AGV行业综述与技术发展分析

AGV发展历史和行业简介
AGV是(Automated Guided Vehicle)的缩写,全名“自动导引车”,是可以自动装(卸)货物(也有部分手动),并按照规定路线自动行驶到指定位置完成卸(装)货物,也就是完成From A to B的过程。按照分类属于“轮式移动机器人”这一大类。
人们公认的世界上第一台AGV诞生于1953年,由美国Barrett Electric公司研发制造。经过近70年的发展,整个AGV从技术、产品种类和应用上都有了长足的发展。其中导航技术的发展从最开始的固定路线的电磁导引,磁条导引,到融合(磁钉、二维码)惯性导航,再到可以自由路线激光反光板导航,再到目前可以不依赖任何人造环境更智能的自然导航。导航技术的发展使得AGV的产品种类越来越多,应用也越来越广泛。产品种类上从简单环形半自动牵引,到自动装卸,到低层托盘搬运叉车,高位窄巷道堆垛叉车,再到复合机械手AGV等;应用上基本覆盖了整个仓储制造环节:入库、出库、分拣、生产供线、产线制造、下线入库、出库等。
随着近些年来社会的进步,各国都提出了自己工业的发展规划:德国工业4.0,中国制造2025等。作为智能制造一个重要的环节和设备,整个AGV行业也有了较大的发展,各个预测机构都对未来AGV的发展给出了较好的增长判断,预计到2023年整个行业产值将超过100亿美元,其中中国将达到或者超过100亿元的产值。

图1:全球AGV行业年产值及预测

主要产品分类及应用现状
1、叉车AGV
整个制造业和物流行业内,绝大多数是以托盘形式的货物流通。叉车是整个制造业中最常见也是最重要的搬运工具。叉车行业2019年的销售量预计在170万台左右。
传统人工叉车到无人的叉车AGV是叉车行业的发展趋势,有点类似于无人驾驶的汽车。但相比无人驾驶在场景复杂度和实现难度上,叉车AGV实现上要简单许多,实际上在90年代就已经开始应用激光导航的自主叉车AGV。目前来看叉车AGV在应用上已经不存在技术难度,行业上已经有很多成熟应用。
叉车从应用上主要分为五类:托盘搬运车、电动堆高车、平衡重叉车、前移叉车、窄巷道叉车。从目前叉车AGV的应用来看,主要还是集中在以地面或者低位搬运为主的托盘搬运车和电动堆高车,相比于对技术难度和成熟度要求更高的高位前移叉车和窄巷道叉车应用较少,但是市场需求很大,能解决人工操作难,招工难的问题。
此前的叉车AGV主要还是以改造人工叉车为主,尤其是以新松、昆船、机科等老牌AGV厂家,发展较早,在改造叉车AGV行业占比较高,如图4为昆船公司研发制造的叉车改造AGV在制造业中的应用。近几年出现的趋势是:逐渐开始出现以专为AGV设计的叉车车体,能实现更小的车体尺寸,更灵活的控制方式(全向移动)。相比传统改造叉车AGV,这种专用的AGV车体在作业巷道宽度上能减小30%,转弯半径降低40%。目前美国的JBT公司、德国的AGILOX公司、美国的德马泰克公司、中国的兰剑智能公司均推出了自制AGV车体产品。图5为兰剑智能研发制造的AGV专用车体在汽车制造行业的应用,比如2019年已成功用于某汽车发动机齿轮生产车间和某日化品生产车间。

图2:由昆船智能研发改造的叉车AGV

图3:由兰剑智能研发制造的AGV专用车体
2、移动搬运单元
除了以托盘为主的叉车搬运形式外,还有以料箱级别或轻型托盘级别为主的搬运单元,尤其是在3C制造、日化制造等行业。目前通用的做法是设计一通用底盘,如图6所示,在这基础之上根据不同的尺寸和对接方式加装不同属具,如图7所示。目前移动搬运单元这块市场发展较快预计到2023年会行业产值将达到69亿美元,如图8所示。目前丹麦的Mobile Industrial Robots 公司、美国的Fetch公司、中国的兰剑智能公司均有此类产品应用在国内市场。

图4:兰剑智能公司研发制造的移动搬运单元

图5:属具功能模块关系图
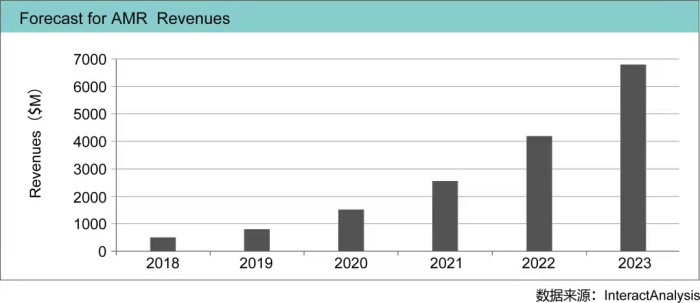
图6:移动搬运单元年产值及预测
移动搬运单元这一块的发展有点类似于机械手:机械手作为本体是不能直接应用,需要根据不同的需求加装不同的属具完成相应工作;移动搬运单元也有望实现这一目标,作为一个行业标准间应用到各行各业,并产生行业“4大家族”。

技术方向和发展分析
1、导航定位
导航定位技术是AGV最核心的技术,解决“我在哪?”的问题,整个AGV的发展史可以看作是导航技术的发展史。大致可以分为:电磁导引,磁条导引,惯性二维码导航,激光反光板,激光自然导航(2D,3D)等。
最早的AGV采用电磁导引,如图9所示,需要在地上开槽,铺设导线产生磁场,然后AGV就可以按照预设的路径行走。磁条导引也是类似,需要贴上带有磁性的磁条,不需要地面挖槽。这种方式的缺点很明显:非常不灵活,一旦路线有所变动需要非常大的改造成本。新松公司在汽车生产线上大量采用该种导航方式产品。

图7:磁导引AGV
惯性二维码导航在需要运行的区域铺设固定间距二维码,图10所示,AGV识别二维码的位置实现自身定位,在两个二维码之间多采用编码器、IMU惯性单元等传感器作为辅助。二维码导航因其地面贴的二维码容易造成损坏,如果在人机共存的区域工作维护成本较高;所以大部分都在封闭的环境中应用。目前快仓公司、Geek+公司等企业均采用过该技术并应用在产品中。

图8:二维码导航AGV
激光导航相比其他导航,在灵活性上要高很多,如果有任何路线变化只需要在软件上更新就可以了,而且基本不存在维护问题。激光反光板导航需要在周围环境布置一定数量的反光柱来辅助定位。为了便于应用,很多激光传感器厂家比如SICK公司的NAV350系列产品,或者顶级的AGV车载控制方案解决商NDC公司,均在传感器内部预先写入了导航定位算法,方便提供给AGV厂商。只是产品因融合了软件算法,因此采购成本较高。比如昆船、机科、怡丰等公司均采用过此类导航产品。
而最新的激光自然导航则可以对环境基本不做任何改造,直接对周围环境建模,实现自身定位,目前主流的还是以2D激光为主平面建模,图11所示,也有用3D激光实现的3D建模,图12所示。

图9:2D自然导航建模

图10:3D自然导航建模
主要导航技术对比如下表所示:
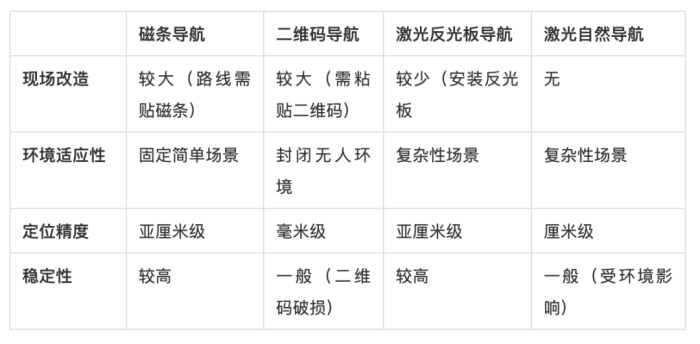
上述这些导航技术,其实没有一个one for all的完美解决方案,其多少都存在自己的局限性。比如最新比较热点的自然导航,虽然确实有比较大的优势,但是也有其自身无法克服的弱点,比如无法在对称的走廊里运行,如果环境中存在其他对称位置,也是无法完成初始定位定的,以及如果要想稳定的达到mm级别精度也是很难的。所以未来的发展方向是以激光导航为主,辅以其他方式(反光板、二维码、视觉等)的混合导航方式,实现适应所有环境,并达到很高稳定性和精度的工业应用。例如Mobile Industrial Robots公司采用自然导航+人造几何特征的方式,兰剑智能公司采用自然导航+反光板特征的方式。以上方式相比激光反光板的导航方式,对环境的兼容性更好。此外,以上方式多为厂家自主开发导航算法,只需支付激光雷达的硬件成本,因此总成本更低,更有利于产品应用推广。
在实际应用中为了能够适应长时间的动态环境变化,例如货架区、缓存区等,目前最新先进的技术需要在AGV运行期间实现实时更新地图,多AGV分别将实时数据上传至服务器,服务器在更新一定量变化之后推送新的地图至各AGV,目前法国的BALYO公司、中国的兰剑智能公司均已采用该技术,并在项目中成功应用。
2、控制
AGV的控制要解决的问题是“我如何去?”,换句话说:AGV控制上一直以来的目标是如何能够达到或者超过人的效率和灵活性。
AGV产品种类的多样,成熟驱动方式也是有很多种:双轮差速,单舵轮,双舵轮,麦克纳姆轮等。驱动方式也是一样:没有最好的方式,只有最适合的方式。差速驱动简单灵活性高,但单舵轮驱动在操控稳定性上要优于差速,双舵轮可以实现车的全向移动,但相比麦克纳姆轮需要多换向时间,且两轮同时接触地面的难度更大。麦克纳姆轮虽然换向时间更短,但轮子磨损较快,维护成本更高,适合应用在作业量较小的应用场景。仙知、兰剑智能公司均采用过双舵轮底盘的驱动方案。
除了以上方式,目前还有一种新型的底盘结构实现全向运动,即一个舵轮与两个转向轮配合使用,相比双舵轮方式,该方法很好的解决了地面接触问题,同时轮子维护也很方便,目前兰剑智能公司已采用该技术,已在汽车行业和快消行业都有成熟应用。
随着伺服技术的发展,越来越多的AGV产品开始应用。比如传统的前移机构多采用液压驱动,采用伺服驱动的方式可以大幅提高速度和精度,兰剑智能公司的前移叉车AGV采用该种方式;另外舵轮式的转向机构也开始使用绝对值编码器伺服,可以减少上电找原点的过程。
为了达到人的灵活性和效率,越来越多的新技术开始应用。为实现人操控的流畅和稳定性,以模拟人操控路线的贝塞尔曲线控制技术开始逐渐取代普通的直线和圆弧应用到路线跟踪上,贝塞尔曲线阶数越高越能实现复杂的路线。
此外,对于贝塞尔曲线来说,阶数越多,同样条件下车走的越顺滑,振动越小,货物越稳,效率越高。因此若想取得理想的应用效果,通常至少需要3阶及以上。目前兰剑智能公司自主开发了4阶贝塞尔曲线控制算法,用于控制AGV车辆行走录像。图15所示为4阶贝塞尔曲线,图16所示为3阶贝塞尔曲线。

图11:4阶贝塞尔曲线原理示意图

图12:3阶贝塞尔曲线原理示意图
另外自主路线规划和主动避障技术也逐渐开始应用,使得AGV在应用上越来越灵活,不会因为路径上的障碍物而停止运行,提高了AGV车辆的智能化水平,如图16所示为AGV主动避让一障碍物。目前德国的AGILOX公司与中国的兰剑智能公司均具有该项技术,并应用在实际项目中。

图13:AGV主动避障
3、3D视觉
随着技术的发展,同样AGV也边得越来越智能。作为目前智能设备非常重要的传感器:视觉也逐渐开始应用到AGV上。
其中一项非常重要的应用就是托盘及料箱位置的二次识别定位。在AGV于人交接的位置,通常人的放置不会很准,而AGV只能依据预设的坐标来叉取货物,这就需要AGV具备二次校准的能力:依靠3D相机,结合3D视觉识别算法识别并定位托盘和料箱新的空间位置,更新其取货坐标,目前法国的BALOY公司、中国的兰剑智能公司已具备该技术,并应用在项目中。而且通过自主开发的识别算法,还可以识别不同类型的托盘。如图17所示。

图14:带有3D视觉的AGV叉车识别托盘
另外传统定的AGV一般使用2D激光作为避障传感器,其缺点就是只能检测一固定平面的障碍物,对于高于或低于此平面物体都是其盲区。3D传感器可以克服此缺点,能直接检测一个3D空间内的障碍物,较好的解决盲区问题,增加AGV的安全性,德国的Agilox公司、中国的兰剑智能公司AGV产品均已采用该技术并应用在项目中,如图18所示。

图15:带有3D避障的AGV叉车
4、多机调度
多数应用场景需要不只运行一台AGV,这就需要一个AGV调度系统来发挥多机的优势和解决多机调度的问题。AGV调度系统的主要任务或者核心指标是三个:路径规划、任务调度和交通管控。
路径规划指在具有一定障碍物的环境中(此环境可以通过 AGV 与环境的交互感知),给定一个起始点和目标点,参照一定的准则,如最短路径因素、最少花费时间、最少拐弯次数,最少花费费用等等,在所处环境中搜索出一条最优的无碰撞路径。
任务调度是指当系统产生运输任务时,确定如何将这些任务分配给系统中的AGV来完成,使所有任务的运输损失之和最小。任务调度主要分为两种:任务找车和车找任务。AGV优化调度就是首先进行路径规划,基于己经规划好的AGV路径,按照一定的调度规则、约束条件,将任务合理有效的分配给系统中的AGV。任务调度一般都采用启发式算法来实现。其中,调度目标为最小化AGV数目、最小化总运输时间或者最小化总运输距离等。将某一时刻的调度任务解释为:为一个AGV选择最佳的任务集及最佳的路径,或者为一个运输任务选择合适的AGV及运输路径。
交通管控的核心是解决AGV冲突。在多 AGV 调度系统中,冲突定义为资源上的冲突,包括时间资源和空间资源。在同一时刻任何一对物体不能占用同一公共的区域。冲突的分类主要分为三种:相向冲突、路口节点冲突和占用冲突。占用冲突主要指占用道路、占用目标节点、速度不一致产生追及。
冲突解决的办法是制定一系列的规则。常见的规则有优先级设置规则(任务或车)、绕行规则和其他车道设置的交通规则等。采用不同的路径规划技术和任务调度技术,系统冲突的发生率也说不同的。因此,AGV调度的三大关键技术本质上是相互关联在一起,相辅相成的,顶级AGV车载控制系统供应商NDC公司也是采用该种技术方案。
目前更为先进的方式是采用基于时间窗的预测方法解决多车的路径规划和冲突问题。时间窗法指根据 AGV 占用空间资源的起始时间和终止时间定立出对资源占用的时间窗,当不同 AGV 占用资源时间窗没有重叠时,则表明没有发生碰撞。若有潜在碰撞产生,则调整原有时间窗实现避碰。多车按优先级依次调整时间窗。基于时间窗的预测方法相比常规的设置交通规则方法,可以提高约10%的系统工作效率,兰剑智能公司产品已采用该技术并应用在项目中。
未来人工智能AI技术也会在该领域有望获得显著应用,比如基于AI算法开展大规模AGV集群调度和控制,提高AGVS系统协同搬运作业能力,是未来AGV调度发展的方向。基于AI技术的调度算法,实现任务的最优分配、多AGV路径规划以及交通管控,让AGV集群能协调作业,互相合作又互不干扰,发挥出最优的效能,目前多家AGV公司,包括兰剑智能在内,均在研发之中。
在AGV近70年的发展历程中,国外厂商作为该项技术和产品的原创者、先行者,一直处于市场保有量大、技术较为领先的位置;国内厂商自20世纪90年代合作引进后,很长一段时间内AGV企业不多、产量不大,主要是昆船等国内企业在烟草行业有所应用;2010年后,随着国内汽车行业的快速发展,新松等国内企业生产的性价比高、轻负载及低定位精度的移动机器人,开始在汽车动力总成、冲压、焊装及总装四大工艺车间迅速推广;2014年后,国内电商行业爆发式增长,极智嘉、海康、快仓等国内企业生产的类Kiva货架搬运机器人,在电商仓库内的仓储、分拣环节大量应用;
2018年后,能够代替叉车的、具有大举升高度AGV的需求迅速增加,以兰剑智能为代表的国内优秀企业率先研究并取得了较大规模的实际应用,国内企业在该领域有望在高端市场和技术研发方面实现弯道超车。
Soo56
龚淑娟
李峥
热点文章
-

智能汽车场景化开发:系统融合与 用户体验的协同研究
2026-07-20
-

“泰钽”来了!开启智能越野3.0时代
2026-07-22
-

基于传动效率的多模复合功率分流混合动力系统模式控制研究
2026-07-21
-

乘用车混合动力总成系统设计和性能仿真研究
2026-07-22
-

动力系统主导车市质变,增程器迈入系统竞争
2026-07-23
-

基于深度学习的电驱实验系统设计
2026-07-24
-

-
基于深度学习的电驱实验系统设计
针对传统永磁同步电机建模方法难以兼顾精度与实时性的问题,本文基于深度学习技术提出一种融合物理约束的永磁同步电机降阶模型,通过深度神经网络实现对电机非线性电磁特性的精细化建模。围绕所提降阶模型,搭建了电驱实验系统,并将该模型集成至电驱系统中,实现了实时硬件在环验证。在不同工况下对降阶模型和传统dq轴解析模型开展实验分析,结果表明,所提出的基于深度学习的永磁同步电机降阶模型在保证高精度建模的同时,实现了更好的动态性能。该模型支撑的实验系统可用于电驱系统的快速仿真与控制算法研究,具有良好的工程应用前景。
作者:
-
动力系统主导车市质变,增程器迈入系统竞争
-
“泰钽”来了!开启智能越野3.0时代
-
乘用车混合动力总成系统设计和性能仿真研究
-
基于传动效率的多模复合功率分流混合动力系统模式控制研究
-
智能汽车场景化开发:系统融合与 用户体验的协同研究





评论
加载更多