基于OSEKturbo实时操作系统的ABS设计
0引言
作为智能交通的主要组成部分,车载导航定位己成为最近的研究热点[1]。随着全球定位系统(GPS)从军用转为民用后,GPS技术应用于移动目标的监控有着其它无法比拟的优势,所以采用GPS技术对各种车辆实施监控、调度管理成为一个新的研究热点。
GPRS可以实现数据的实时交换,而且按照数据流量计费,特别适合应用在车辆卫星定位系统这种频繁的小流量数据传输的场合。因此,本系统采用GPRS作为车载电脑与服务器的通信方式。
由于地图匹配采用了复杂的算法,道路网络的拓扑结构须采用数据库方式,整个定位系统须采用高级语言编程实现。基于这些特点该车载定位装置采用单板工控电脑作为硬件平台,操作系统采用Windows XP Embedded with SP2 。相对于Linux, Windows CE等其他嵌入式操作系统,选择嵌入式XP的好处是,用户方的现有程序不必重新编程,而研制方的编程人员对基于Windows的编程己经比较熟悉,不必学习新的操作系统下如何编程。
随着网络技术的发展和人们对车辆定位的需求,急需利用Internet实现对指定的车辆查询定位,使用户可以直接通过访问车辆导航定位公司的网站即可以文本和图像的形式显示给用户。Web 是在Internet环境下运行的GIS,就是利用互联网技术和WWW技术来完善和扩展传统的GIS功能的一门新技术。因此,如何利用Web GIS技术结合GPS技术实现在Internet环境下车辆定位查询是一个很值得探讨的问题并具有现实意义。
1系统的总体架构
1.1系统的组成
在车辆定位中该应用系统主要包括如下4部分:车载GPS移动终端, GPRS通信网络、车辆服务信息中心和用户,如图1所示。
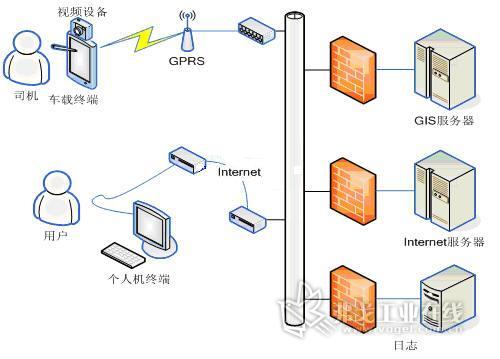
图 1系统的组成图
1. 2工作原理
其中车载GPS移动终端可以为服务中心提供移动目标的最新定位数据、车辆运行速度和方向等信息,并将该信息通过无线通信网络GPRS传到车辆服务信息中心,车辆服务信息中心通过无线通信网络GPRS与车载GPS移动单元通信,通过Internet与客户通话。当客户端提交车辆定位请求后,车辆服务信息中心接收该请求并通过无线通信网络GPRS向车载移动单元发出定位指令,然后将该车辆的最新信息传回车辆服务信息中心,服务信息中心接收新的车辆信息并在地图上绘制,然后以文本和图片组成的网页传回客户端。
2 车载电脑终端硬件平台构建
该车载电脑终端硬件平台采用AAEON公司的 GENE-8310开发板作为平台,该开发板实际就是一个嵌入式的电脑处理平台。板载 Intel® Celeron® M 600MHz处理器,具有强劲的处理能力。具有良好的显示支持,丰富的接口。对于客户在低功耗控制下的优秀处理能力等更高需求方面都是最好的选择。特别是因为它基于Intel平台,在普通电脑上开发的软件可以不用修改就可以在该平台运行。简化了编程工作量。在该开发板的基础上扩充GPS和GPRS模块,构成车载电脑终端的硬件系统。
3 车载操作系统的开发及构建[2]
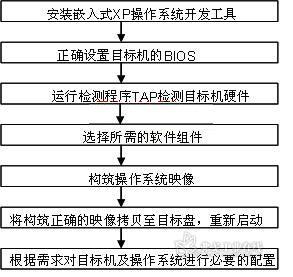
图2 嵌入式XP操作系统开发过程
该车载电脑终端软件平台以Windows XP Embedded with SP2作为操作系统。Windows XP Embedded是桌面 Windows XP操作系统的组件化版本,它能够快速开发出最为可靠的全功能连接设备。Windows XP Embedded采用与Windows XP Professional相同的二进制代码,从而使得嵌入式开发人员能够只选择那些小覆盖范围嵌入式设备所需的丰富定制化特性。该系统中我们选用了512M的CF卡作为车载操作系统和应用软件的载体,操作系统控制在100M以内。
具体的嵌入式XP操作系统的开发,大致可分为几个步骤,如图2所示。鉴于篇幅,在此就不作详细介绍了。
#p#副标题#e#4 GPS数据接收及优化处理
GPS接收模块采用飞鹰公司的TFAG30,车载GPS移动单元传回的定位信息为 NMEA0813标准格式的数据,其中$GPGGA(字头标识符),hhmmss. ss(时间,时、分、秒),bbbb, bbbb(纬度,度度分分,分分分分),N(北纬,s指南纬),IIII ,IIII(经度,度度度分分,分分分分),E(东经,w西经),q (1表示定位模式GPS , 2表示DGPS),nn(卫星数),P(水平位置定位精度因子),h, h(海平面的天线高),m.,g.g(椭球面上的天线高),m,xxx(为DGPS有效数据期),aaaa (DGPS基准站的编号),ss(校验和),< CR>回车<LF>换行
由于接收到的卫星数据存在星历误差,电离层误差,对流层误差以及随机噪声等,为了提高定位的精度,需要对卫星定位数据作差分算法的处理[4]。
为了消除随机噪声和动态噪声对定位结果的影响,在数据处理之前先要对定位数据进行滤波平滑。下面给出所采用的卡尔曼滤波方法的说明。
(1)动态方程

式中,PRC为校正后的伪距;PRm为测量到的伪距;a为伪距的加权系数;△r为未经加权的距离校正值;CPR为基准站测量到的伪距校正值;CPw为基准站测量到的伪距率校正值;ti为测量伪距的时间;t0为校正时间的参考时间;k为其他误差。
经过差分处理之后,数据定位精度可以保证在10m之内,满足实际应用需求。
5 GPRS无线链路的建立
GPRS 无线通信模块采用西门子公司的MC35I ,GPRS无线通信链路的建立包括GPRS的附着和PDP上下文的激活两个过程。具体过程描述如下:(1) 车载系统发送AT指令给GPRS无线通信模块要求激活IP协议,指令中包含想要连接的APN接入点名称,QOS等参数。(2)移动终端发送LCP数据帧与网络进行设置和参数协商。参数协商结束后通过PAP协议确认用户身份,并且保存用户ID和密码。(3)移动终端发送IPCP数据帧,请求动态分配IP地址,并SGSN发送激活PDP上下文请求。(4) SGSN请求DNS服务器对APN进行解析,得到APN对应的GGSN的IP地址。SGSN发送PDP上下文请求给被选定的GGSN , GGSN对用户进行认证,通过后为用户分配动态IP地址,然后向SGSN返回PDP上下文建立成功信息。(5) SGSN向移动终端发送激活PDP消息,并通过IPCP配置回应给移动终端动态分配的IP地址。
6 Web系统的设计与架构
该WebGIS系统采用Microsoft Visual Studio. NET 2003+SQL Server 2000+MapX 构建。该系统的数据主要包括空间数据和属性数据两种,空间数据包括如下图层:行政区划、居民地、水系、公路网、政府、企业、宾馆,并将上述图层在Map X数据集配置文件Geoset Manager中配置,保存为rpdh. gst文件;属性数据存储在SQL Server 2000中,包括用户管理表(用户ID、用户名称、密码、公司名称)、车辆信息表(车辆ID、属于用户、车载SIM-ID、车辆备注信息)和接收信息表 (车载SIM-ID ,经度、纬度、速度、方向、时间等)。
WebGIS系统架构主要由两部分组成。包括客户端和服务器端,客户端只需用户安装有IE浏览器即可,其中客户端的ZoomView组件实现视图改变的脚本组成。服务器端主要包括网络服务器和GIS WEB服务器两部分组成,其中网络服务器需要安装微软的Asp.Net,负责与客户端的会话,GIS WEB服务器提供GIS的功能。
网络服务器和GIS WEB服务器两者之间采用.NET Remoting技术实现远程调用,由ActiveXMessenger组件实现网络服务器与GIS WEB服务器之间的消息传递功能,ActiveXIntermediator为远程处理对象,也是基于.NET Remoting技术的核心,其中ActiveXlntermediator运行在GIS WEB服务器上,在网络服务器上运行它的代理对象。GIS WEB服务器在远程调用中起到服务器的作用,提供ActiveX控件的功能;网络服务器在远程调用中起到客户端的作用。其中GIS WEB服务WebGIS的实现采用.Net编程环境新添加的Remoting[5]技术,主要包括ActiveXBroker Group ,ActiveXBroker, ActiveXServer, ActiveX组件。其中ActiveXServer是ActiveX对象的容器,一个ActiveXServer包含一个ActiveX对象,ActiveX实现相应的ActiveX控件的功能,ActiveXBroker是实现服务器服务启动时初始化一定数量的ActiveXServer 对象,使每个ActiveXServer对象在独立的线程内运行,其中每个ActiveXServer对象需要运行在单线程单元中。
#p#副标题#e#7、系统功能及特点
该系统设计完成后,主要具有以下功能:(1)车辆定位功能。(2)轨迹回放功能。(3)报警功能。(4)电子地图的放大、缩小、漫游、查询等功能。
该系统相比于同类产品具有如下优点(1)用户操作方便,用户只需能上Internet网,然后点击自己要查询的车辆,该车辆就以网页的方式传到客户端,并且可以实时掌握自己拥有车辆所在的位置。(2)平台独立性,无论服务器/客户机是何种机器,无论Web 服务器端使用何种GIS软件,由于使用通用的Web浏览器,用户就可以透明的访问Web GIS数据。(3)使用.NET编程技术和通用wintel平台,该技术具有面向对象,易于重用,为系统的实现和升级带来了方便,便于系统扩展及二次开发。
8 结束语
应用WebGIS技术到车辆定位中来满足了客户通过Internet来查询车辆的需求,为在Internet环境下实现车辆导航、调度奠定了基础。该车载嵌入式平台基于通用的wintel体系结构,便于车载系统的功能扩展及升级。具有一定的应用前景。












![]()
2001-2009 Vogel Industry Media版权所有 京ICP备12020067号-15 京公网安备110102001177号


获取更多评论