一种智能化隐藏式外开把手开发
根据市场常见的隐藏把手结构,可以按照以下标准进行分类。
1)隐藏把手动力来源:按照隐藏把手动力来源看,一般分为机械隐藏把手及电动隐藏把手两类。机械隐藏把手无电机配置,需要人手进行手动进行把手弹开操作,特斯拉Modle3为典型的机械隐藏把手结构。而电动隐藏把手一般会配置电机进行电动操作,通过遥控钥匙、接近感应、PEPS以及车门锁锁止开关操作进行电动动作。当然,一般为了避免车辆亏电后把手无法操作,电动隐藏把手会配置机械操作备份,典型结构如捷豹F-TYPE、吉利几何系列、icon及路虎星脉等车型。
2)隐藏把手动作模式:按照隐藏把手动作模式看,一般可分为平动式以及跷跷板式等结构。
隐藏把手主要结构
隐藏把手主要由手柄、支撑机构、电驱动及传动机构、输出机构以及其他电器机构组成。手柄机构是乘客接触部件,支撑机构主要提供其他机构装配载体,并与车门进行装配连接。电驱动及传动机构主要为手柄的自动弹出提供动力并将动力传递到手柄上。输出机构主要功能是向把门锁等下游部件传递作用力或电信号,执行开启动作。其他电器机构主要包含线束及其插接件、微动开关及照明等部件,用以向BCM或控制模块等部件进行信号传输或提供氛围灯照明等。
智能隐藏把手主要控制原理
1.隐藏把手控制原理
一般而言,隐藏把手由BCM或专用的把手控制器进行驱动控制。把手内部包含的微动开关可向BCM/把手控制器反馈把手位置信息。BCM/把手控制器根据上级指令(如遥控钥匙信号,PEPS指令、车门锁中控开关等)并通过判定微动开关信号向隐藏把手的电驱动机构(电机)进行供电和断电,实现把手展开和折叠的动作。
本文介绍一种隐藏把手的控制原理:BCM与把手控制器通过LIN进行信号传输交流,BCM主要负责接受上级指令并反馈给把手控制器,而隐藏把手由把手控制器进行具体操作控制。
2.隐藏把手展开、折叠动作精确控制原理
在把手结构设计时,应对把手折叠、展开状态进行精确监控控制,常用的状态监控元器件有微动开关、霍尔传感器等。为了避免堵转工况、降低结构损伤及考虑手柄动作一致性要求,推荐在把手折叠和展开两种状态下至少布置两个微动开关进行确认检测控制,如图1~图3所示。
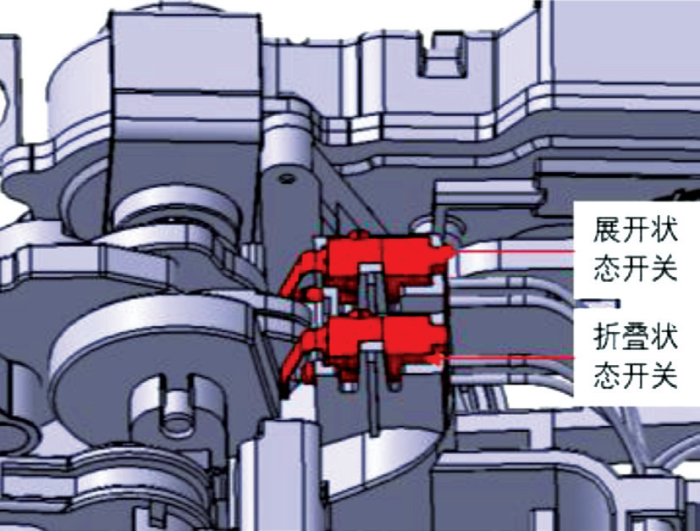
图 1 隐藏把手微动开关布置示意图
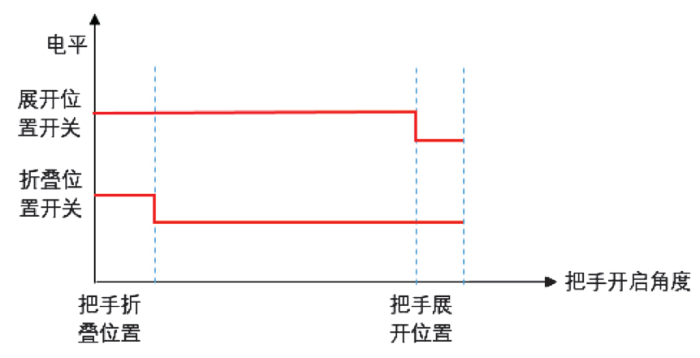
图 2 把手展开过程微动开关波形示意图
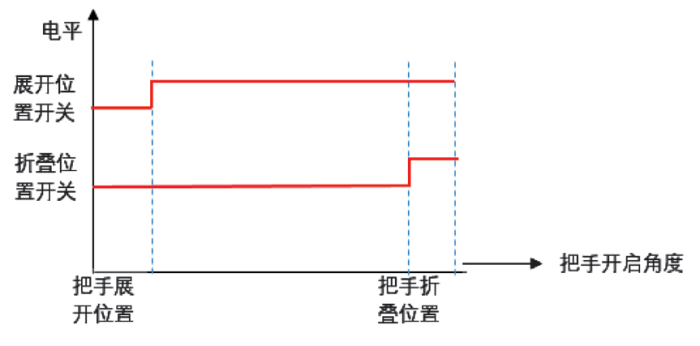
图 3 把手折叠过程微动开关波形示意图
鉴于隐藏把手布置位置位于车门湿区,要求优良的防水性能(IP67级及以上)和耐久性能。不建议选用后续做TPV包胶防水处理的微动开关,推荐采用后处理灌胶密封结构微动开关,以避免后续装配工艺或使用过程中因高低温交变中造成微动开关防水层开裂进水风险。
隐藏把手布置与安装结构设计
1.隐藏把手布置设计
隐藏把手相较于传统把手,其横向尺寸较大,需要重点关注,主要关注隐藏把手与车门玻璃及其导槽的安全间隙(图4),避免关门时玻璃振动与隐藏把手出现碰撞异响。
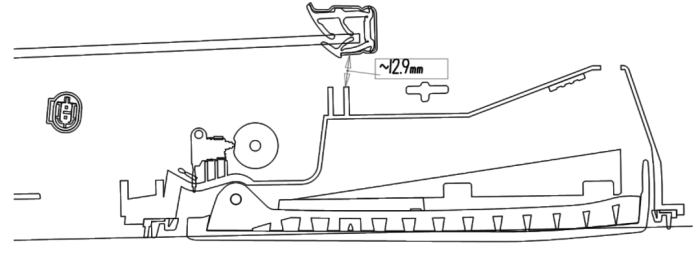
图 4 隐藏把手布置简图
在造型阶段需要控制隐藏把手布置位置车门外板外表面与车门玻璃的Y向间隙,按照布置以及操作空间要求等经验看,间隙需要≥75mm。
2.隐藏把手安装结构设计
与传统把手不同,隐藏把手由于开闭动作需要,无法直接安装在车门外板上,需要在车门上设计专用的把手安装加强板。另外,因车门焊接误差、把手自身制造误差等因素,为了确保把手安装间隙面差的保证,隐藏把手紧固件需要设计为可调节式(即X/Y/Z三向调节结构),一般而言,常见的隐藏把手紧固组件分为公差吸收器结构及双头螺柱紧固组件结构,如图5所示。

图 5 隐藏把手双头螺柱紧固组件结构简图
安装工艺介绍及解决方案
隐藏把手为了保证装配间隙面差,同时兼顾生产线生产节拍需求,建议制作专用的把手装配工装,确保装配效率及合格率。以下根据某车型隐藏把手开发总结的典型问题,即隐藏把手执行器工作噪声问题。
在某车型开发过程中,发现隐藏把手在执行电动展开及折叠过程中执行器工作噪声偏大,影响客户使用观感。在经过机械结构部分降噪措施(如提升齿轮组加工精度、切换低噪声电机及使用降噪油脂)实施后,降噪效果仍然难以达到客户需求。
为了解决该问题,决定从把手电机控制方式进行优化,参考升降器PWM调速等技术方案进行控制方案优化。该方案为增加把手控制器,把手控制器根据把手具体工作环境进行电压调整,主要采用PWM电波进行控制。采用PWM调速控制后,降噪效果明显,如图6所示。
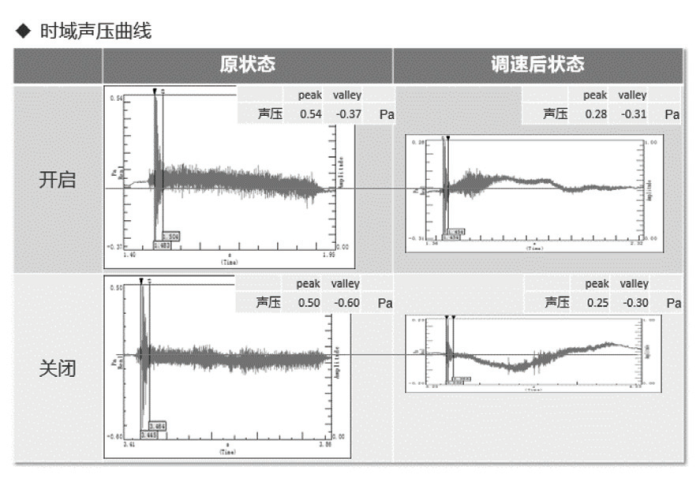
图 6 整改前后时域声压曲线对比
总结
本文结合某车型隐藏把手开发经验,介绍了智能隐藏把手结构设计、控制原理、布置安装设计以及安装工艺设计关注点,并结合部分典型问题对隐藏把手做了简要总结,对行业内隐藏把手开发工作提供了参考。
热点文章
-

智能汽车场景化开发:系统融合与 用户体验的协同研究
2026-07-20
-

“泰钽”来了!开启智能越野3.0时代
2026-07-22
-

基于传动效率的多模复合功率分流混合动力系统模式控制研究
2026-07-21
-

乘用车混合动力总成系统设计和性能仿真研究
2026-07-22
-

动力系统主导车市质变,增程器迈入系统竞争
2026-07-23
-

基于深度学习的电驱实验系统设计
2026-07-24
-

-
基于深度学习的电驱实验系统设计
针对传统永磁同步电机建模方法难以兼顾精度与实时性的问题,本文基于深度学习技术提出一种融合物理约束的永磁同步电机降阶模型,通过深度神经网络实现对电机非线性电磁特性的精细化建模。围绕所提降阶模型,搭建了电驱实验系统,并将该模型集成至电驱系统中,实现了实时硬件在环验证。在不同工况下对降阶模型和传统dq轴解析模型开展实验分析,结果表明,所提出的基于深度学习的永磁同步电机降阶模型在保证高精度建模的同时,实现了更好的动态性能。该模型支撑的实验系统可用于电驱系统的快速仿真与控制算法研究,具有良好的工程应用前景。
作者:
-
动力系统主导车市质变,增程器迈入系统竞争
-
“泰钽”来了!开启智能越野3.0时代
-
乘用车混合动力总成系统设计和性能仿真研究
-
基于传动效率的多模复合功率分流混合动力系统模式控制研究
-
智能汽车场景化开发:系统融合与 用户体验的协同研究





评论
加载更多