智能汽车的助推器——CAN FD
汽车电子的发展经历了几个阶段。第一个阶段是1974年之前,交流发电机、电压调节器等技术起点较低的电器开始大规模应用。第二个阶段是1974~1982年,以集成电路和16位以下的微处理器在汽车上的应用为标志。第三个阶段是1982~1990年,微电脑在汽车上的应用日趋可靠和成熟,并向智能化方向发展。也正是在第三个阶段,德国Bosch公司推出了新型的串行总线——CAN控制器局域网,此后,汽车电子的发展迎来了新时代。
CAN:Controller Area Network,即控制器局域网络。CAN总线采用双线串行通讯协议,基于非破坏性仲裁技术,分布式实时控制。可靠的错误处理和检测机制使CAN总线有很高的安全性,目前已经成为汽车计算机控制系统和嵌入式工业控制局域网的标准总线。基于CAN总线,车载控制器可以实现信号交互,从而共享整车实时的信息。
随着汽车高级驾驶辅助系统和人机交互的增加,人们对车载控制器数据传输性能的需求越来越高,传统的CAN总线由于带宽的限制,在迅速发展的车载控制器面前逐渐显得力不从心。
然而,CAN总线毕竟已经在汽车上有了数十年成熟应用的经验,FlexRay、Ethernet等后起之秀受限于成本和技术难度等因素,也无法迅速取而代之。为了跳出带宽的限制,满足日渐增加的需求,改进版的CAN总线——CAN FD应运而生。
CAN FD(CAN with Flexible Data rate)数据传输效率大幅提升,而且继承了CAN总线的主要特性,软件容易开发和移植,并保持了低成本的优势以应对新型总线的挑战。
相比“传统”的CAN协议,CAN FD具有两大特点:可变速率和大数据场。
可变速率
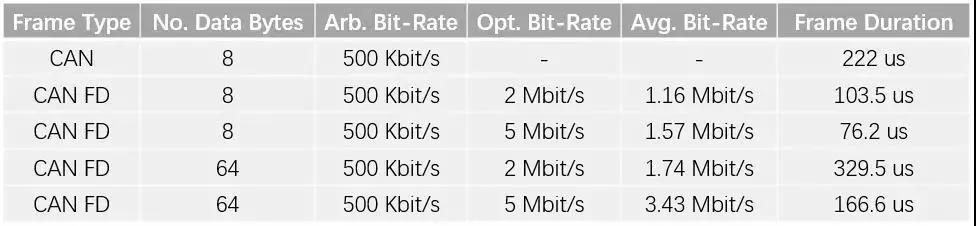
CAN FD名称中的FD(Flexible Data rate)指的就是可变速率,传统CAN通信的最大速率为1Mbps,车载领域实际使用速率最高为500kbps,而CAN FD将通信速率提升到了5Mbps。需要指出的是,“可变速率”的含义并不是指帧与帧的传输速度不同,而是指同一帧里不同部分的传输速度不同。
观察CAN FD的数据帧结构:
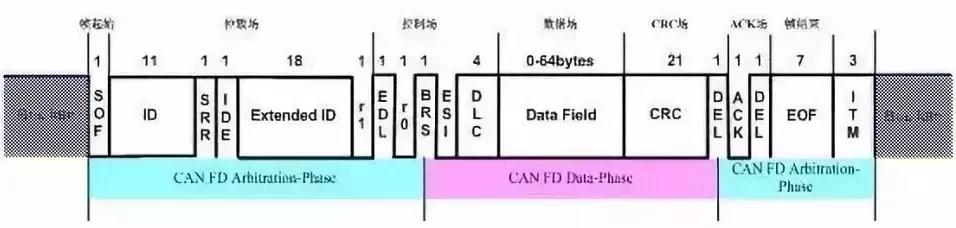
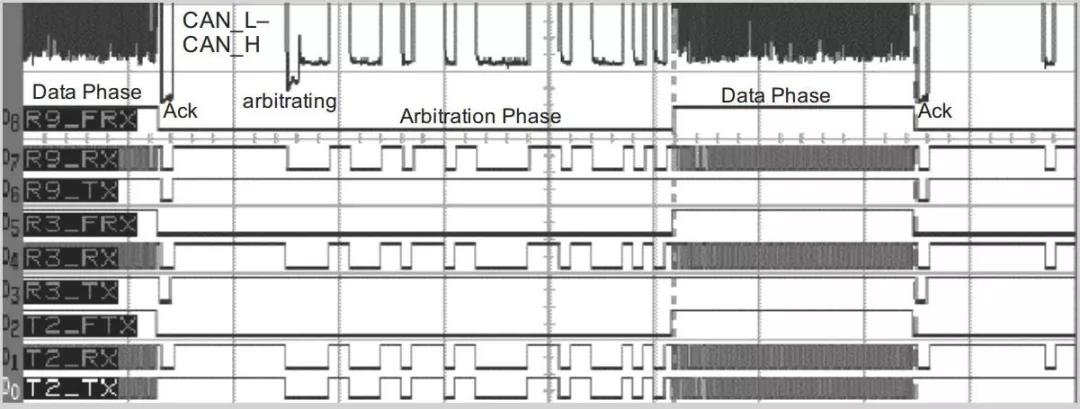
CAN FD报文通信时,在仲裁段和紧接着的数据控制段仍使用传统的500kbps波特率,当来到数据段时,CAN-FD总线就会切换到更高的通信波特率。从而减少数据帧发送耗时,提高CAN-FD的整体传输速度。在单位时间内,可以有更多的数据进行交互。
或许你会有疑问,为什么不把整个数据帧的传输速度都提高呢?
这就涉及到CAN通信的基本原理:CAN采用仲裁机制来判定不同节点CAN报文传输的优先级,每个节点在发送的同时监测总线状态,判断自己是否仲裁成功。在仲裁期同一总线上的所有节点发出的信号必须在一个位的时间内到达,以便互相判断优先级;而电信号传播速度是有限的,通信波特率越高,位时间内通信距离越短。综上,500kbps是从大量经验中得出的一个适用于车载网络的传输速率。
如果贸然提高仲裁段和数据控制段的通信速率,则各节点监测到的总线状态不能在同一个位的时间内同步变化,仲裁机制便会失效。
而在数据段,网络上仅有一个节点发送数据,其他节点处于接收状态,各节点之间不需要协调同步问题,此时提高传输速度,对发送方和接收方都是比较容易处理的。
大数据场
无论是CAN还是CAN FD,每个数据帧的仲裁段消耗的发送时间是固定的。对于同一段有效数据,发送这些数据所用的帧越少,则仲裁段消耗的总时间越少,传输效率也就越高。
传统的CAN协议,每个数据帧里最多只能包含8个字节的有效数据,而CAN-FD对数据场的长度作了很大的扩充,在每个数据帧里最多可发送64字节。提高数据传输效率的同时避免了经常发生的数据分裂状况。基于大数据场,控制器节点的信号可以集中到两至三帧报文中。
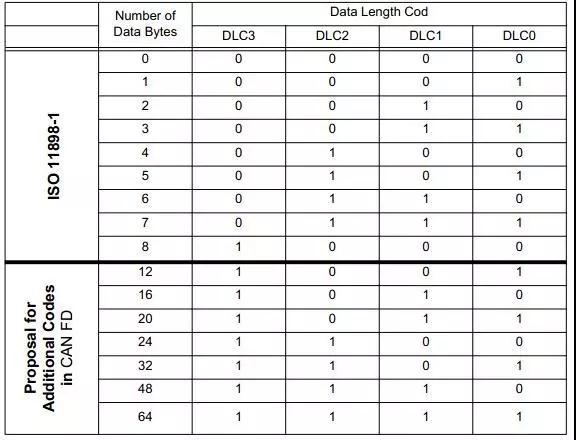
CAN FD并不是支持1-64之间任意的数据场长度,根据DLC编码定义,其允许的数据场长度如下表。
有了“可变速率”和“大数据场”两大法宝,CAN FD的数据传输效率获得了显著提升,成为智能汽车强有力的助推器。
在CAN网络内,若想真正发挥CAN FD的能力,则所有CAN节点都必须是CAN FD节点,且使用相同的变速率。
底蕴底盘
龚淑娟
李峥
热点文章
-

智能汽车场景化开发:系统融合与 用户体验的协同研究
2026-07-20
-

“泰钽”来了!开启智能越野3.0时代
2026-07-22
-

基于传动效率的多模复合功率分流混合动力系统模式控制研究
2026-07-21
-

乘用车混合动力总成系统设计和性能仿真研究
2026-07-22
-

动力系统主导车市质变,增程器迈入系统竞争
2026-07-23
-

基于深度学习的电驱实验系统设计
2026-07-24
-

-
基于深度学习的电驱实验系统设计
针对传统永磁同步电机建模方法难以兼顾精度与实时性的问题,本文基于深度学习技术提出一种融合物理约束的永磁同步电机降阶模型,通过深度神经网络实现对电机非线性电磁特性的精细化建模。围绕所提降阶模型,搭建了电驱实验系统,并将该模型集成至电驱系统中,实现了实时硬件在环验证。在不同工况下对降阶模型和传统dq轴解析模型开展实验分析,结果表明,所提出的基于深度学习的永磁同步电机降阶模型在保证高精度建模的同时,实现了更好的动态性能。该模型支撑的实验系统可用于电驱系统的快速仿真与控制算法研究,具有良好的工程应用前景。
作者:
-
动力系统主导车市质变,增程器迈入系统竞争
-
“泰钽”来了!开启智能越野3.0时代
-
乘用车混合动力总成系统设计和性能仿真研究
-
基于传动效率的多模复合功率分流混合动力系统模式控制研究
-
智能汽车场景化开发:系统融合与 用户体验的协同研究





评论
加载更多