新能源 P4 架构两档减速器优化策略
随着新能源汽车迅猛发展,不同功率、不同转速范畴的驱动电机也得到了广泛的应用,受限于电机的转速范畴和电机的效率区间,为了得到更高的车速和电驱系统效率,在较高配置的电动汽车上,两档减速器也逐渐开始被大量使用。
同传统燃油车的变速器不同,两档减速器只有N位、1位和2位三个档位,两个传动比,可以实现全车速范围换档,起步的大扭矩输出,使整车运行在电机的高效率区间转速,从而优化整车的动力性。
优化策略
两档减速器的换档大体可以分为三步,第一步就是摘档,第二步是电机同步转速,第三步是进档。第二步转速同步是ACU请求P4M进入速度控制模式,ACU通过轮速计算出P4M的目标转速,P4M依据目标转速进行调速,达到ACU的目标转速后,退出转速模式。ACU的目标转速计算是采用ESP发来的轮速,通过当前规格的轮胎滚动半径和传动比,换算成P4M输出轴的转速的过程。
不同的轮胎规格成为ACU进行换档的整车限制条件。为了既能够实现整车的正常换档,同时又能够尽可能地简化软件版本,实现平台化,制定了一种全新的两档减速器换档控制器换档时计算P4M目标转速的计算方案。
策略实施
1. 滚动半径计算
ACU可以通过接收到ESP发送左右轮的轮速和脉冲信号分别为RLWheelSpd、WssRLEdgesSum和RRWheelSpd、WssRREdgesSum,可通过如下公式进行当前车型所搭载轮胎规格的滚动半径:
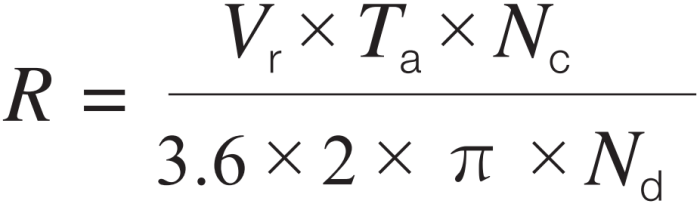
式中,R为轮胎的滚动半径;Vr为当前轮的轮速;Ta为对应脉冲差的时间;Nc为轮胎转动一圈的脉冲数;Nd为脉冲差值。
通过该公式可以计算出当前轮的滚动半径,再计算另一侧轮胎的滚动半径,再将通过两个轮速算出的两个滚动半径取算术平均值。
2. 滚动半径校验与存储
通过计算出的滚动半径分别计算左后和右后的轮速,并与ESP发出的左后和右后轮速进行对比,当达到允许的误差范围内时,记录下此时的滚动半径。当整车下电时,ACU将记录的滚动半径值存进EEPROM。
3. 策略流程
图当整车车速达到换档线后,可按正常换档流程进行摘档,而ACU发出的P4M的目标转速可以通过计算出的滚动半径进行计算,当P4M调速到达目标转速的±50r/min后,ACU完成进档,详细流程如图所示。
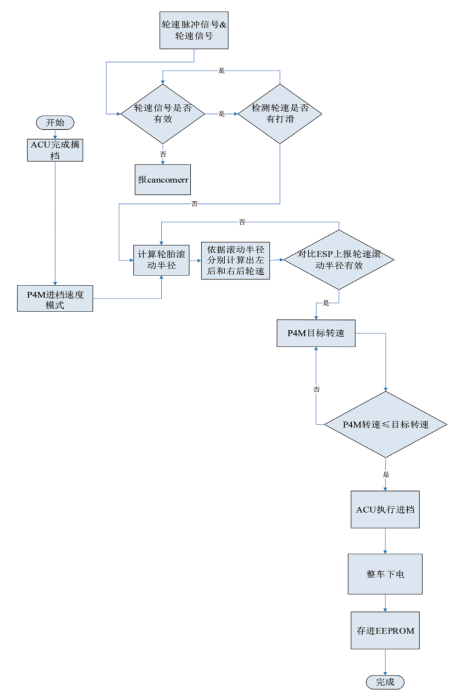
滚动半径计算逻辑流程
总结
1)通过同步环同步实现换档的P4架构两档减速器,为了更好地将P4架构的两档减速器的电驱系统平台化,应用于搭载不同轮胎规格的车型,在整车下线后,通过换档控制器在软件上通过在1档时传动比的轮速换算,计算出轮胎的滚动半径,作为动态换档时计算目标转速的滚动半径,当换至2档成功后,通过对2档时传动比进行换算校验,当满足一定值(标定量)范围内时,认为该滚动半径有效,且存进EEPROM中。该策略可以省掉整车下线时的配置字刷写步骤,加快生产节拍。
2)整个策略实施过程,策略存储过程,完全可以在整车上下电过程中完成,无需单独的EOL流程及轮胎规格方面的配置字刷写流程,缩短EOL流程时间,所以整个过程降低生产成本,增加产线效率,没有外界设备,且故障率低。
3)在整车开发阶段,如果ESP上报的轮速不是按整车轮胎规格的话,ACU的目标转速计算就会与实际转速有偏差,从而造成进档失败,且该故障无法从ACU或P4M正常报出DTC,导致故障排查困难。该方案利用ESP上报的整车轮速和轮速脉冲信号计算出滚动半径,从而较为准确地计算出同步时目标转速,完成换档。
热点文章
-

智能汽车场景化开发:系统融合与 用户体验的协同研究
2026-07-20
-

“泰钽”来了!开启智能越野3.0时代
2026-07-22
-

基于传动效率的多模复合功率分流混合动力系统模式控制研究
2026-07-21
-

乘用车混合动力总成系统设计和性能仿真研究
2026-07-22
-

动力系统主导车市质变,增程器迈入系统竞争
2026-07-23
-

基于深度学习的电驱实验系统设计
2026-07-24
-

-
基于深度学习的电驱实验系统设计
针对传统永磁同步电机建模方法难以兼顾精度与实时性的问题,本文基于深度学习技术提出一种融合物理约束的永磁同步电机降阶模型,通过深度神经网络实现对电机非线性电磁特性的精细化建模。围绕所提降阶模型,搭建了电驱实验系统,并将该模型集成至电驱系统中,实现了实时硬件在环验证。在不同工况下对降阶模型和传统dq轴解析模型开展实验分析,结果表明,所提出的基于深度学习的永磁同步电机降阶模型在保证高精度建模的同时,实现了更好的动态性能。该模型支撑的实验系统可用于电驱系统的快速仿真与控制算法研究,具有良好的工程应用前景。
作者:
-
动力系统主导车市质变,增程器迈入系统竞争
-
“泰钽”来了!开启智能越野3.0时代
-
乘用车混合动力总成系统设计和性能仿真研究
-
基于传动效率的多模复合功率分流混合动力系统模式控制研究
-
智能汽车场景化开发:系统融合与 用户体验的协同研究





评论
加载更多