电机:人形机器人动力之源
执行器是关节运动核心
执行器是驱动机器人关节运动的核心部件,按驱动形式可分为旋转驱动和直线驱动(其驱动源本质仍为旋转电机)。由于传动部件(如减速器、弹簧等)与驱动电机在功能和结构上紧密耦合,电机设计必须综合考虑传动特性与机械架构。根据传动部件类型及其与电机的组合方式,机器人执行器可分为三类:
1) 柔性执行器(Flexible Actuator,FA),由电机结合高减速比减速器组成,其核心特征体现在三个方面:①高转矩密度:通过高减速比减速器设计显著提升输出转矩,实现较高的转矩密度。②具有机械谐振:由于谐波减速器中柔轮、齿隙及摩擦等弹性连接因素,系统存在多阶振动频率的机械谐振现象。③低力透明度和弱反驱性能:高减速比结构会增大反射惯量和反射摩擦等机械阻抗,从而导致力透明度降低和反驱性能减弱。
2) 弹性执行器(Elastic Actuator,EA)在柔性执行器基础上集成弹性元件,主要包括串联弹性、可变刚度和可变阻抗等类执行器型,主要特征表现为:①强抗冲击性能:弹性元件作为缓冲介质有效隔离冲击载荷,显著增强抗冲击能力。②高效率、高峰值转矩:通过被动储能机制实现高效率能量转换和高峰值转矩输出。③低力控制带宽:由于弹性元件刚度通常小于 10000Nm/rad,系统呈现较低输出阻抗,力控制带宽相对受限。
3) 准直驱执行器(Quasi Direct Drive,QDD)采用高转矩密度电机配合低减速比减速器的结构配置,其典型特征包括:①高力透明度和强反驱性能:通过降低减速比有效减小非线性误差和静摩擦力,从而获得优异的力透明度和反驱性能。②强抗冲击性能:减速器减速比的降低同时减少了机械阻抗,使系统具备良好的抗冲击能力。③低转矩密度:由于减速比对转矩的放大作用较弱,导致整体转矩密度提升幅度有限。
不同传动部件使关节执行器呈现差异化特性,导致对关节电机的需求也产生差异。柔性执行器虽降低了对电机的转矩需求,但需解决机械谐振问题;弹性执行器减小了峰值转矩要求,却需要提升力控制的动态响应能力;准直驱执行器仅通过电流环就能实现高精度转矩控制,但面临着提高转矩密度的挑战。
电机是执行器核心部件
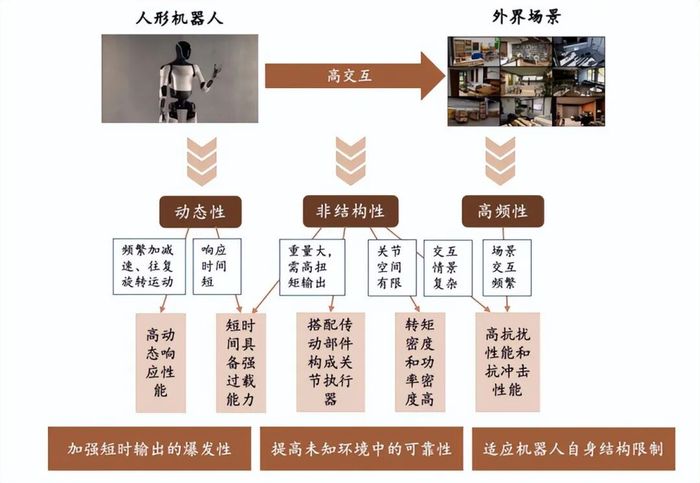
机器人通过与外界场景进行交互来完成各项任务,而外界场景具有动态性和非结构性,交互具有频繁性,这对机器人执行器提出了严格要求。从机器人的需求角度分析,电机具有如下特征:
(1)模块化设计:通过电机与传动部件集成,实现低速大转矩输出,以应对重载交互需求;
(2)强过载能力:在动态场景中快速响应时效性任务,需支持短时高力矩爆发输出;
(3)优异动态响应:适应频繁加减速及往复运动,确保复杂动作执行的精准性;
(4)高可靠性能:抵御频繁交互带来的冲击扰动,保障系统运行可靠性;
(5)高功率/转矩密度:在有限关节空间内实现高转矩/功率密度,可满足机器人轻量化需求。
相较于传统工业应用中的伺服电机,机器人电机更需加强短时输出的爆发性、提高未知环境中的可靠性,并适应机器人自身结构所带来的限制。
机器人关节电机需要强爆发性、可靠性及自适应性
来源:机械之心公众号、智元机器人官网、《机器人关节用伺服电机关键技术与展望》,国金证券研究所
常见电机分类与应用
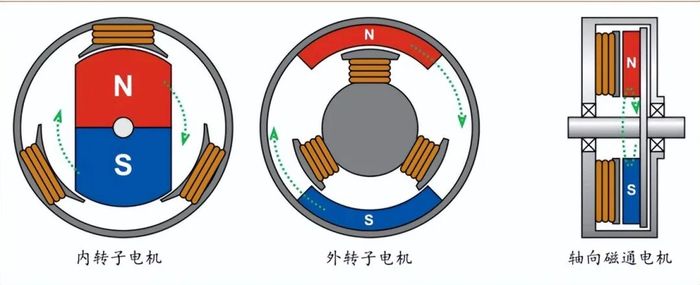
目前,常见的机器人电机按拓扑分类包括内转子径向磁通永磁电机、外转子径向磁通永磁电机和轴向磁通永磁电机。此外,空心杯电机作为一种特殊的永磁电机也常用于机器人灵巧手的微小型关节。
径向磁通电机和和轴向磁通电机拓扑结构
来源:《Development of In-Wheel Motor Systems for Formula SAE Electric Vehicles》
内转子径向磁通永磁电机是主流永磁电机,根据永磁体安装方式可分为表贴式和内嵌式两种。由于表贴式结构结构简单、成本低廉,加之关节电机转速要求不高,使得表贴式结构成为机器人关节的首选方案。随着机器人负载能力和动态性能的持续提升,对关节电机的转矩输出要求也相应提高,内转子逐渐被其他电机类型替代。
外转子电机凭借其结构优势,在特定应用场景中逐步替代内转子电机。该类型电机在同等外径条件下能提供更大输出转矩,兼具扁平内转子电机的特性优势,同时实现了更高的峰值转矩密度和速比性能。另外,外转子电机增大的气隙直径有利于采用更多极对数设计,有效抑制转矩脉动,这种特性使其在低减速比关节执行器中更为适配。基于上述优势,外转子电机主要应用于直接驱动机器人,或构成 QDD 用于准直驱机器人。
轴向磁通电机与传统径向磁通电机相比,具有轴向尺寸紧凑、转矩/功率密度高、空间利用率高的优点。其结构特点使其能够在相同外径条件下,具有更大永磁体空间和更多磁极数量,从而更易实现低速大转矩输出。然而该类型电机在实际应用中仍面临两大技术瓶颈:第一,该电机在持续高扭矩工况下会出现严重发热;第二,该电机工艺复杂性和材料利用率偏低,不利于批量化生产。
空心杯电机作为一种特殊永磁伺服电机,采用无铁芯圆筒形绕组转子结构,具有转子惯量小、无铁耗和齿槽转矩的特点。该设计使其具备转矩波动小、运行平稳、效率高和动态响应快的优势,适合应用于对体积、精度和灵活性要求高的机器人灵巧手领域。但由于空心杯电机输出转矩有限,实际应用中需要配合高减速比减速器及滚珠丝杠、蜗轮蜗杆或腱绳等传动机构组成级联式柔性执行器系统。
机器人用电机拓扑结构对比

来源:《机器人关节用伺服电机关键技术与展望》,国金证券研究所
注:可靠性的衡量标准主要为冲击载荷作用下发生故障和极端工况下升温烧毁的可能性
通过分析机器人电机的峰值转矩密度与尺寸参数关系,可建立典型应用型谱:空心杯电机适用于 8-20mm 直径的低径长比微型关节,主要应用于灵巧手等精密部件;内转子电机主导 30-80mm 直径的中径长比关节,主要应用于机械臂等上肢系统;外转子电机则适配 100-180mm 直径的高径长比关节,适合腿足式机器人等高动态下肢需求。轴向磁通电机具有高转矩密度特性,但由于其存在散热问题,当前实际应用有限。
思瀚研究院
龚淑娟
李峥
相关推荐
-

零件装配防错深度探索——简排序与浅视觉结合
针对传统排序件工艺中防错问题频发的现状,并结合智能制造的发展趋势,我们分析了不同视觉识别技术的特性,以及制造工厂在设备、技术和人员能力方面的现状,最终制定了如下方案:首先进行货架初排序扫码,再融合模型匹配视觉技术进行二次检查。该方案成功实现了蓄电池的“零错装”。
2026-01-13
-

电池包母排工艺智能装配系统的设计与实现
本项目在行业内首次实现了电池包母排的自动化智能装配,所设计的系统包括柔性母排供料器(可处理4种不同尺寸母排)、多功能一体化夹具(具备间距调整、拾取、放置和紧固功能)、协作机器人、AGV搬运机构、电控机构及视觉定位系统。通过各单元的协同工作,实现了电池包母排装配工艺的智能化作业,显著提升了装配过程的安全性、效率与品质。
2026-01-09
-

MEB电池弹性生产模式的实践与创新
MEB电池作为整车高价值的核心部件,其生产规模、节奏及多品种混线生产方式的适应性直接关系公司成本控制与市场响应能力。一汽大众动力科技有限公司创新推行MEB电池弹性生产模式,通过数字化管控与全要素协同,系统性应对低库存下的“生产保障风险、间歇生产冲击和客户需求波动响应不及时”三大核心挑战。实践表明,该模式为汽车核心部件在动态市场环境下的精益生产提供了可借鉴的生产组织管理范式。
2026-01-08


热点文章
-

基于深度学习的电驱实验系统设计
2026-07-24
-

动力系统主导车市质变,增程器迈入系统竞争
2026-07-23
-

采埃孚全球电子助力转向系统产量突破1亿
2026-07-24
-

-

-

AHTE 2026 展后报告新鲜出炉
2026-07-24
-

AMTS 2026 展后报告新鲜出炉
2026-07-24
-
基于深度学习的电驱实验系统设计
针对传统永磁同步电机建模方法难以兼顾精度与实时性的问题,本文基于深度学习技术提出一种融合物理约束的永磁同步电机降阶模型,通过深度神经网络实现对电机非线性电磁特性的精细化建模。围绕所提降阶模型,搭建了电驱实验系统,并将该模型集成至电驱系统中,实现了实时硬件在环验证。在不同工况下对降阶模型和传统dq轴解析模型开展实验分析,结果表明,所提出的基于深度学习的永磁同步电机降阶模型在保证高精度建模的同时,实现了更好的动态性能。该模型支撑的实验系统可用于电驱系统的快速仿真与控制算法研究,具有良好的工程应用前景。
作者:
-
动力系统主导车市质变,增程器迈入系统竞争
-
“泰钽”来了!开启智能越野3.0时代
-
乘用车混合动力总成系统设计和性能仿真研究
-
基于传动效率的多模复合功率分流混合动力系统模式控制研究
-
智能汽车场景化开发:系统融合与 用户体验的协同研究





评论
加载更多