基于DIL的线控转向系统安全设计
0 前言
SbW是转向系统的一种形式,它取消了作为机械连接的中间轴,通过线束传递电信号的方式使HWA和车轮转向执行器(RWA)实现联动,赋予了底盘域更灵活的传动比和手感的变动能力。与传统的转向系统相比,SbW实现了HWA和RWA的解耦。而这部分的差异,给SbW提出了更高的安全以及可靠性要求。为了降低电子电气系统故障或错误引发的非预期风险,根据强制标准GB19765-2005的要求,SbW的设计和开发须根据功能安全GB/T34590-2017,从系统、硬件和软件各层面逐一分析并设计安全机制,使得线控系统在故障发生情况下,能够仍然可控且可合理降级进入设定的安全状态,同时还需对这些安全机制进行大量测试和可靠性评判。
1 相关研究现状
李赛赛等提出了对转向系统安全机制在实车上进行单点故障注入,并通过整车反应、车辆轨迹和方向盘手力矩进行功能安全主观评价。高乐、蒯家琛等提出了通过硬件在环(HiL)测试方法给电动助力转向系统(EPS)硬件进行了扭矩传感器和电机电流故障注入。李傲寒阐述利用dSPACE工具搭建了HiL系统台架对设计的硬件冗余和软件故障检测等安全机制进行故障注入和故障容错确认测试。由此可见,安全机制设计后需要进行故障注入系统可靠性测试,测试方法主要有两种:实车和EPS电子电气系统HiL。实车可控性测试针对低成熟度模块有较高的风险,不定因素干扰过大(人为操控多变、路况因素不可控),无法对安全机制进行可重复工况的客观评判。而EPS电子电气系统HiL只能针对子系统进行验证,对于整体系统联动工况及驾驶环境下的可控性方面的评判有较大的局限。
因此,基于半实物仿真的DIL,融合了实车及HiL的优点形成的半实物“人—车—环境”闭环系统,在各种可重复且可编辑的不同场景工况下,可以在自动注入故障后,实时记录SbW的响应以及车辆观测值,实现安全机制客观验证与高效迭代。
2 线控转向的安全分析
2.1 SbW的安全目标
SbW可划分为HWA和RWA两个子系统,每个子系统由若干相关项构成。如图1所示,显示了“人—车—环境”闭环中各相关项之间方向明确的数据传递,其中:1表示驾驶员通过转向盘向驾驶员意图感知单元输入的基础信号(包括:角度、角速度和手力等);2表示反馈力矩执行单元向转向盘传递的手感力矩;3表示HWA通过信号处理控制单元传递给RWA的目标转角值;4表示RWA反馈测量数据给HWA用于计算手感;5表示SbW通过齿条、横拉杆和转向节等连接机构,传递给转向车轮的转向角;6表示车载供电系统给SbW的供电。7表示车载通信数据;8表示车载报警数据;9表示传递给驾驶员的可视化或声音报警;10表示转向车轮与环境间(如地面等)交互的物理数据(力、力矩等)。
以上相关项和数据传递表明了SbW系统的核心功能,即执行HWA转角输入和反馈RWA力矩。基于危害分析和风险评估(HARA)分析,可以得出SbW的异常表现并推导出最基本的安全目标,如表1所示。
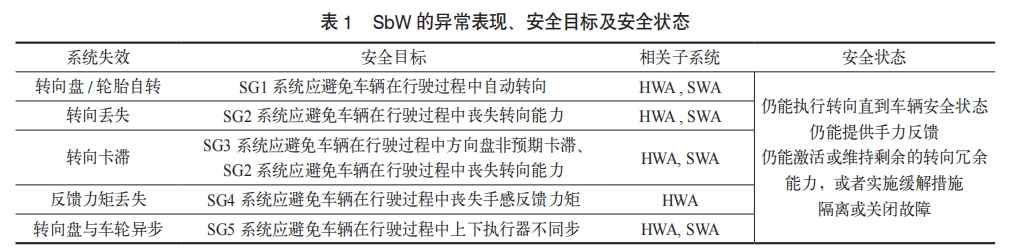
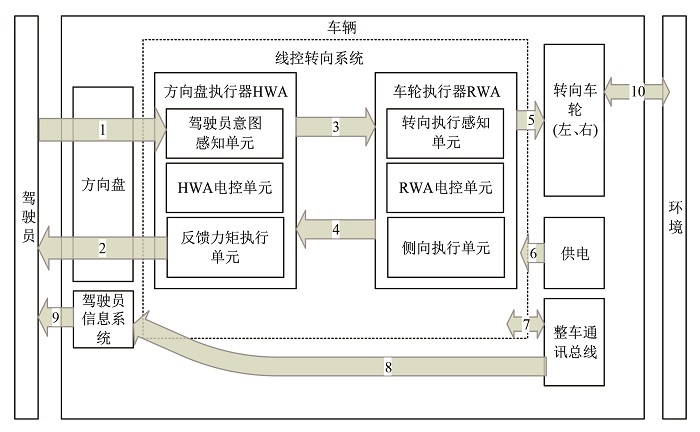
图1 SbW的系统示意
2.2 基于SbW系统架构的故障分析
基于以上异常表现,可依据SbW系统架构进一步细分故障源,并推导其可能发生的故障形式。如图2所示,为由物理模块构成的系统架构示例,包括电控单元、执行电机、扭矩角度传感器、蜗杆小总成、机械限位组和机械连接组件等。其中,电控单元又由多个模块构成,模块间传递信号包括驱动电机的PWM,芯片间通信的I2C、IPC等。
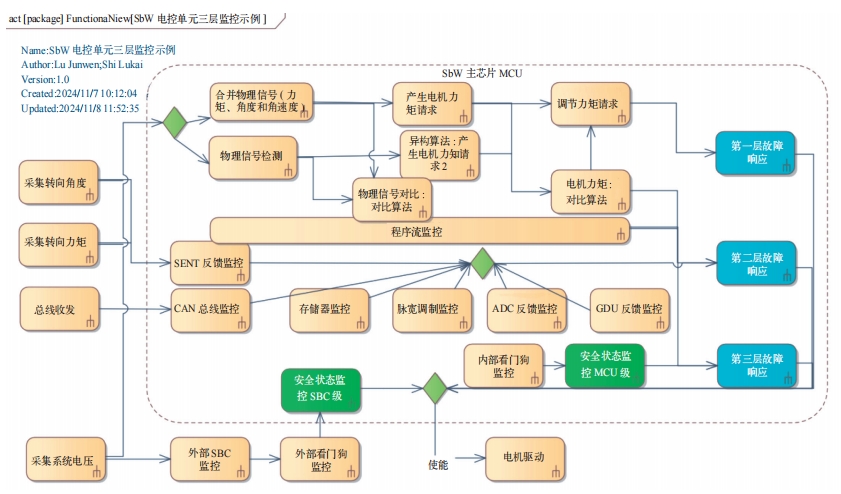
图2 基于三层监控的HWA软件架构示意
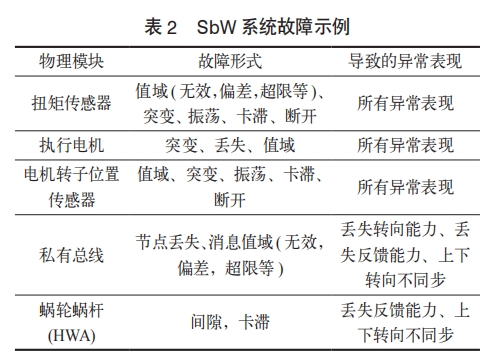
结合系统架构和表1中的异常表现,罗列了如表2所示的部分物理模块故障形式所对应的异常表现。
2.3 SbW系统安全机制的设计
SbW由上下两个子系统组成,其安全机制也包含单个子系统本身和多子系统协同工作。其中,对于子系统本身的安全设计目的在于:(1)尽可能把单点失效转换为多点失效;(2)有监控和提示机制确保潜伏失效。因此,基于三层监控框架概念可以初步确定带有安全机制的子系统架构。如图2所示,其中不限于软件算法的异构、硬件模块检测、问答监控和锁步核等措施。另外,系统的机械模块的可靠性也需要考虑在安全设计中,以避免机械组件的损伤导致系统失稳而违背安全目标。
对于协同工作的安全机制,主要考虑某电控子系统失效,另外子系统如何确保整体进入安全状态。例如HWA非预期自转向情况下,SWA的转向角度直接切换来自实车总线请求等。
3 线控转向安全机制确认
为了验证当故障发生后,系统内的安全机制是否能有效地进行处理,基于故障注入的降级及可控性验证是常用方法之一。SbW的故障注入验证主要考虑故障的覆盖程度、故障注入的运行工况和安全机制的判定标准。
3.1 SbW的故障注入等效法则
SbW的硬件元件数量繁多,每个元件又有较多的故障类型,例如仅电阻一项就可能有短路、断路以及温漂等故障。软件层面如校验错误、接收/发送失败和赋值偏差等故障,均可影响许多模块。因此,系统层面的验证按照单个元件或功能的每个故障进行注入并不现实。
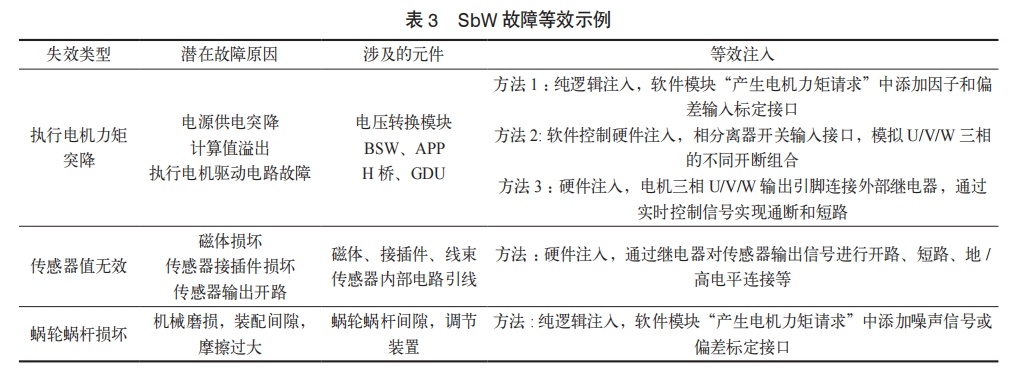
基于系统架构分析不难发现许多故障在系统层级的表现近似甚至相同,因此,可将发生相同失效的故障归纳为失效等价类(FEC),每一种失效等价类可以用一种或两种效率高且复现性高的方式来代替,并赋予阶跃突变、振荡和卡滞这三种故障特性来模拟极端状况。本文是通过软件注入算法或基于继电器的硬件注入方式来实现故障全覆盖,如表3所示。
3.2 SbW安全机制验证场景设计
考虑到SbW的验证场景无约束性,为了实现有限的验证场景,则依据发生概率选取最恶劣的场景。场景一般包括操控参数和工况。场景暴露概率是操控参数选取的主要依据。SbW的操控参数使用曝光概率等级E2~E4,如表4所示。

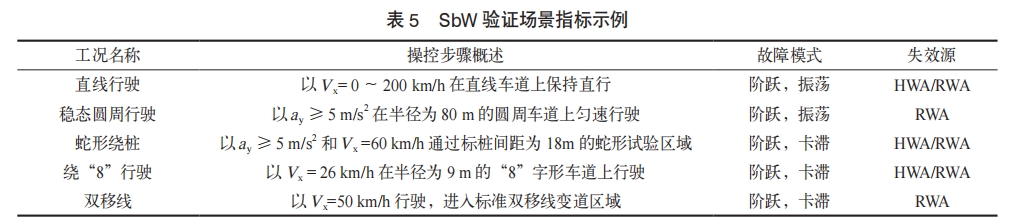
类似地,基于车辆横向运动验证要求,SbW的验证场景可以选取极限工况,例如蛇形绕桩、绕“8”行驶等。
结合操控参数和工况,可以形成数量有限且覆盖全面的SbW验证场景,如表5所示为例。
3.3 SbW安全机制可控性客观判定机制的建立
SbW安全机制通过可控性进行评判。可控性参数指标包括但不限于车辆质心横向位移、车辆质心侧向加速度、车辆质心的横摆角速度以及转向操控力等。
测试要求在不通知驾驶员的情况下,进行故障注入,并且记录参数指标并观察车辆是否仍然能按照横向轨迹要求行驶。主要步骤有如下:
(1)没有故障,并在给定运行场景,记录正常系统表现和数据。
(2)关闭或规避安全机制,在相同运行场景下,基于可控性C0~C1的要求确定故障持续时间以及故障的特性值边界,例如手感模拟力阶跃跳变的最大幅值差,转向卡滞时间长度等。
(3)开启安全机制,在相同运行场景下,注入(2)确定的故障,并记录数据。
(4)结合(1)~(3)物理参数变化以及驾驶人主观感受,判定是否可控。
4 基于DIL的SbW安全设计
低成熟度产品的安全机制设计与验证是设计开发中的重点,开发阶段越是后期,考虑的安全机制越全面,相应测试条件也越严苛。因此,基于半实物仿真的测试方法孕育而生。相较于实车验证受到安全、条件等方面的局限,半实物仿真的测试参数更易调校,且故障注入精度更高,形式更多元,这将大大减少验证安全机制的时间。
4.1 SbW的DIL系统基本架构
DIL是把真实的SbW、车辆及其运行环境仿真模型和驾驶员联系在一起,如图3所示。
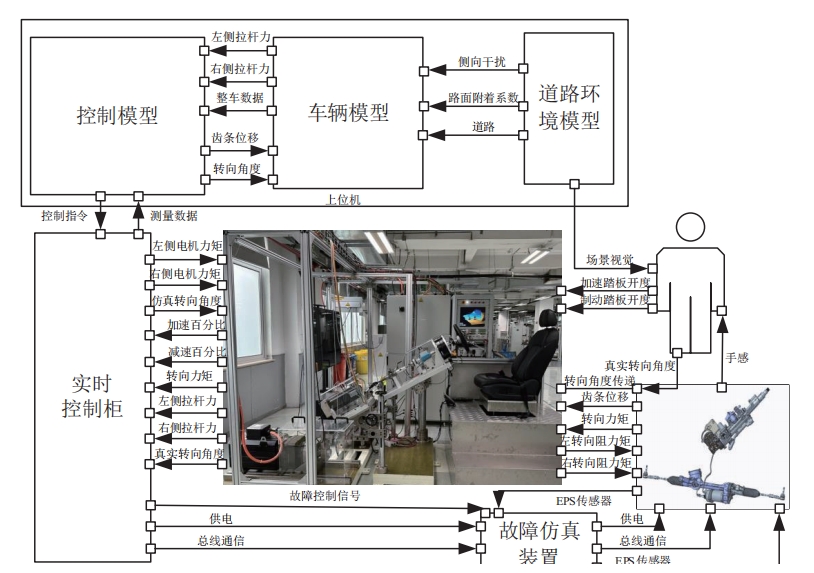
图3 DIL实时系统机电耦合集成示意
DIL由转向盘输入装置、车轮转向负载模拟电机、转向节模拟器、转向系统硬点调节机构、控制柜及上位机组成。转向盘输入切换装置由带有离合器的空心轴电机组成,可以提供角度或扭矩输入自动转向或/和驾驶人控制模式。装有角度传感器和扭矩传感器的转向盘输入装置采集输出角度和力矩并提供给实时系统,拉杆负载电机配合转向节模拟器在横拉杆端动态施加齿条力或位移载荷,横拉杆端的力传感器及位移传感器实时采集拉杆力和拉杆位移。
DIL系统中,HWA的上管柱与转向盘输入装置相连,用来实现人或转向电机的转向运动输入。车轮执行器(SRA)的拉杆外球头和转向节模拟器相连,并由左右负载电机传递力。HWA和SRA的供电接口与控制柜的可编程电源相连接,总线接口与上位机的实时总线通道相连并与模拟车辆节点进行交互。转向盘转向模拟电机、车轮转向负载模拟电机、可编程电源以及车辆模拟总线节点都由上位机基于仿真模型实时并行控制。
4.2 DIL系统的故障注入模拟机制
根据等效故障的概念,DIL主要是从硬件和软件两个方面对SbW实现故障注入。硬件故障注入主要针对SbW系统接口的物理故障,包括传感器接口、供电接口、总线接口和机械连接等。该单元在信号传输完整通路之中添加单个串联继电器和若干并联继电器,控制继电器的通断实现信号的短路和断路。
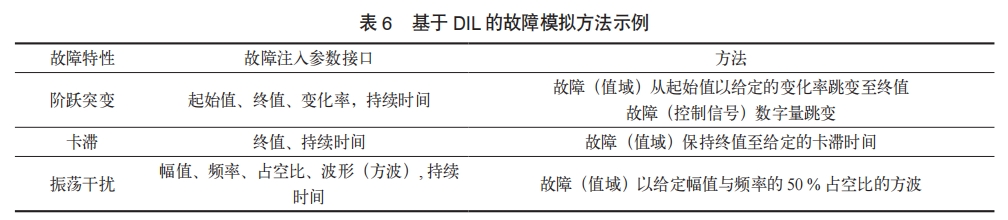
软件故障注入主要通过逻辑信号变化来仿真SbW系统失效表现,包括SbW的主动电机输出力矩请求、电机转子传感器输出、硬件信号故障和机械零部件失效物理信号故障等。其工作方式是根据硬件软件接口(HSI)进行逻辑信号阻拦或直接篡改等实现系统失效,故障特性如表6所示。
4.3 基于DIL的SbW故障自学习自动注入
基于实车的安全机制可控性验证存在较大的不确定因素,例如外界干扰、操控误差以及人为的随机性等。然而在DIL系统中,可以解决以上问题,使得不确定因素足够减少。其原理是根据可控性试验标准指标要求,针对当前的操控场景进行操控参数监控,一旦符合条件即触发故障注入,如图4所示。因此,由于试验标准一致,即使人为或全自动操控各不同,但仍能实现故障注入场景的一致性且可重复。例如指标要求中转向盘转角达到90˚后5s且车速保持为200km/h,DIL系统可以根据虚拟驾驶场景中的操控参数,例如:车速稳定值、转向角度稳定值和持续时间等进行判断。
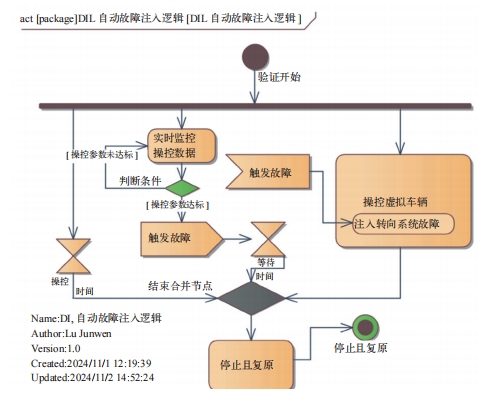
图4 基于DIL故障自学习注入逻辑图
5 DIL自转安全机制验证
结合表1和表5,针对安全目标“SG1系统应避免车辆在行驶过程中自动转向”,以HWA非预期转向为例,对其的安全机制进行分析和研究。
HWA由于手感电机的力矩突变,导致发生非预期的自转向,此时,需要确保故障可以被正确隔离,以及系统降级并能使车辆达到安全状态过程中SbW仍然保持可控。
本文分别对直行和稳态绕圆场景工况,驾驶员在DIL中根据虚拟场景进行操控,故障自学习注入机制判断当前的虚拟车辆数据根据给定的条件进行自动触发且驾驶员不可预测。相同工况下对开启安全机制和关闭安全机制的产品进行两次观测,可控性观测数据如图5和图6所示。
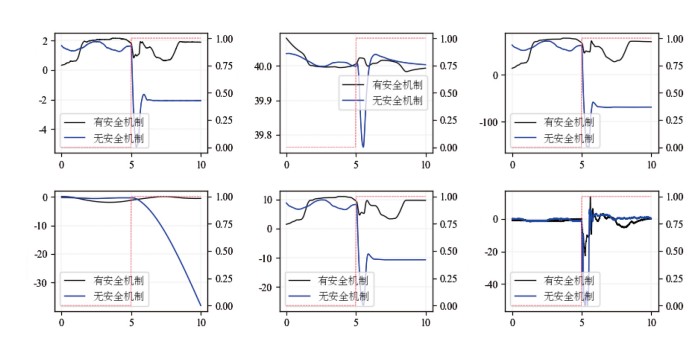
图5 直行工况下故障注入前后数据对比
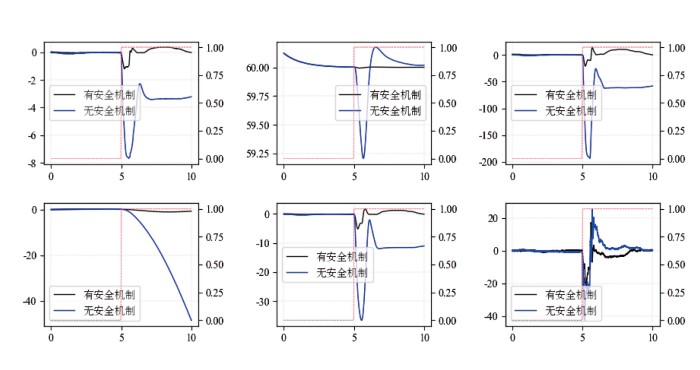
图6 稳态绕圆工况下故障注入前后数据对比
在虚拟环境下,选取故障注入瞬间时刻,车辆相对车道的偏移情况如图7和图8所示。相同驾驶员的驾驶习惯下,在无安全机制的系统在力矩特性在4N·m处HWA非预期自转使得车辆驶出车道,相同的故障和力矩特性下。在添加了安全机制后,即使HWA非预期自转,但车辆有较轻微的影响但立即切换总线数据使得车辆仍然可以保持在车道内。
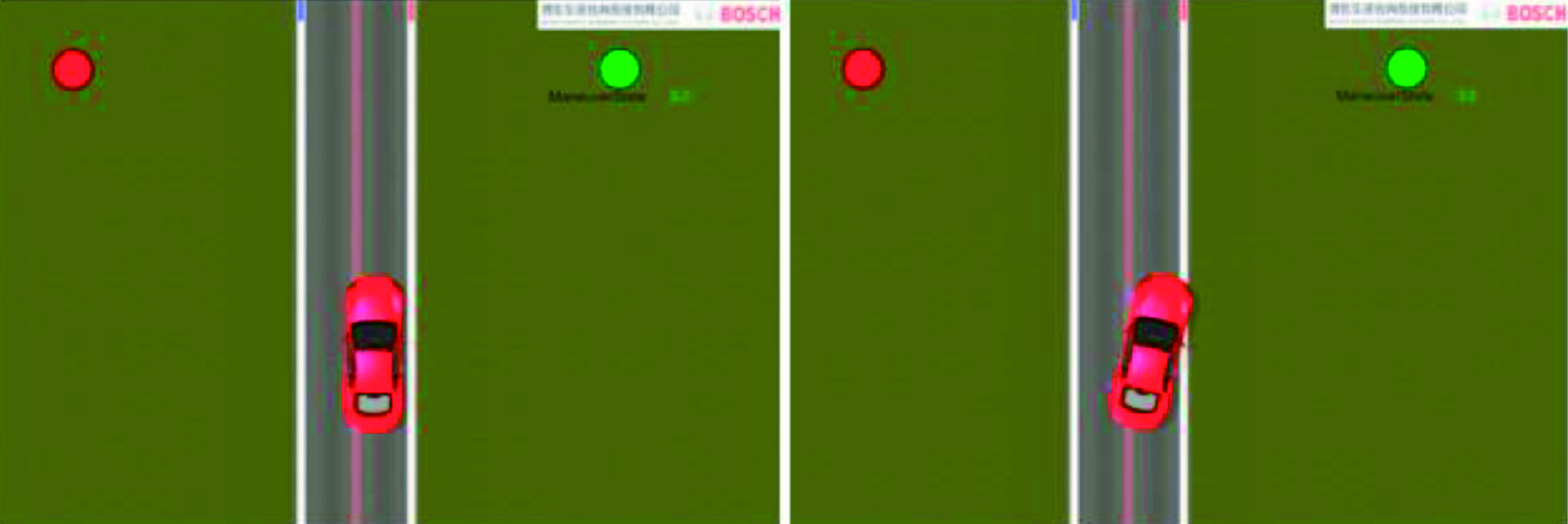
图7 直线工况下有无安全机制车道偏移对比

图8 稳态绕圆工况下有无安全机制车道偏移对比
6 结语
本文阐述了SbW从安全目标分析到安全机制设计和验证的过程,主要基于系统架构对可能存在的故障以及如何监控和消除该故障进行梳理,通过等效分析对故障和工况进行了有效区间的筛选,并在作者开发的硬件在环DIL系统上,在开发过程中,对低成熟度的安全机制进行确认和优化。另外,DIL不再只局限于系统合格性测试,还能在系统及安全设计和开发阶段,实现基于测试结果的产品开发。DIL还能实现重复性高的故障自动化注入以及虚拟场景和可控标准的多元化开发,对“可控性”评价带来更客观的判断依据。
虚拟工况的真实性以及实车六自由度感受是DIL的一大难点,当前的研究在和不同车型实际数据对标仍在进行中,未来将会把实车六自由度进行解耦,并且使SbW的安全机制判定维度更加丰富。
参考文献
[1] 《中国公路学报》编辑部 . 中国汽车工程学术研 究综述 · 2023[R]. 中国公路学报 , 2023,36(11): 1-192.
[2] 李赛赛 , 梁东 , 郭瑞玲 , 等 . 乘用车转向功能 安全主客观测试评价方法 [J]. 汽车实用技术 , 2023.019.029: 149-155.
[3] 高乐 , 刘秋铮 , 陈慧 . EPS 系统功能安全测试方法 [J]. 电子技术与软件工程 , 2020,06: 28-30.
[4] 蒯家琛 , 王玮 , 温敏 , 等 . 基于硬件在环的 EPS 系统 故障诊断及自动化测试 [J]. 北京汽车 , 2021,04: 44-47.
[5] 李傲寒 . 基于 ISO26262 的乘用车线控转向系统功 能安全研究 [D]. 长春 : 吉林大学 , 2024.
[6] D IN 70065. R o a d Ve hi cl e -R e q ui r em e nt s f o ra“Steer-by-Wire(SbW)-System[S]. 2024.
[7] E-Gas Monitoring Concept for Gasoline and Diesel Engine Control Units[S]. 2015.
[8] I S O 15037-1-2019 R o a d Ve hi cl e s - Ve hi cl e s dynamics test methods Part 1:General conditions for passenger cars[S]. 2019.
[9] ISO 4138-2021 Passenge r ca rs - Steady -state ci rc ula r d ri vi n g be ha vi o r - O pe n -l o o p te st methods[S]. 2021.
[10] 国家市场监督管理总局 , 中国国家标准化管理委 员会 . 乘用车紧急变线试验车道第 1 部分 : 双移 线 GB/T 40521.1-2021[S].2021.
[11] 中华人民共和国国家质量监督检验检疫总局 , 中 国国家标准化管理委员会 . 汽车直线行驶稳定性 试验方法 GB/T 41600-2022 [S]. 2022.
[12] 陆俊文 , 等 . 一种多功能汽车转向系统在环测试 试验台 : ZL202223208540.8[P], 2023-06-16.
[13] 高立臣 , 等 . 一种手自一体的转向输入装置 : ZL202322789716.1[P], 2024-05-17.
本文为“AI汽车制造业”首发,未经授权不得转载。版权所有,转载请联系小编授权(VOGEL100)。本文作者:陆俊文 施陆锴 高立臣,单位:博世华域转向系统有限公司 。责任编辑龚淑娟,责任校对何发。本文转载请注明来源:AI汽车制造业
AI汽车制造业
龚淑娟
李峥
相关推荐
-

一文读懂!新能源汽车充电口标准那些事儿
“在新能源汽车日益普及的当下,充电问题成为了众多车主关注的焦点。而充电口标准,看似不起眼,实则在新能源汽车的使用便利性、产业发展等方面起着至关重要的作用。今天,咱们就来深入聊聊新能源汽车充电口标准的那些事儿。
2025-03-10
-

2025年人形机器人产业深度解析
如果2024年是人形机器人原型机元年,那么2025年就是量产元年,那2026年,则有望是商业化爆发的元年,2024年特斯拉、1X、FigureAI (open AI 旗下)为首的多家科技明星公司及无数初创团队犹如璀璨星辰,纷纷切入人形机器人的浪潮中:2024年4月波士顿动力发布电动版人形机器人进入atlas,2024年5月宇树正式发布人形机器人G1,定价9.9万起,2024年8月31日,1XTech发布双足人形机器人NEO,同年10月18号,开普勒发布先行者 K2。
2025-03-12
-

一文看懂电动汽车 DC/DC
在电动汽车的复杂体系中,DC/DC转换器虽小,却扮演着举足轻重的角色。它如同电动汽车的“能量枢纽”,默默维系着各系统的稳定运行。你是否好奇,DC/DC究竟如何运作?它对电动汽车性能有哪些关键影响?接下来,就为你开启电动汽车DC/DC知识的全面汇总之旅。
2025-03-07



热点文章
-

-

面向智能网联汽车C-V2X短程通信的加密算法研究
2026-07-06
-

企业海外建厂的全球合规准则
2026-07-06
-

智能网联汽车轨迹优化方法研究综述
2026-07-07
-

中国企业出海中的人才战略与文化融合
2026-07-07
-

面向ISO 34505的自动驾驶场景评价及测试优先级分析
2026-07-13
-

圆满闭幕丨上海国际具身智能产业博览会(CIEI 2026)完美收官,2027再相见!
2026-07-06
-
面向ISO 34505的自动驾驶场景评价及测试优先级分析
为解决自动驾驶测试场景繁杂、测试资源有限、风险覆盖不均及传统权重主观性强的问题,依托ISO 34505:2025标准,基于危险度、复杂度和暴露度三个评价维度,构建汽车安全完整性等级(Automotive Safety Integrity Level,ASIL)-设计运行域(Operational Design Domain,ODD)动态权重模型,优化测试优先级量化评价体系。经L3级自动驾驶仿真与实车试验验证,该方法可精准划分测试等级,提升测试效率与高风险场景覆盖率,可为自动驾驶功能安全及预期功能安全验证提供工程借鉴,助力ISO 34505工程落地。
作者:
-
国产化替代正当时:永铭车规级固液混合电容,为激光雷达发射端与算力核心提供高纹波耐受解决方案
-
智能网联汽车轨迹优化方法研究综述
-
AI《汽车制造业》增刊
-
中国企业出海中的人才战略与文化融合
-
面向智能网联汽车C-V2X短程通信的加密算法研究





评论
加载更多