车道偏离报警(ldw)系统技术简介
汽车安全性受到人们更多的关注,高科技在汽车中的应用层出不穷,()系统就是一例。专家指出,约有50%的汽车事故是偏离正常行驶的车道引起的,究其原因主要是驾驶员心神烦乱、注意力不集中或疲劳驾驶。ldw系统会在车辆高速行驶时提醒驾驶员,汽车正在偏离正常行驶的车道,让驾驶员及时纠正行车路线。这是继安全带、后,在汽车内安装的又一项安全装置。
系统概要
图1是ldw系统的示意图。一个面向前方安装的摄像机监测车辆行驶的道路,作用距离可达50-70尺。通常,一个或多个cmos图像传感器提供道路的多帖图像,这些传感器连接至处理器的多个视频端口。这里视频基信号处理取代了模拟信号链,这种处理方法不仅提高了系统的精度,还可以节省系统的材料费用开销。
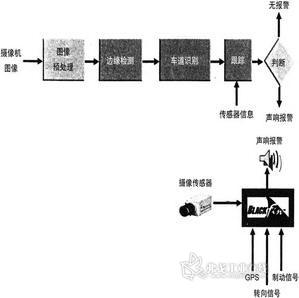
图1 ldw系统与外部连接示意图
数据进入系统后,它被实时地变换成可处理的格式,在处理器内部,首先进行预处理,过滤掉图像捕获期间混入的噪声。然后探测车辆相对于车行道标志线的位置。道路图像的输入信息流被变换为一系列画出道路表面轮廓的线条。在数据字段内寻找边缘就能发现车道标志线。这些边缘事实上形成了车辆向前行驶应保持的边界。处理器则要时刻跟踪这些标志线,以确定行车路线是否正常。一旦发现车辆无意间偏离车行道,处理器作出判断后输出一个信号驱动报警电路,让驾驶员立即纠正行车路线。报警形式可以是蜂鸣器或喇叭,也可以用语言提示,还有用振动坐椅来提醒驾驶员。
ldw系统还要考虑到汽车正常使用的制动装置和转向装置。这些装置会影响ldw的工作,使系统复杂化。因此,在慢速行驶或制动、正常转向时,ldw系统是不工作的。
工作流程
图2更详细地描述了处理器内部的工作流程。总体说,ldw系统要具备两大功能,即发现边缘和跟踪,前者用来确定行车道的标志线;后者让车辆沿着正常的车道行驶。在进行数字处理之前,首先要平滑滤波。由于图像传感器都不是理想的,气象条件、环境温度、车辆运动以及电磁干扰都会在图像采集过程中引入噪声,噪声使图像变得模糊,更确切地说,在原始图像中原本处于同一个灰度值的像素,在噪声图像中却处于不相同的灰度值。
除了噪声,还有量化误差的影响,量化误差会使边缘的边界落在多个像素上,同样使边界变得不那么清晰。噪声和量化误差是无法控制的,因此要对输入视流进行滤波和平滑,不实行这一步,要想发现清晰的道路标志是十分困难的。对数字视频流进行平滑滤波还应考虑到,视频流是按规定速率变化的真实图像序列,图像滤波器的工作速度应足够快,保证能跟上输入图像的连续接收。因此,图像滤波器内核对最少可能处理器周期数优化执行是至关重要的。一个有效的滤波手段是采用基本的两维卷积运算。
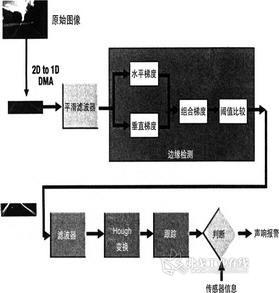
图2 ldw系统内部图像处理算法流程
接下来要进行的是边缘检测。所谓边缘就是指图像局部亮度变化最为显著的部分。对于数字图像,图像灰度值变化可用梯度来表示,sobel算子是常用的边缘检测算法。发现的边缘则可确定车行道的标志。这一过程又要涉及hough变换。它是图像处理中识别几何形状的基本方法之一。最基本的hough变换是从黑白图像中检测直线。它将图像平面上的像素点映射到参考平面(即一个缓冲区)上的点,通过统计特性来确定直线的参数。
hough变换对输入图像中的每个像素点要计算一条正弦状曲线,因而计算工作量很大,需借助技巧来加速计算。首先,某些计算结果是可以提前进行计算的,因此可以通过查找表作为参考值使用。其次,对输入图像中的车行道标志的位置和性质作一些合理的假设,即如果仅对潜在的车行道标志的那些点进行计算,就可以避免大量的、不必要的运算,从而简化计算并提高质量。
hough变换的输出是一组直线,其中某些直线可能就是车道标志线。由于很多高速公路系统的车行道标志线是标准化的,确定的一组规定能从候选的车道标志线中排除掉某些直线,最后,这一组可能的车道标志线用来确定车辆的位置。
车道跟踪
车道信息来自一辆汽车内多种可能的信息源,这些信息源与测得的相关参数(如速度、加速度等)相结合有助于车道跟踪。根据测量结果,车道系统进行智能判断,即是否发生了无意间的车行路线偏离。在更高级系统中,其它参数,诸如时间、路况和驾驶员警觉度也可以模型化。












![]()
2001-2009 Vogel Industry Media版权所有 京ICP备12020067号-15 京公网安备110102001177号


获取更多评论