一文读懂自动驾驶地图建设模式
高精地图
高精地图HDMap在自动驾驶中属于令人又爱又恨的角色,近年来业内各方势力也围绕“是否使用HDMap“也展开了激烈的讨论。目前来看,包括Apollo、蔚来、理想、小鹏、Momenta在内的众多公司,都使用了语义地图(Semantic HDMap)。
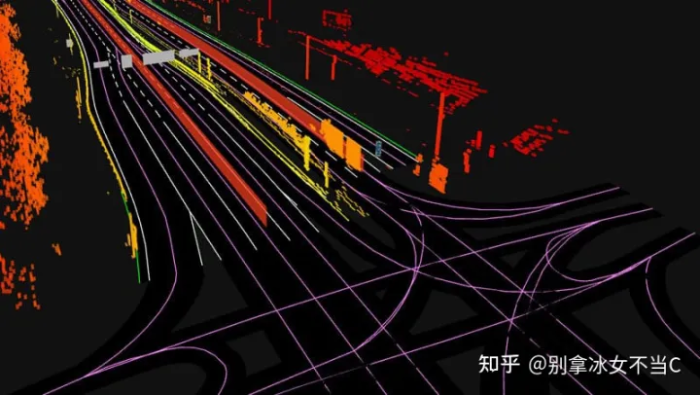
HDMap与普通的导航地图SDMap相比,精度更高,包含的信息更全。SDMap一般只能达到道路级精度,而且不会提供车道线、路面标志等具体坐标;而HDMap一般能达到分米级别精度,包含有准确的车道线、红绿灯、标志牌、路面箭头,甚至有些高精地图标出了车道线虚实属性变化点、车道线分叉点、合流点等。
HDMap
在自动驾驶中使用HDMap的优点显而易见:
开天眼:获得超视距感知能力,相当于开了上帝视角;
高精度:分米级别、甚至特定场景厘米级别的精度,能够给定位和规控模块
提供非常靠谱的先验信息,大大降低了算法难度,也降低了出事故的概率;
高丰富度:HDMap具有相当丰富的信息量,一般包括道路、车道、车道线、路面箭头、停止线、栅栏、交通标志牌、交通灯等要素,地图中包含以上地图要素的几何、属性、颜色、拓扑关系等,另外可能还会有车道变化点、道路曲率、道路坡度等。
其局限性同样很明显:
成本:高精地图图商通常采用价格昂贵的采集车建图,一个传感器可能就上百万,另外还有人工成本;除了建图过程,地图的传输和维护也需要一定成本;
覆盖度:中国很大,地球更大,HDMap不能像SDMap那样做到那么高的覆盖度。虽然高德等图商宣称已覆盖中国所有高速,但城区的覆盖依然是个大难题。随着自动驾驶的落地,应用场景逐渐从高速走进城区,在没有高精地图覆盖的路段只能抓瞎。这也是为什么很多公司在城区开放的自动驾驶都仅局限于一小段,例如上海的嘉定安亭、北京亦庄,因为只有这些路段有HDMap;
鲜度:道路上情况多变,尤其在中国,修路、摆锥桶是家常便饭,指望高精地图及时反馈这些变化是不太容易的。第一次建好了地图,后面怎么持续维护地图才是大难题。很多自动驾驶公司需要面临的一个实际问题是,当高精地图信息和感知信息不一致时,相信谁?怎么判断是高精地图没及时更新,还是感知出错了;
法规:地图是敏感信息,尤其是高精地图。在中国甚至SDMap都是要经过加偏的(国测局加偏,火星坐标系)。地图甲级资质国内目前就几家,而近年来国家也收紧了资质评审,能提供高精地图服务的图商不会太多。另外,中国是不允许售卖带有高度信息的地图的,这对六自由度的位姿估计是很不友好的。
国内能提供高精地图服务的,除了腾讯、高德、百度、四维图新、中海庭等大图商,还有宽凳、deep motion(已被小米收购)、觉非等体量小一些的图商。
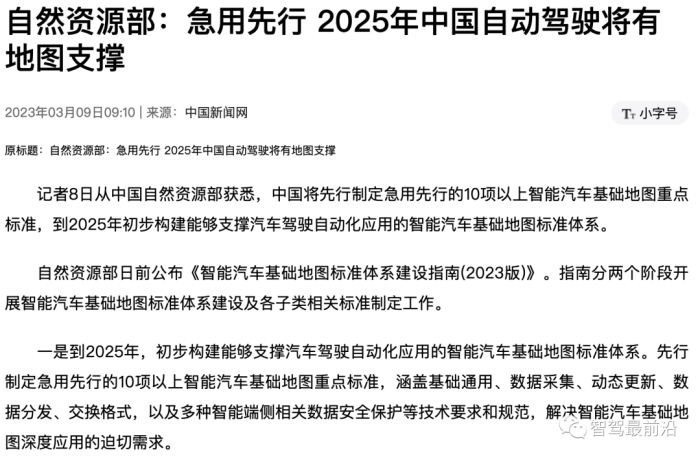
在法规方面,近期自然资源部放出了一些利好消息。
自然资源部-智能汽车基础地图标准体系建设指南(2023)
众包地图
以Mobileye的REM为先驱,国内外各自动驾驶公司也都在推进众包建图的路线:收集大量车流轨迹信息或单车SLAM建图结果,在云端融合为准确的语义地图,并用众包建图的结果更新、修补已有的HDMap。
众包建图的技术路线能在很大程度上弥补上述高精地图的缺点:不用维护成本昂贵的采集车,转而利用量产车上低成本自动驾驶设备,用数量弥补质量。
目前国内自动驾驶算法公司(Momenta)、新势力(蔚小理)、芯片公司(地平线)、图商(百度)等,均有众包建图的能力,甚至有些面向量产落地的众包建图团队的规模已经相当大。
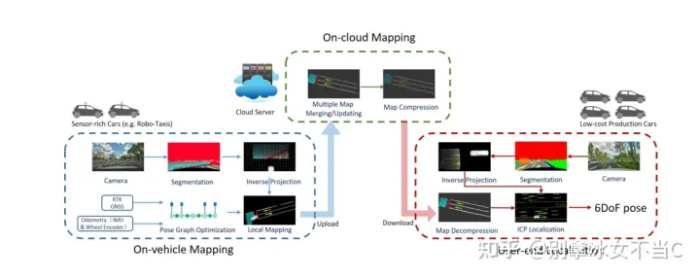
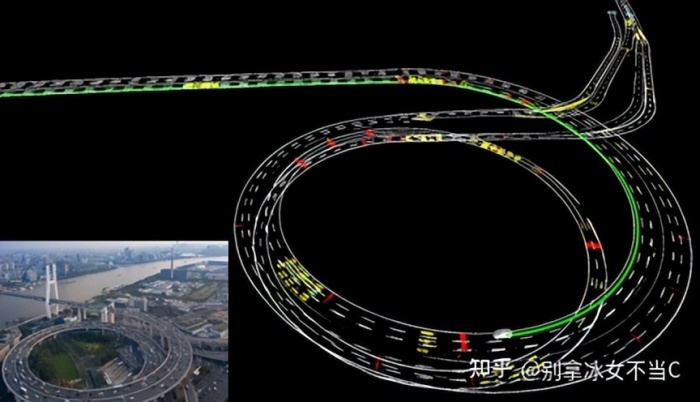
华为秦通组在ICRA2021发表的RoadMap比较有代表性:将多辆车单车局部建图的结果上传到云端进行融合、压缩,得到准确的轻量化语义地图,后续的车辆在线下载该地图,基于该地图进行6Dof定位。
华为众包方案RoadMap Pipeline
华为众包地图RoadMap
但众包地图方案也面临着几项很现实的挑战:数据安全、政策法规、用户隐私。
除此之外,众包建图在技术层面也面临着很多长尾case难以处理的困难。
导航地图
导航地图SDMap是目前最常见的地图形式,早已在我们的生活中普及多年,例如平时开车会用的百度地图、高德地图。
SDMap相比于HDMap的优点是:
建图和维护的成本低
发展成熟,覆盖区域广泛
在法规方面的阻力比HDMap小很多
但SDMap相比于HDMap的缺点也很关键:
精度低:通常只有道路级精度,达不到车道级精度,难以满足下游规划控制的需求
信息少:一般没有具体的车道线、路边沿的几何信息,也没有红绿灯、标志牌的准确位置信息,这些对定位和规划控制来说是较大的挑战。
之前也介绍了,在依赖的高精地图的自动驾驶方案受到法规、成本等因素的影响,推进受限时,主流玩家们纷纷将目光投向了SDMap,也就是接下来要说的轻地图方案
轻地图方案(SDMap+ / HDMap-)
对于量产自动驾驶来说,高精地图还是太“重”了。
往前数五年,包括小鹏、华为在内的很多玩家都基于高精地图跑通了高速路段和小部分城区路段,放出了漂亮的demo。但随着技术的演进和商业化步伐的加快,城市NOA的交付成了头部玩家们角逐的重点,曾经"真香"的高精地图却成为大规模量产落地的最大障碍。于是轻地图方案应运而生。
这里说应运而生其实不严谨,因为轻地图方案其实不是什么新东西,例如马斯克很早就明确表示特斯拉不用高精地图,原因还是上面说的覆盖度、鲜度、成本这些。(特斯拉只在标注环节用了高精地图,FSD实车运行只接入了导航地图)
轻地图方案指的是不用重量级的HDMap,而是基于轻量级的SDMap,或是基于处于HDMap和SDMap之间的地图形式,结合单车强大的感知能力,实现自动驾驶。
轻地图方案期望摆脱高精地图的枷锁,降低对地图的依赖程度,相应的对单车感知能力的要求也大大提高。也正是因为近年来视觉感知技术的进步,才使得“轻地图、重感知”的路线称为可能,而这其中Transformer和BEV方案功不可没。
其实直到今天,大多数玩家的主线项目普遍还是高度依赖高精地图的,毕竟没高精地图连Demo都很难做出来,没demo融不到钱公司都活不到轻地图这一天。即使有不少公司走众包地图的路线,严格意义上也还是高精地图,只是用众包的方式去生产地图而已。
2022年,在地图法规收紧,和感知能力增强的双重背景下,轻地图重感知路线又成为大家竞相追逐的香饽饽。
22年9月毫末在AI Day喊出"重感知,轻地图"的口号。小鹏在的XNGP也宣布不再依赖高精地图。23年3月元戎发布了不依赖高精地图的智能驾驶解决方案DeepRoute-Driver 3.0,从视频上看效果相当不错。理想23年的城市NOA也明确表明了不依赖高精地图理想掀起“上车潮”、重感知轻地图 2023年开启城市NOA元年理想23年的城市NOA也明确表明了不依赖高精地图。除此之外,蔚来、地平线等头部玩家内部也有相当的资源投入轻地图路线。
很多公司在宣传时讲的都是导航地图SDMap,但实际应用大概率还是会在SDMap的基础上添加一些HDMap中的重要信息,称之为SDMap+或HDMap-。单纯只用SDMap,对城市NOA来说还是不太现实的。
目前国内各公司在轻地图方案上也都还在探索阶段,也可以预测到会遇到重重困难,离量产落地还有一定距离,个人认为轻地图、重地图的争论还没有到盖棺定论的时候。23年年中到24年年初,是多家公司承诺的无HDMap城市NOA交付日期,我们拭目以待。
热点文章
-

智能汽车场景化开发:系统融合与 用户体验的协同研究
2026-07-20
-

“泰钽”来了!开启智能越野3.0时代
2026-07-22
-

基于传动效率的多模复合功率分流混合动力系统模式控制研究
2026-07-21
-

乘用车混合动力总成系统设计和性能仿真研究
2026-07-22
-

动力系统主导车市质变,增程器迈入系统竞争
2026-07-23
-

基于深度学习的电驱实验系统设计
2026-07-24
-

-
基于深度学习的电驱实验系统设计
针对传统永磁同步电机建模方法难以兼顾精度与实时性的问题,本文基于深度学习技术提出一种融合物理约束的永磁同步电机降阶模型,通过深度神经网络实现对电机非线性电磁特性的精细化建模。围绕所提降阶模型,搭建了电驱实验系统,并将该模型集成至电驱系统中,实现了实时硬件在环验证。在不同工况下对降阶模型和传统dq轴解析模型开展实验分析,结果表明,所提出的基于深度学习的永磁同步电机降阶模型在保证高精度建模的同时,实现了更好的动态性能。该模型支撑的实验系统可用于电驱系统的快速仿真与控制算法研究,具有良好的工程应用前景。
作者:
-
动力系统主导车市质变,增程器迈入系统竞争
-
“泰钽”来了!开启智能越野3.0时代
-
乘用车混合动力总成系统设计和性能仿真研究
-
基于传动效率的多模复合功率分流混合动力系统模式控制研究
-
智能汽车场景化开发:系统融合与 用户体验的协同研究





评论
加载更多