基于XC886单片机的门控系统LIN总线通信模块设计
0 引言
随着汽车业的飞速发展,汽车电控系统的配置不断升级,使得车辆上的电子元件越来越多,其相互连接的网络结构也越来越复杂。过去所采用的电缆连接方式所带来的庞大布线负担,容易造成车体过重和线路的磨损老化。在这种情况下,就需要引入标准的总线技术,从而降低车身重量,同时提高各个电控元件之间的通信可靠性。上世纪80年代,根据车用通信网络在不同控制层面的不同功能要求,SAE (Societv ofAuto-mobile Engineering)将其分为A,B,C三类。其中A类为低速网,数据传输速率通常为1~10kb/s,通信网络就属于此类。LIN总线一般应用于不需要高性能及带宽和复杂性较大的低端系统,如车门控制模块、座椅调节、车灯控制和空调系统中传感器和执行器之间的通信。由于其LIN总线成本较低,也可以独立用于不是特别复杂的车身控制网络中。
1 LIN总线协议简介
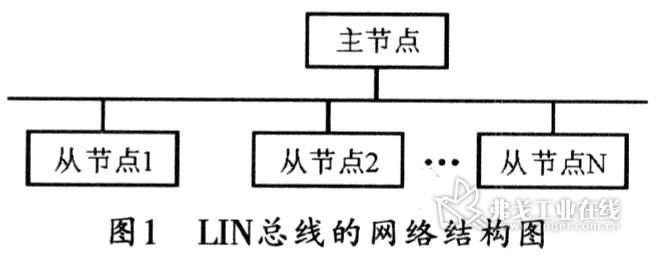
LIN协议标准于1998年由Audi、BMW、Mo-torola、Daimlerehrysler、VCT、Volvo和Volkswa-gen等七家公司在A类网已有协议的基础上联合提出。LIN总线在当今汽车电子的网络结构中被广泛使用,它基于通用的UART/SCI接口,使用单线信号传输,从节点无需晶振或陶瓷振荡器就能实现自同步,因此成本低廉。LIN总线网络采用单主多从模式,图1所示是UN总线网络的结构示意图,它由一个主节点和一个或若干个从节点组成,不需要总线仲裁。LIN总线协议基于ISO参考模型中的物理层,数据链路层采用NRZ (Not Re-turn Zero)编码方式,电平分为隐性电平(‘1’)和显性电平(‘0’)。
1.1 物理层
LIN总线一般采用单总线(12 V)串行通讯,总线长度最大可达到40 m,传输速率最高可达到20 Kb/s,通常使用2.4Kb/s、9.6 Kb/s和19.2 Kb/s这三个波特率进行数据传输。由于从节点的个数除了受标识符数量的限制中,也受到总线的物理特性限制,节点过多必然减少网络阻抗,从而导致通讯条件变差,所以协议规定:一个LIN总线网络上的节点数目不能超过16个。
1.2 数据链路层
LIN总线协议的一个报文帧由报文头和响应组成,图2所示是LIN总线协议的报文帧结构。一般情况下,报文头都是由主节点发送,而响应则是由一个主节点或者一个从节点发送。LIN总线网络中的数据通讯都是由主节点发送一个报文头来初始化的。报文头包含一个空白场、一个同步场和一个标识符场,而响应则包括1 到9个字节场(0~8个数据场和一个校验和场)。其中,字节场由字节间的间隔分开,报文头和响应则由帧内响应间隔分开,它们的最小长度皆为0。
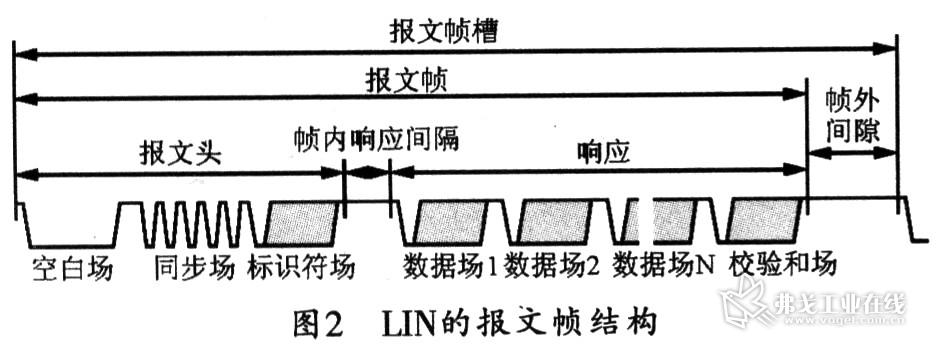
报文头中的空白场可使节点能够识别一个报文的开始。空白场为13位或者持续更长时间的显性电平(‘0’)加上持续1个位时间以上的隐性电平(‘1’)组成。同步场则为一个字节长度(ox55),可用来使相关从节点进行主从节点的时钟同步。
标识符场格式如图3所示,定义报文的信息,长度为一个字节,其中前6位为标识符位,可定义26=64个标识符(其中保留4个标识符作为命令和扩展帧标识符),后2位为奇偶校验位。

标识符用于定义数据的传输方向和响应中数据场的长度,并从节点根据标识符判断报文是否与自己相关,从而对报文做出反应,进行通讯。当主节点发送的报文头被相关从节点接受并对标识符判断之后,从节点被要求进行数据发送,而主节点要接收从节点发送的数据,则需要将此标识符定义为接收标识符,对于从节点来说,则需定义为发送标识符,反之亦然。
响应中数据场的长度由标识符位中的第4位和第5位(ID5和ID4)决定,它们将所有的标识符分成四组。每组有16个标识符,这些标识符代表着2、4和8 个数据场。数据场的传输由低位到高位,包含了各个节点需要传输的数据。校验和场是数据场所有字节的和的反码,当节点收到数据并进行校验时,要求所有数据字节和与校验和场的字节相加必须是0xFF。
2 车门控制中LIN通信系统的设计
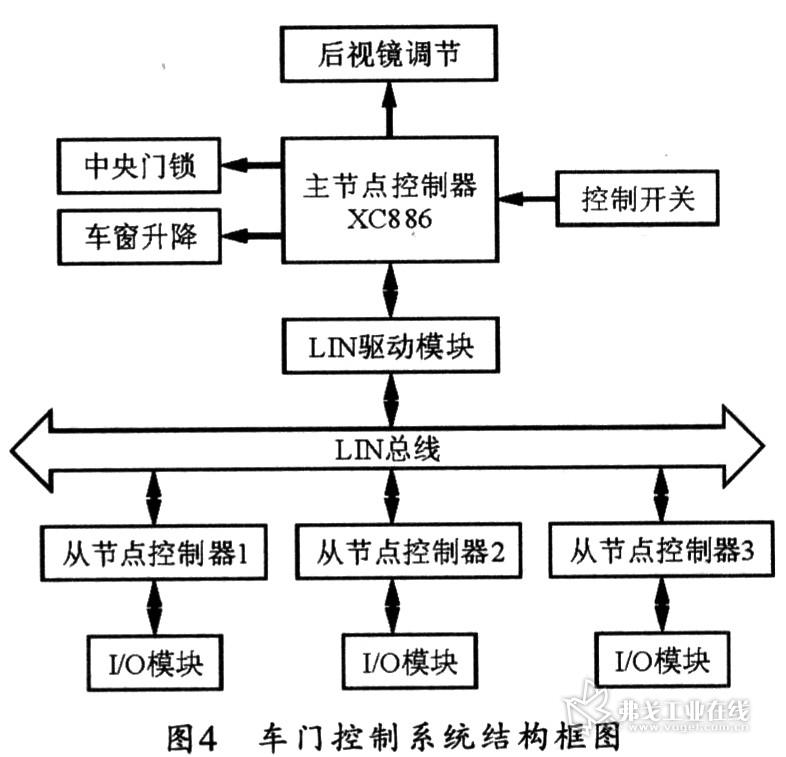
本设计方案主要采用英飞凌作为主节点控制器,以英飞凌的TLE7259芯片作为LIN驱动模块,这样可使主节点车门控制器可以通过LIN 总线与3个从节点车门控制器(TLE7810)进行通信。作为主节点,在此中,可以通过司机侧按钮开关对所有车窗进行升降,并可进行后视镜的调节和中央门锁的控制。图4所示是车门控制系统的结构框图。
2.1 与UN驱动模块的接口设计
英飞凌公司的XC886是基于8051工业标准架构的高性能8位微控制器,其内部集成有CAN控制器并支持UN通信,同时包含两个UART(其中一个用于支持LIN)和两个单独16位计时器的捕捉/比较单元(CCU),可灵活产生PWM信号。此外,还集成有高精度8路10位ADC、四个通用16位计时器和可编程16位看门狗计时器(WDT),并支持片内调试。XC886包含多种省功耗模式,非常适用于各种汽车车身控制网络以及工业和农业设备控制、建筑物照明控制、智能传感器和工业自动化等领域。
系统中的LIN驱动模块选用英飞凌公司的TLE7259芯片,它具有总线接地短路保护功能,适用于传输速率为2.4 kb/s~20 kb/s的车载系统通信网络。同时,该器件还具有极强的防静电放电(ESD)特性和优越的抗电磁干扰(EMI)能力。其基于固定斜率的斜率控制机制,还可实现在宽频带范围内优越的EMC性能。在XC886作为主节点控制器的设计方案中,必须在TLE7259芯片的LIN_BUS引脚与INH引脚之间连接一个1kΩ的电阻和一个反向二极管,并将TLE7259配置成主节点驱动模块。图5所示是系统LIN驱动模块的接口电路。
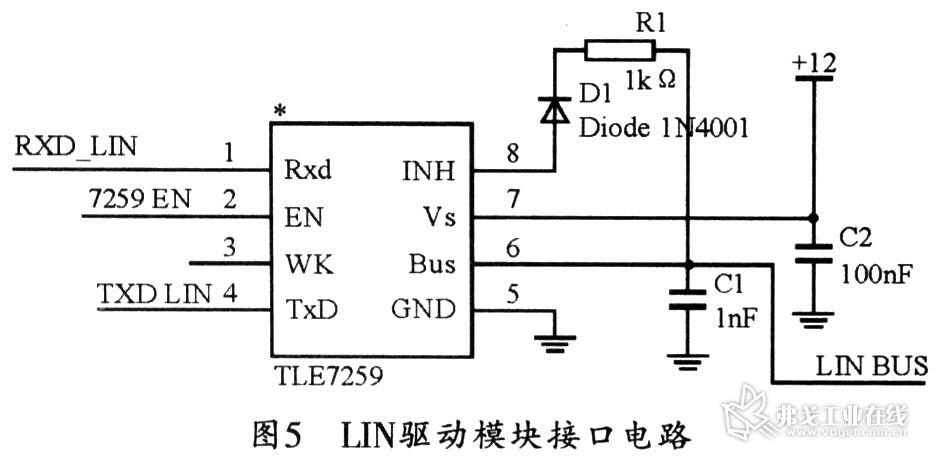
TLE7259芯片具有等待模式、正常模式和睡眠模式等三个工作模式。上电后。芯片立即进入等待模式,然后可通过EN引脚置1使之进入正常模式。在正常模式,XC886单片机可在TXD LIN管脚输入所需发送的数据流,并通过TLE725芯片转换成LIN总线信号,以控制转换速率和波形,从而降低电磁辐射(EME)。LIN总线的输出管脚(Bus)可通过一个内部终端电阻拉成高电平。TLE725芯片可在LIN总线的输入管脚检测数据流并通过管脚RXD_LIN发送到XC886单片机。在正常模式下,将EN引脚置0可使芯片进入睡眠模式,此时的静态电流不超过8 mA,用户也可以通过LIN总线或本地引脚(WK)进行唤醒,使之重新进入等待模式。
2.2 LIN通信中主节点的软件实现
软件采用C语言模块化编写,易于维护。本设计方案中,LIN总线的传输速率设置为20 kbit/s,可在单主节点和3个从节点之间通讯,支持数据场长度设置为2个字节。第一个字节用于发送主节点控制命令或接收从节点状态信息,后一个字节为预留,可用于用户扩展。
通常由主节点向从节点发送控制命令,主要包括车窗升降控制、车门锁命令和后视镜调节控制等,表1所列是其控制命令的数据场定义。当车窗控制部分发送车窗无动作命令时(Bit2为0),可忽略后两位(Bit1和Bit0)判断,车窗保持原状。当后视镜部分发送后视镜无动作命令时(Bit6为0),则忽略后三位(Bit5,Bit4和Bit3)判断,此时左右两个后视镜电机均无动作,后视镜位置保持原状。中控锁部分(Bit7)用于中控锁的状态比较,若位数据相同,则保持中控锁状态,若位数据不同,则驱动中控锁电机进行相应动作。

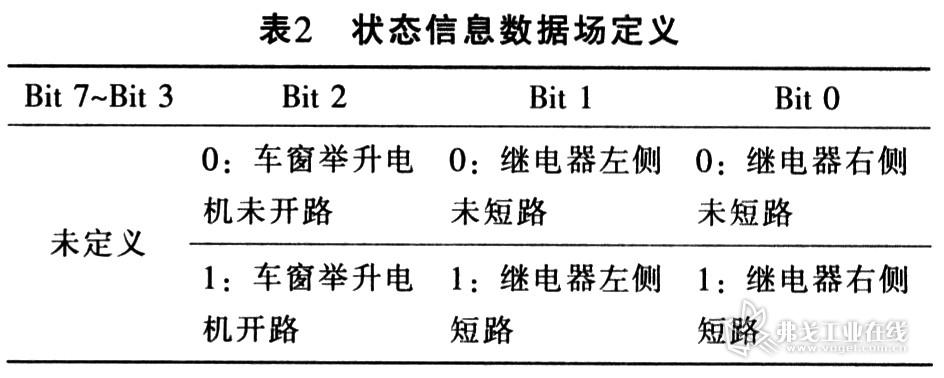
状态信息一般由从节点反馈给主节点,以用于故障诊断,主要包括车窗升降电机和继电器的短路和开路信息等,表2所列是状态信息的数据场定义。当主节点收到后状态信息后。若发现故障,则主节点控制器将使指示灯闪烁或者进行声音报警。
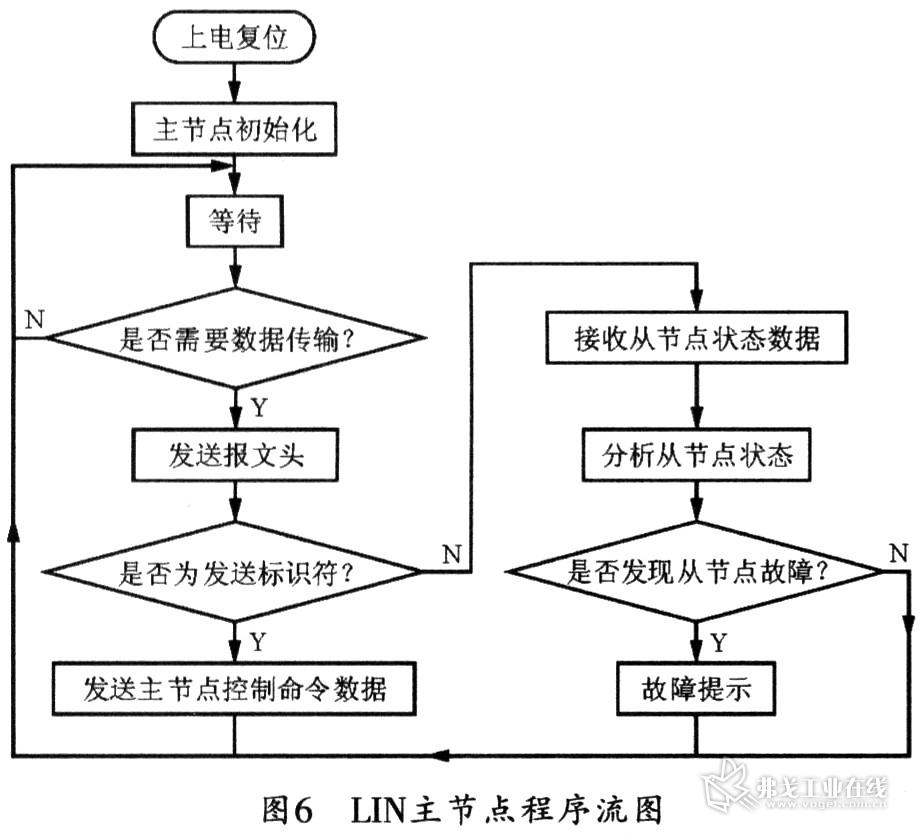
主节点初始化之后,系统将处于等待状态,同时检查是否有数据传输需求。主程序每10 ms检查一次主节点控制器的按键参数。当司机侧主控板上有按键动作时,系统会将相应按键数据转换成控制命令并通过LIN总线发送给从节点控制器;若没有按键动作,则要求从节点反馈状态信息,并分析其工作状态。图6所示是其主节点的程序流程图。
3 结束语
本文介绍了基于英飞凌公司的XC886单片机的车门控制系统的LIN总线通信模块的设计方法,并对其硬件设计和软件结构进行了简单的分析。运用LIN总线技术开发的车窗、后视镜和中央门锁控制系统,由于使用了低功耗的8位单片机,因而降低了成本,提高了系统性能,是汽车电子技术的发展方向。本系统程序采用 C语言编写,具有很好的可读性和维护性。事实上,总线技术的发展是推动汽车电子进步的一大动力,总线技术的广泛使用则进一步促进了汽车生产商对总线开发的投人,因此,汽车总线的开发必然在将来的汽车工业中占据更为重要的位置。












![]()
2001-2009 Vogel Industry Media版权所有 京ICP备12020067号-15 京公网安备110102001177号


获取更多评论