
基于CAN-GSM车辆监控系统设计
0 引言
近年来,随着我国经济的高速发展及汽乍保有量和驾驶员总数的快速增长,道路交通事故数一直居高不下,道路交通状况日趋复杂和恶化。群死群伤特大恶性道路交通事故时有发生,给人们的牛命安全和家庭幸福造成了极大的影响。因此,加强车辆管理就显得尤为重要。而交通安全主要由两方面来保证,一是车辆具有良好的车况,另一方面是驾驶员规范的操作。因此如何监控管理车辆和规范驾驶员操作是当前迫切需要解决的问题。
汽车行驶记录仪,又称“汽车黑匣子”,是对车辆行驶速度、时间、里程以及有关车辆行驶的其他状态信息进行记录、存储并可通过接口实现数据输出的数字式电子记录装置。然而行驶记录仪不能实时地向监控中心传回车辆的运行情况,属于事后监督,因此在预防交通安全事故方面所起的作用有限。基于GPS/的系统能够实时地获得车辆的位置、速度等信息,为车辆的实时监控提供了一种有效途径。但是GPS却无法获得诸如气压、水温、转速等重要车况信息,因此对车辆的监控缺乏全面性。
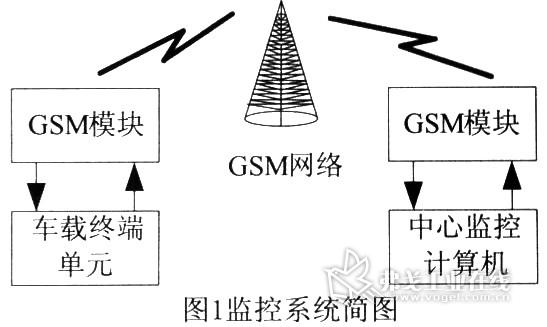
基于/GSM的车辆监控管理系统,是为具有CAN总线的汽车开发的。该系统的车载监控设备首先从车辆的CAN接口上获得详细的车况信息,然后依托我国目前最成熟、应用最广的GSM移动通信系统与监控中心进行通信,来实现对车辆全面、动态、实时的监控。使用CAN总线,不仅可获得全面、详细的车况信息,而且使系统具有很强的扩展性,例如,可以将GPS模块作为CAN的一个智能节点挂接在总线上,这样系统就具备了监控车辆位置的能力。
1 CAN总线技术
为了实现现代汽车中庞大的电子控制装置之间的通信,减少不断增加的信号线,因此在信息传输方面上必须采用总线的方式进行传输。 CAN(Controller Area Network)总线正是现今流行的一种较为先进的、性能出色的现场总线技术。它是80年代初德国Bosch公司为解决现代汽车中众多的控制与测试仪器之间的数据交换而开发的一种串行数据通信协议,是一种多主总线,通信接口集成了CAN协议物理层和数据链路层功能,可对通信数据进行帧处理。CAN通过对通信数捌块进行编码,保证了网络内节点个数的动态性,并使不同的节点同时接收到相同的数据。数槲段长度最多为8个字节,保证了通信的实时性;而协议利用 CRC检验提供相应的错误处理功能,能够保证数据通信的可靠性。由于CAN技术规范仅包括物理层和数据链路层说明,并未对应用层的功能和实现进行定义,因此,用户既可以采用国际CAN总线用户及制造商协会或其他一些组织制定的开放式高层协议,也可以住工程中灵活地实现自己的应用层。在十多年的应用过程中,CAN以其极高的可靠性、实时性和灵活性,在工业过程监控设备的互连方面获得了广泛的应用,得到了英特尔、摩托罗拉、菲利浦、西门子等百余家国际著名大公司的支持,被公认为是最有前途的现场总线之一。本系统利用CAN总线的以上特性,减少了车内的线束,解决了众多节点之间的通信问题。
2 车辆监控管理系统设计
2.1 系统设计
本车辆智能监控系统是利用CAN总线技术采集车辆的各种信息,例如车辆每次的起动时间、行驶里程、行驶时间、最高车速以及每次最高车速的持续时间,储存停车前20秒的车辆信息。然后利用现存的GSM网络,将信息以短消息的形式传送给监控中心,以实现对车辆的实时监控。
2.2 硬件设计
车载监控设备的主控芯片采用飞思卡尔(Freescale)公司为汽车电子应用而开发的16位单片机MC9S12HZ。该单片机与车载监控设备相关的主要资源有:32~256K的Flash、2~12K的RAM和1~2K的EEPROM;2个可兼容CAN2.0A、B速率可达lMb/s的CAN控制器;2 个全双工异步串行通信接口;32×4段LCD驱动器。
由MC9S12HZ构成的车载监控设备硬件连接示意图如图2所示。与CAN总线的接口方面,我们采用恩智浦(NXP)公司的高速CAN收发器TJAl050,为了提高电EMC和ESD性能,在电路中还加入了共模扼流圈L40和ESD保护二极管D39。
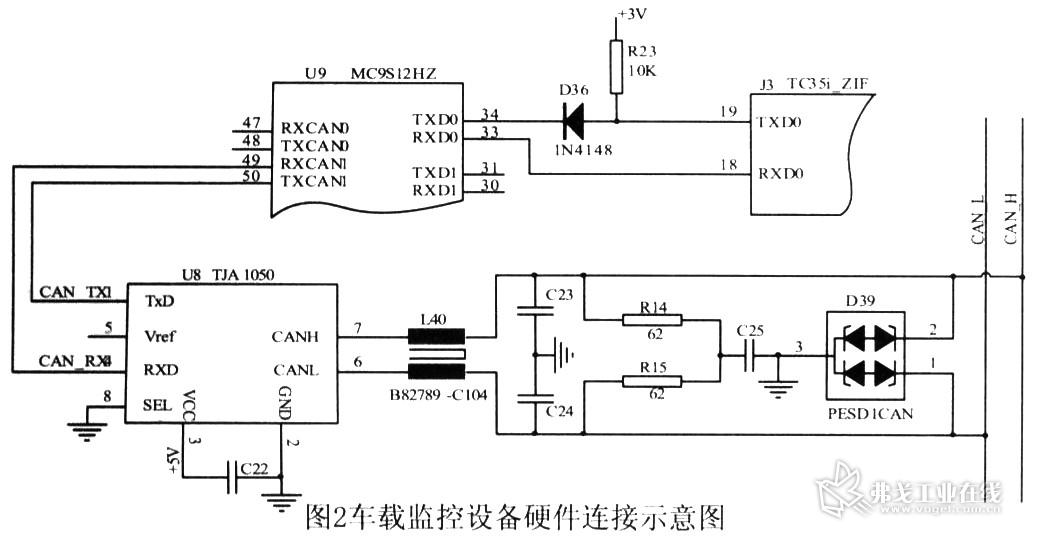
GSM模块采用了两门子的TC35i,该模块通过40脚的ZIF(Zero Insertion Force)接口与外部控制器建立连接。监控系统仅使用了GSM网络的SMS业务,因此主控芯片与TC35i仅需要其中的TXD和RXD两个管脚就够了,主控制器MC9S12HZ通过AT命令实现埘TC35i的控制。
#p#副标题#e#单片机与TC35i之问通过串口进行通讯,TC35i支持的自动波特率范围为1200~230400B/s。我们选用9600B/s的波特率。由 TC35i手册可知,其串行接口需要CMOS电平,而MC9S12HZ是TTL电平,因此需要电平转换电路,如图2所示。监控中心由PC机与TC35i模块组成,它们之间的电平转换由电平转换芯片MAX232完成。
2.3 软件设计
在总线上传输的车辆运行参数非常多,数据量很大,而网络的SMS业务传输速度有限,因此不可能将CAN总线上的所有信息都传回监控中心。实际上也没有必要监控所有的车辆运行参数,只要监控我们最关心的、与行车安全关系最紧密的一些参数就足够了。
对于不同的参数,监控的形式是不同的,有些信息需要定时地进行监控,比如车辆位置信息,而有些信息只有在超出正常范围时才需要发送,如车速或转速信息等。此外,对于不同车型,需要监控的参数也是有区别的;或者对于同一个参数,在不同的情况下,其监控形式和监控范围也会发生变化。因此要求车载监控设备可以动态地改变监控参数和监控形式。
为了实现对车辆的动态监控,在车载监控设备的控制器中建立了一个监控列表。列表中的每一项包含参数群编号PGN、监控参量在该PGN中的位置、监控的形式及监控时间间隔和监控参数范围等。这个参数列表的项目可以根据监控中心发来的命令进行动态的增加或删除,从而实现对车辆的动态监控。
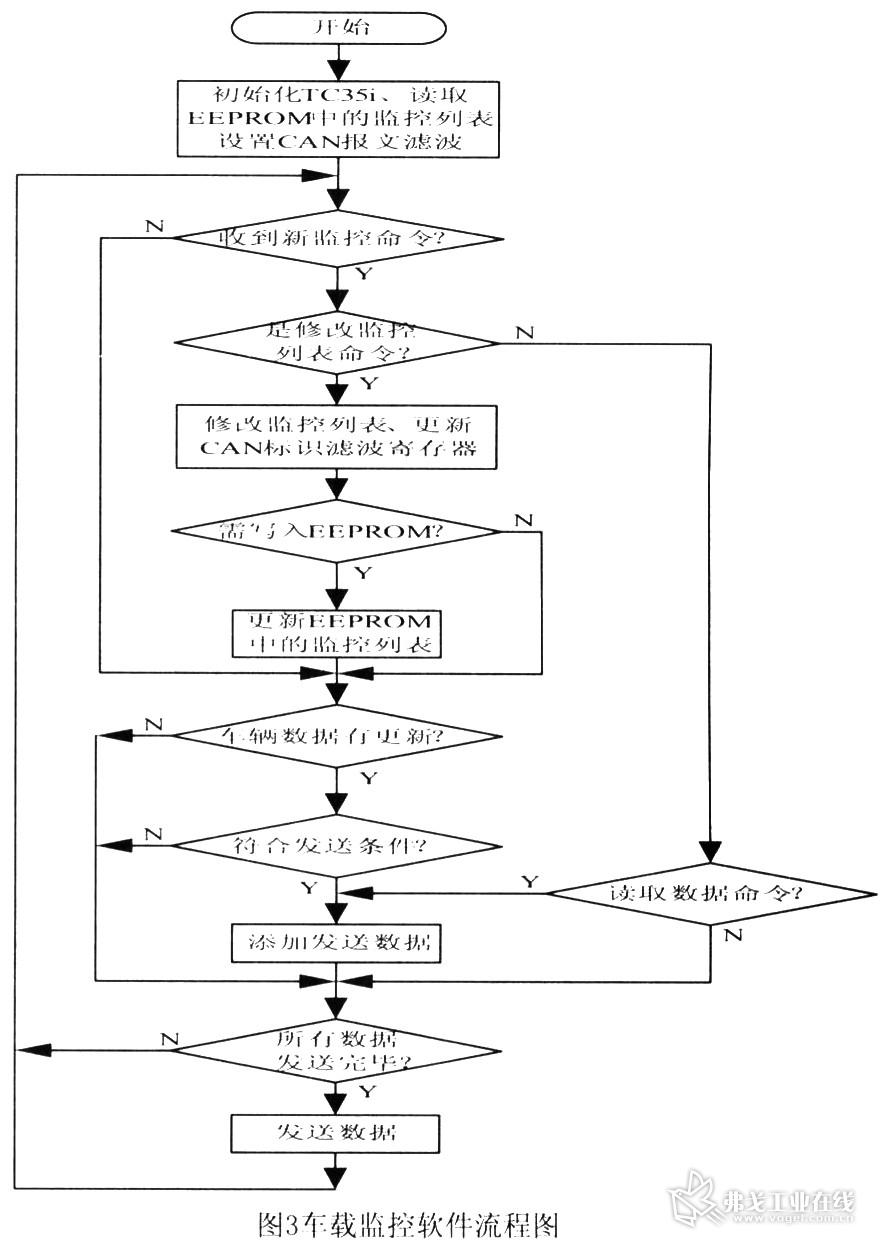
车载监控设备的软件主程序流程如图3所示。串行通信的收发程序及CAN总线的监听程序放在中断程序中完成,当接收到相应命令或数据后,将数据放入缓冲区并设置相应的标志位,主程序通过查询这些标志位来执行相应的动作。主程序首先读取存储在片内EEPROM中的默认临控列表,并根据监控列表中的PGN,设置 MC9S12HZ的CAN ID报文标识符滤波及掩模寄存器。程序可根据命令动念地修改监控参数列表,并根据命令决定是否更改EEPROM中的默认临控列表。当要监控的PGN有新数据时,要判断该数据是否符合发送条件,这些条件包括定时间隔到、监控变量值是否超正常范围等,如果符合发送条件,则将该PGN及其对应的数据添加到发送列表中。
3 结束语
本系统利用CAN总线技术来获得车辆的各种详细信息,并且应用GSM网络与监控系统进行通信,不仅实现了对参数的动态设置,还由于CAN总线技术的采用,使得通过增加CAN的智能节点来扩展监控对象变得很容易。这就大大提高了监控系统的灵活性和全面性。同时利用GSM短消息业务进行数据传送,连接简单,费用低廉,覆盖范围广。





![]()
2001-2009 Vogel Industry Media版权所有 京ICP备12020067号-15 京公网安备110102001177号


正在获取数据......