汽车主动避撞系统技术发展分析
目前研究开发的系统有以下3种类型:(1)车辆主动避撞报警(collision warning)系统,此系统对探测到的危害情况给出警报,美国已经在一些重型载货车和公交车辆上实现商用。(2)车辆自适应巡航控制 ACC(adaptive cruise control)系统,此系统可以实现简单交通情况下的主动避撞及巡航控制,一些汽车公司在高档车型上已经开始采用ACC技术。(3)复合型车辆智能控制系统,该系统针对复杂交通情况,特别是市区交通环境,采用ACC系统辅以车辆停走(stop&go)系统,提高车辆智能控制的实用性。
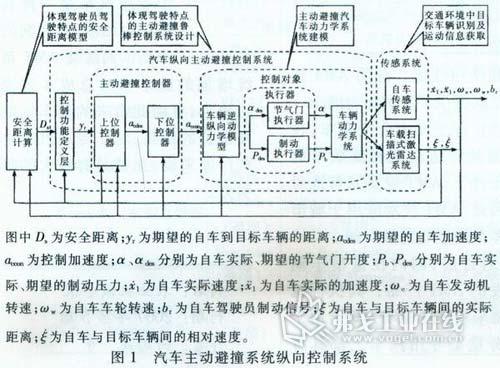
目前国内外汽车主动避撞系统的研究绝大多数集中在避撞系统的纵向控制,其控制系统如图1所示。系统的关键技术包括行驶环境中目标车辆识别及运动信息的获取、安全距离模型和避撞控制系统建模。
行驶环境识别 环境识别的关键是距离的测量。目前距离测量采用的技术手段有超声波测量、红外线测距、激光测量、机器视觉和雷达技术。雷达测量的实时性、准确性较好。目前工作在毫米波段的毫米波车载雷达系统被认为是解决汽车主动避撞条件下控制探测问题的较好方案。很多公司的测距技术已经进入实用化。通用公司正在研究的避撞报警系统采用的是激光雷达技术;德国维尔德·黑布吕格公司研制的MEAR激光器测距系统,可向驾驶员提供与其它车辆和障碍物之间的距离及相对速度数据,同时提供视频图像;奔驰、日产等汽车公司都在应用德国ADC公司生产的毫米波雷达系统。
安全状态判断 安全状态判断多采用安全距离逻辑算法,基于车辆制动过程运动学分析、乘坐舒适性、车间时距、驾驶员特性等因素建立不同的安全距离模型。其中,基于车间时距的安全距离模型未考虑驾驶员实际感觉应当保持的车间距离还与相对速度有关这一因素,判断结果不符合驾驶员的主观感觉。因而,日本的研究人员建立了驾驶员预瞄安全距离模型。但该模型在前方车辆制动的避撞系统典型工况下,模型的加速度固定,导致模型的判断结果不符合驾驶员的主观感受。针对此问题,进行了驾驶员最优预瞄加速度模型的研究。
避撞系统控制 汽车主动避撞控制方式主要有上位控制和下位控制。前者由安全距离出发,从运动学的角度应用控制算法获得当前情况下车辆应当具有的减速度等;后者从上位控制算法确定出的车辆目标减速度等目标参数出发,结合车辆制动系统模型,应用控制算法,实现对节气门、制动、转向等精确控制,实现上位控制要求的目标。控制算法有模糊控制和神经网络控制,适合于非线性目标的滑模控制算法和Back-stepping方法。
主动避撞系统存在的问题 目前的研究考虑的侧面目标和其它类型距离目标非常少,系统存在冗余报警、误报及对驾驶员特性考虑不足等问题。在控制模型中只考虑了纵向控制模型,对于车辆高速转向制动、超车等危险工况,必须建立考虑侧向控制的动力学模型。而在模型的控制器设计方面,现有的上位控制器设计考虑驾驶员驾驶特点不够,而下位控制器的鲁棒性较差,不能满足避撞系统的需要,有待进一步研究解决。












![]()
2001-2009 Vogel Industry Media版权所有 京ICP备12020067号-15 京公网安备110102001177号


获取更多评论