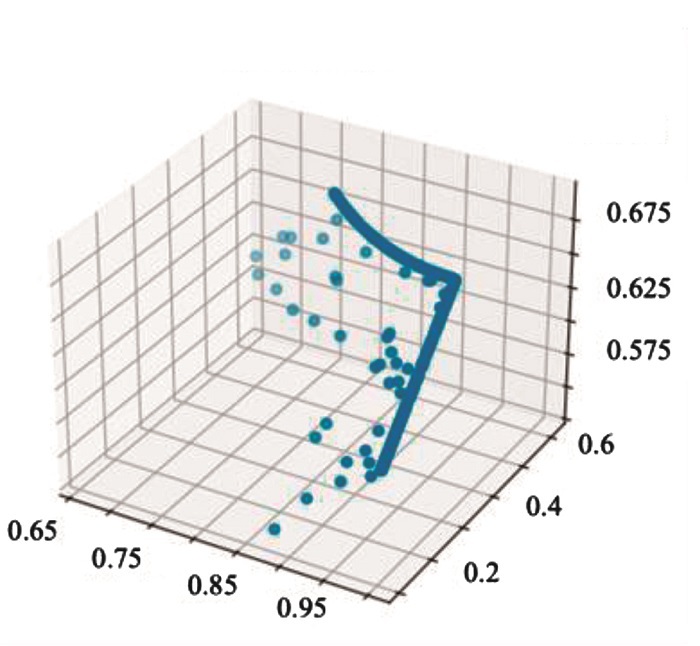
图5前车静止场景可测性结果
从散点图中可看出,在真实度一定的情况下,危险度越高,其可测性得分越高。危险度一定的情况下,真实度越高,其可测性得分越高。符合实际情况。
特别的,为检验危险度计算效果,选择前车静止场景,并将THW限定为100m,计算30~100km/h车速下危险度得分与TTC倒数,并绘制散点图,结果如图8所示。图中可看出,速度对TTC的影响呈现成线性关系,即在其他参数不变的情况下,无论速度多快,TTC的变化率总是相同的。而危险度随着速度的增加逐渐变得陡峭,速度越快,危险度的变化率也越快,这与真实情况相符。对比可见,危险度计算方法相较于TTC能更好表征实际场景危险程度。
为进一步分析关键场景参数对真实度、危险度以及可测性三项指标影响,场景数据中只改变某一关键参数,将其他参数取相同值,计算场景可测性得分,结果如图6~9所示。
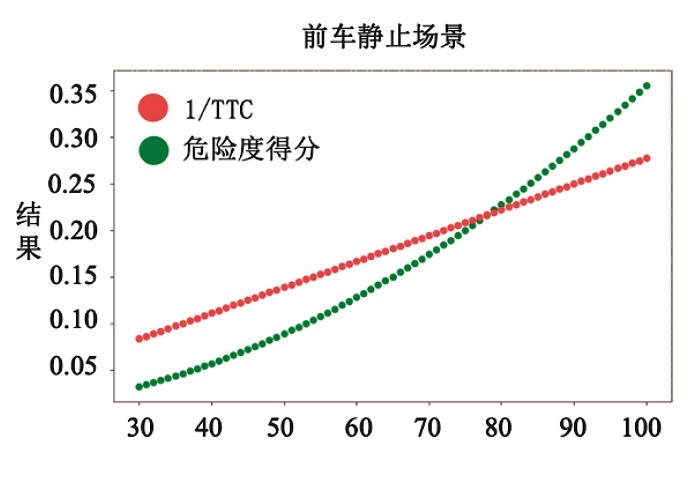
图6 危险度得分与TTC倒数
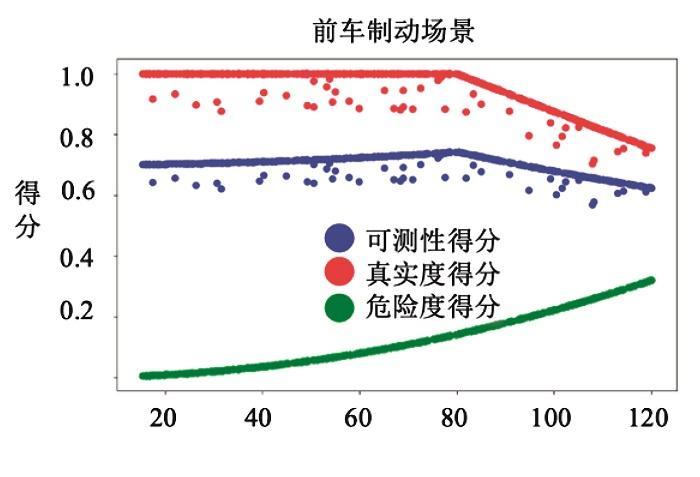
图7 主车车速影响—前车制动场景
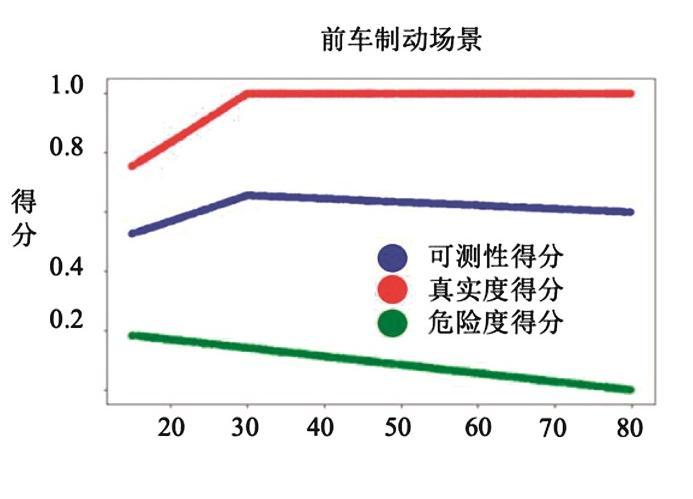
图8 目标车速度影响—前车制动场景
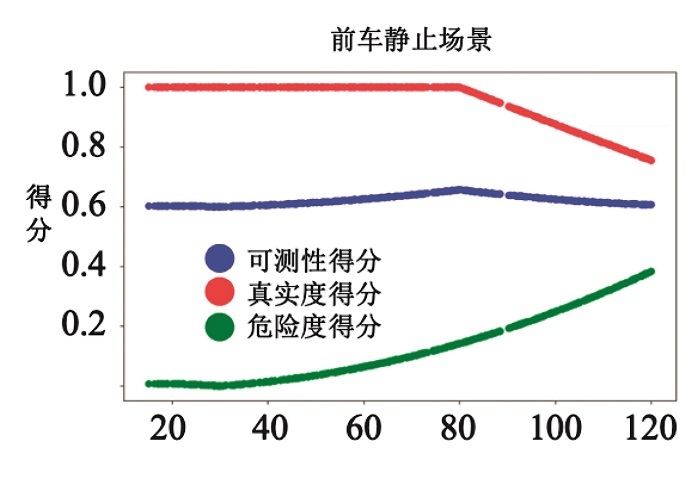
图9 主车车速影响—前车静止场景
前车制动场景下,主车车速上升时,危险度随之上升,真实度在车速达到极值前基本保持稳定,当车速超过极值时随之下降。可测性随着车速的提升随之提升,直到超过极值时持续下降;目标车车速上升时,危险度随之下降,真实度与可测性先随之上升,当目标车车速超过极值时基本保持不变。
前车静止场景下,主车车速上升时,危险度随之上升,真实度在车速达到极值前基本保持稳定,当车速超过极值时随之下降。可测性随着车速的提升随之提升,直到超过极值时持续下降。
上述结果表明真实度与危险度得分与场景实际情况相符,证明本文提出的场景可测性评估方法有效,可一定程度上表征场景可测性,能够进一步通过场景可测性筛选出更符合测试需要的场景,提高测试效率。同时,本方法可通过动态调整真实度权重系数,筛选更多边缘场景。
5 结语
本文提出了一种仿真环境下智能驾驶测试场景可测性评估方法,并构造仿真场景,设计试验进行验证。结果表明,该方法能够有效表征场景真实度与危险度,可用于评估仿真场景可测性,并用于筛选仿真场景,进一步提升仿真测试效率。同时,针对不同的测试项目,可根据实际需求,调整方法中真实度与危险度比例,动态筛选出更危险或更真实的测试场景。下一步工作将致力于仿真场景筛选自动化,通过开发自动筛选脚本嵌入仿真环境,自动化筛选高于预设可测性阈值的仿真场景。
参考文献
[1] 刘法旺,何丰,周时莹,等.基于场景的智能网联汽车模拟仿真测试评估方法与实践[J].汽车工程学报,2023(2):135-145.
[2] 王俊香,徐杰杰.基于组合测试的自动驾驶测试场景组合泛化生成[J].运筹与模糊学,2023,13(3):2441-2456.
[3] 李爽,周悦,张昕,等.面向效率与多样性的自动驾驶关键场景生成方法[J].计算机应用,2023,43(S02):157-162.
[4] 赵祥模,赵玉钰,景首才,等.面向自动驾驶测试的危险变道场景泛化生成[J].自动化学报,2023,49(10):2211-2223.
[5] 饶聪波,赵津,刘畅,等.面向自动紧急转向场景的自动驾驶测试用例生成方法[J].现代电子技术,2024,47(16):130-136.
[6] 朱冰,张培兴,赵健,等.基于场景的自动驾驶汽车虚拟测试研究进展[J].中国公路学报,2019,32(6):1-19.
[7]王荣,孙亚夫,宋娟.自动驾驶车辆道路测试场景评价方法与试验验证[J].汽车工程,2021,43(4):620-628.
本文为“AI汽车制造业”首发,未经授权不得转载。版权所有,转载请联系小编授权(VOGEL100)。本文作者:宋华 王积运 吴琼 陈波 朱陈伟,单位:安徽江淮汽车集团股份有限公司 。责任编辑龚淑娟,责任校对何发。本文转载请注明来源:AI汽车制造业
AI汽车制造业
龚淑娟
李峥
相关推荐
-

CTC电池底盘一体化技术难点与解决方案
CTC (Cell to Chassis) 电池技术是指电芯直接集成到车辆底盘内部的电池技术,直接省去从电芯到模组再到电池包的步骤,直接将电芯安装在车辆平台上。CTC技术思路与飞机燃料箱融于机翼一体不另做燃料箱的设计相类似,技术方案由特斯拉率先提出,首次应用于Model Y 车型上,是CTP(Cell to Pack)电池技术的进一步集成,其目的是减少零部件和总装工艺的数量,高度集成化实现降本增效的优势。
2024-12-19
-

智能座舱与智能驾驶技术演进分析
在智能网联汽车的时代背景下,智能座舱和智能驾驶技术逐步成为全球汽车产业的两大核心驱动力。高阶智能驾驶技术的快速迭代,推动了从L1到L4的技术进化,而智能座舱的发展则迅速提升了用户在车内的体验。
2024-12-18
-

赛力斯超级增程系统亮相第二届链博会 展现领先技术实力
11月26日,第二届中国国际供应链促进博览会在北京举行,大会旨在全流程展示各产业链条上中下游重点环节,推动大中小企业聚链成群、优势互补。问界全系车型、赛力斯超级增程系统等亮相大会。
2024-12-01



热点文章
-

智能汽车场景化开发:系统融合与 用户体验的协同研究
2026-07-20
-

“泰钽”来了!开启智能越野3.0时代
2026-07-22
-

基于传动效率的多模复合功率分流混合动力系统模式控制研究
2026-07-21
-

乘用车混合动力总成系统设计和性能仿真研究
2026-07-22
-

动力系统主导车市质变,增程器迈入系统竞争
2026-07-23
-

基于深度学习的电驱实验系统设计
2026-07-24
-

-
基于深度学习的电驱实验系统设计
针对传统永磁同步电机建模方法难以兼顾精度与实时性的问题,本文基于深度学习技术提出一种融合物理约束的永磁同步电机降阶模型,通过深度神经网络实现对电机非线性电磁特性的精细化建模。围绕所提降阶模型,搭建了电驱实验系统,并将该模型集成至电驱系统中,实现了实时硬件在环验证。在不同工况下对降阶模型和传统dq轴解析模型开展实验分析,结果表明,所提出的基于深度学习的永磁同步电机降阶模型在保证高精度建模的同时,实现了更好的动态性能。该模型支撑的实验系统可用于电驱系统的快速仿真与控制算法研究,具有良好的工程应用前景。
作者:
-
动力系统主导车市质变,增程器迈入系统竞争
-
“泰钽”来了!开启智能越野3.0时代
-
乘用车混合动力总成系统设计和性能仿真研究
-
基于传动效率的多模复合功率分流混合动力系统模式控制研究
-
智能汽车场景化开发:系统融合与 用户体验的协同研究





评论
加载更多