高效、高品质的机器人焊接系统——机器人焊接系统在轿车排气零部件生产中的应用

图1 排气系统的构成
汽车排气系统零部件各个部位的结构特点和焊接要求都不尽一致,按照不同种类工件的外形及其焊接特性,焊接单元的工艺布局有多种形式。
近年来,我国汽车产业飞速发展,车型更新换代很快,汽车产量和品种迅速增加。为了提高生产效率,不断提升并稳定产品质量,同时降低工装投资成本,高柔性的机器人焊接系统在汽车制造业中得到了广泛的应用。
首钢莫托曼机器人有限公司(以下简称“首钢莫托曼公司”)以高性能的MOTOMAN弧焊专用机器人为主要技术优势,其产品及工艺解决方案在轿车车桥、排气零部件、座椅等零部件弧焊领域被广泛应用。本文主要介绍首钢莫托曼公司轿车排气零部件弧焊方面的应用技术。在排气系统领域,首钢莫托曼公司与全球两大排气系统供应商FAURECIA和TENNECO紧密协作,不断推进机器人弧焊技术及其应用的进步。
排气零部件弧焊工艺要求
排气系统是汽车排放和消声的重要部分,主要由歧管、催化净化器、波纹管、中消及后消等部件组成(见图1),各个部位的结构特点和焊接要求都不尽一致。
按照主要功能模块距离发动机的远近,排气系统也可以分为热端、冷端两部分。
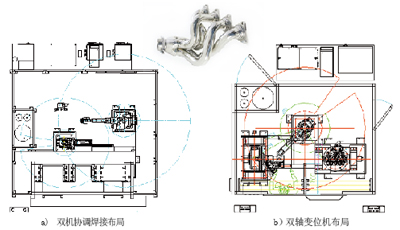
图2 弯管类歧管焊接单元布局
热端部分直接连接发动机排气口,主要包括歧管、净化器、波纹管、二级净化器及挂钩法兰等附属部件。因其所处底盘位置空间紧凑,所以部件外形变化较大,焊缝分布复杂。同时,因其主要功能为净化尾气,故焊缝密封性要求高。
冷端部分承接热端,主要包括中消、后消及挂钩法兰等附属部件。冷端总成通常尺寸较长,焊缝多为小直径环缝,当后消声器包为焊接结构时,通常要求压装焊接,焊缝量较大。消声器包进出气管处焊缝为三层薄板焊接,焊缝成形要求高。
焊接单元的典型布局
排气零部件机器人焊接单元主要由弧焊机器人、焊接设备、清枪剪丝机构、变位机、焊接夹具、安全防护系统、电气控制系统、工件检测设备及物流系统等组成。按照不同种类工件的外形及其焊接特性,焊接单元的工艺布局有多种形式。
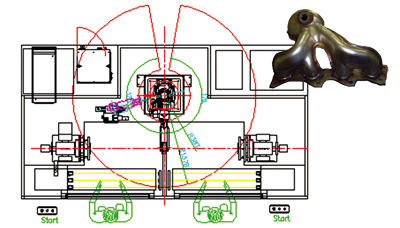
图3 半壳类岐管焊接单元的单座单轴变位机双工位布局
对于各种排气零部件,焊接单元的典型布局如下:
1.弯管类歧管焊接单元布局
弯管类歧管的焊缝空间分布较复杂,需要使用两台机器人协调焊接或应用双轴变位机取得合适的焊接姿态。歧管及其焊接单元布局如图2。
2.冲压半壳类歧管、净化器和波纹管的焊接单元布局
冲压半壳类歧管的焊缝主要分布在半壳一侧的弧面上,应用单轴变位机即可达到合适的焊接位置。此类工件与净化器、波纹管等尺寸小且焊缝分布单一的工件一起,可使用单座单轴变位机双工位布局(见图3)。
3.热端总成焊接单元布局
热端工件是由歧管、净化器、波纹管、二级净化器和挂钩法兰等分总成工件焊接在一起的总成工件,是轿车排气零部件焊接工件中最复杂的一种,通常需分为3~4道工序焊接完成,需采用多道工序夹具分布在单个机器人焊接单元内的紧凑型布局(见图4)。当产量需求较大时,可以用多个机器人焊接单元组成U型线,优化物流。
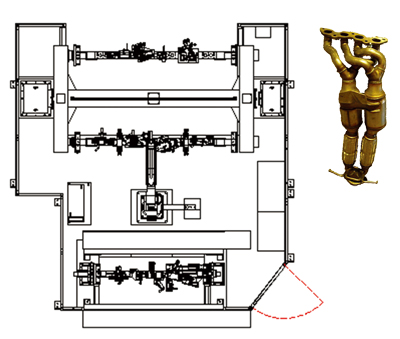
图4 热端总成焊接的多工位紧凑型布局
4.半壳类消声器大包焊接单元布局
半壳类消声器大包在焊接过程中需要加压到80kN以上,需要使用可安装液压模具的特殊双轴变位机实现焊接工艺,其布局如图5所示。
5.冷端总成焊接单元布局
排气系统冷端总成工件通常由法兰、进出气管、消声器大包、挂钩支架等部件焊接组成。按排量大小分为单、双系统两种形式(见图6)。
冷端总成工件的长度通常为2~3m,焊接单元常用布局为立式翻转三轴变位和水平回转三轴变位两种(见图7)。双系统冷端总成焊缝分布范围较大,更适用于水平回转三轴变位布局。
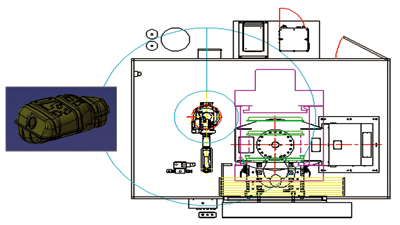
图5 半壳类消声器大包的焊接工艺布局
便捷的夹具快换
便捷的夹具快换可大大提高焊接系统的设备利用率,使用户可以根据需求随时调整生产,减少重复性投资和设备闲置。同时,利用夹具快换功能,还可实现在新产品试制和小批量生产阶段先投夹具,在现有机器人焊接线上生产,批量生产阶段前再建新的焊接线。
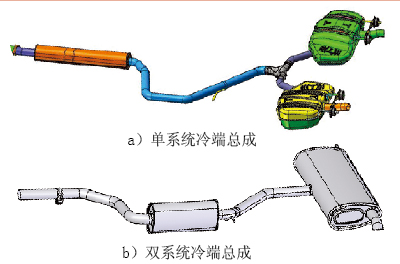
图6 排气系统冷端总成
首钢莫托曼公司在大量的机器人焊接系统应用项目中总结并作为标准固定了几种夹具快换方式。
1.整根夹具梁快换的设计和快换方式
夹具梁和变位机间的快换连接:夹具两侧安装定位销,变位机法兰一侧采用定位销套,另一侧采用键槽的定位方式。连接时,夹具两侧的定位销依靠重力插入销套和键槽中定位,连接板两侧的翻转螺钉压紧连接板。这种快换结构(见图8)简便可靠,定位重复性效果好,已经成为通用快换结构标准。
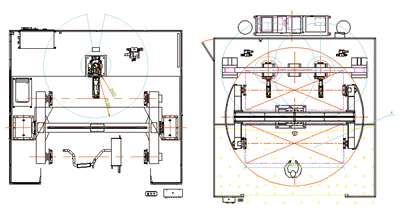
图7 立式翻转三轴变位焊接单元布局(左)和水平回转三轴变位焊接单元布局(右)
夹具重量通常为200~400kg,要想快捷省力地更换夹具,就需要使用辅助工装来升降和移动夹具。单梁夹具的辅助工装可以使用液压堆高叉车改造,在叉车上加装夹具梁锁紧结构防止夹具侧翻,或者在夹具梁上安装可快速拆换的叉车靴套。
2.小件夹具及部件快换的设计和快换方式
当单根夹具梁上夹具的互换性高时,可以使用标准快换式夹具梁(见图9)。此时夹具梁上的定位销按标准尺寸分布,小件夹具可用其底板上的标准尺寸定位套与梁配合定位,使用开口快换垫圈快速夹紧。当夹具需要更换部件以适应不同型号的工件在同一套夹具上生产时,也可使用同样的结构。
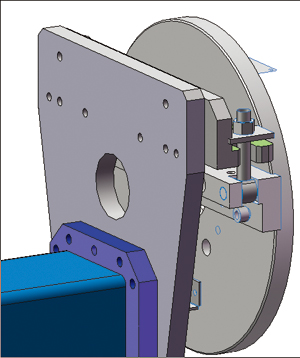
图8 夹具梁和变位机间的快换结构
小件夹具或快换的部件人工更换时重量要控制在20kg左右,否则需要专用辅助工装。部件更换时,气缸与阀间的气管可通过多路快换接头拆开,阀留在夹具梁上,供替换夹具重复使用。电控线缆连接采用多针航空插头断开。
应用上述快换结构,单套夹具更换时间可控制在10min内,可大大提高机器人焊接系统的整体生产效率。

图9 标准快换式夹具梁
排气零部件机器人弧焊生产线的发展
首钢莫托曼公司从1998年开始研制排气零部件机器人弧焊系统,到目前为止共制造了150余台(套)排气零部件机器人弧焊站,产品涉及的轿车品种近60种,不仅涵盖了国内主要轿车生产厂,2008年还向韩国和波兰的TENNECO公司出口了用于制造通用Epsilon II平台系列排气系统的整套焊接线及工装夹具(见图10)。此外,首钢莫托曼公司还成功开始向大型客车用排气系统焊接线进行业务扩展。

图10 TENNECO公司用于制造通用Epsilon II平台系列排气系统的整套焊接线及工装夹具
从MOTOMAN-EA1400弧焊专用机器人到MOTOMAN-SSA2000型机器人,再到t轴弧焊专用机器人MOTOMAN-VA1400及新一代机器人控制器DX100,机器人的轴动作速度和焊接速度不断提高,同时,其机动性和可达性都达到了新的高度,特别是新的t轴机器人MOTOMAN-VA1400,为焊接工装设计、生产空间布局、焊接姿态优化增加了更多的优化空间。今后,首钢莫托曼公司将结合新型t轴机器人的专有技术,进一步研制布局紧凑、空间占用小的高速机器人弧焊系统,使排气零部件领域的装备水平再上新高!
龚淑娟
李峥
热点文章
-

智能汽车场景化开发:系统融合与 用户体验的协同研究
2026-07-20
-

“泰钽”来了!开启智能越野3.0时代
2026-07-22
-

基于传动效率的多模复合功率分流混合动力系统模式控制研究
2026-07-21
-

乘用车混合动力总成系统设计和性能仿真研究
2026-07-22
-

动力系统主导车市质变,增程器迈入系统竞争
2026-07-23
-

基于深度学习的电驱实验系统设计
2026-07-24
-

-
基于深度学习的电驱实验系统设计
针对传统永磁同步电机建模方法难以兼顾精度与实时性的问题,本文基于深度学习技术提出一种融合物理约束的永磁同步电机降阶模型,通过深度神经网络实现对电机非线性电磁特性的精细化建模。围绕所提降阶模型,搭建了电驱实验系统,并将该模型集成至电驱系统中,实现了实时硬件在环验证。在不同工况下对降阶模型和传统dq轴解析模型开展实验分析,结果表明,所提出的基于深度学习的永磁同步电机降阶模型在保证高精度建模的同时,实现了更好的动态性能。该模型支撑的实验系统可用于电驱系统的快速仿真与控制算法研究,具有良好的工程应用前景。
作者:
-
动力系统主导车市质变,增程器迈入系统竞争
-
“泰钽”来了!开启智能越野3.0时代
-
乘用车混合动力总成系统设计和性能仿真研究
-
基于传动效率的多模复合功率分流混合动力系统模式控制研究
-
智能汽车场景化开发:系统融合与 用户体验的协同研究





评论
加载更多