主动安全系统测试的未来

图1 PreScan工作流程的四个阶段
近几十年来,评价被动安全系统的标准测试规程已经被全球OEM厂商、消费者和政府部门所接受。对于主动安全系统,目前尚没有被一个被广泛认可的测试标准。TNO公司可以提供完整的智能车辆安全(IVS)系统测试程序,能够帮助OEM厂商和供应商进行IVS系统的开发。
高级驾驶员辅助系统(ADAS)在载货汽车和乘用车上的应用正在与日俱增。近年来,ADAS的发展重心也已经从提高驾驶员的舒适性转移到提高乘员的安全性上来。对于ADAS的开发,已不是简单地给车辆增加新的安全系统,而是在原有以舒适性为导向的ADAS上增加新的安全功能。这样,未来的舒适性系统将扩展为防撞系统,比如巡航控制通过扩展自适应巡航控制(ACC)成为预碰撞制动系统。另外,车与车(C2C)、车与道路设施(C2I)之间的通信也将集成到智能车辆安全(IVS)系统。
欧洲在提高车辆被动安全上作出了巨大贡献,大大降低了碰撞死亡人数。目前对于IVS系统的开发目标是要进一步降低这一数字。然而,在未来10年内,还难以看到IVS与C2C、C2I的集成应用。因此在此期间,IVS的开发重心将是碰撞减轻、甚至碰撞避免。IVS的开发必须考虑弱势道路使用者(VRU)的安全,通过通信功能的使用可以增加IVS系统的有效性。
IVS系统的开发需要与相应的测试标准的开发携手并进。没有功能、性能和稳健性的测试标准,IVS系统不可能大规模地应用于汽车产品中。同时,测试标准的开发及后续的应用也需要OEM厂商的高度参与。测试标准应该适用于IVS系统的类型评价:碰撞减轻和碰撞避免系统的开发要求具有短时碰撞(TTC)测试能力的测试方法;而对于保护VRUs的IVS系统开发,则需要开发相应的、合适的测试主体。为保证IVS系统的测试效率,包括舒适性和安全性的测试效率,测试标准要求能够适用于测试各种不同功能。
IVS系统测试
近几十年来,评价被动安全系统的标准测试规程已经被全球OEM厂商、消费者和政府部门所接受。但是,对于主动安全系统,还没有被广泛认可的测试标准。这是因为标准的被动安全测试规程只要求很少的场景,而IVS系统的测试标准需要考虑数百乃至上千种交通场景,在这些不同环境和条件中IVS系统都必须正常工作。因此,这就要求做大量的、低效率的测试。考虑满足所有的环境和条件的IVS系统开发流程,对于OEM厂商来说是很大的挑战。
依靠试验场地评价所有交通场景下IVS系统的性能并不现实。试验场地测试不仅昂贵且耗费时间,而且存在很大的安全隐患,尤其在测试预碰撞系统时。此外,试验场地测试的可重复性低,难以采用同样的测试方法和条件对比不同IVS系统的性能。因此,需要有一些替代的方法来降低测试的次数和复杂性。

图2 VeHIL测试包括一个目标测试车(VUT)和几个机器人小车
PreScan和VeHIL
TNO公司的汽车部门开发了一个仿真测试环境——PreScan和VeHIL,可以用于IVS系统的测试标准化。PreScan是一个软件在环(SIL)的开发环境,VeHIL是它的硬件在环(HIL)实现。
PreScan包括四个阶段(见图1),以实现在桌面电脑中开发和测试IVS系统。第一阶段,利用数据库中的道路、设施及道路使用者等信息建立交通场景。这可以是基于理想的场景参数,也可以基于GPS采集的道路信息数据。在交通场景中同样可以包括天气与光照等条件。第二阶段,建立系统的环境传感器模型(或者利用PreScan数据库中的传感器模型)。第三阶段,利用Matlab/ Simulink界面设计和验证算法,进行包括数据处理、传感器融合和决策制定及控制等。当然,也可以从CarSim或者veDYNA中导入已有的模型。最后,在dSpace ControlDesk和NI LabView设备上运行仿真试验。通常情况下,几个小时可以自动运行上千个交通场景。
系统在PreScan中测试通过后,可将上千个交通场景装载到VeHIL中。通过VeHIL,在真实的硬件环境中完成IVS系统测试。这上千个交通场景可以随机生成,但是为了提高测试的有效性,通常选择包括最重要的或者最具挑战性的交通场景来测试。VeHIL测试用于验证PreScan仿真的结果和IVS系统的性能。
VeHIL可以从技术层面和功能层面评价不同的IVS系统,这是一个半虚拟半真实的现实可控的测试环境。VeHIL测试包括一个目标测试车(VUT)和几个机器人小车,后者模拟其他车辆来给VUT提供环境传感器的输入(见图2)。
经过VeHIL测试确认系统性能良好,接下来将在试验场地中评价它在各种环境条件(不同天气、道路和光照条件等)下的性能。同样,试验场地的测试也可以基于在PreScan中模拟的测试数据。对比VeHIL和试验场地的测试结果,可以验证VeHIL的测试结果。
与试验场地测试相比,仿真和HIL模拟不仅可以提升效率(时间和费用),还可以把试验场地测试的交通场景“翻译”为VeHIL测试场景(见图3)。这不仅可以大大提高效率,而且可以实现对于驾驶员比较危险和难以实现的理想路径中的测试。在试验场地中测试,通常会用GPS系统来定位和测量速度,并通过与GPS系统相连的机器人来控制方向。
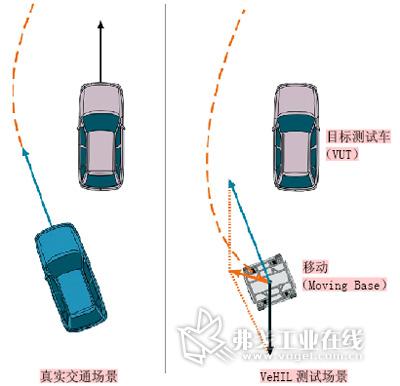
图3 真实交通场景与VeHIL测试场景对应关系
受限于VeHIL试验室的空间和机器人小车的最大速度,并不是所有的试验场地试验的交通场景都可以在VeHIL中实现。VeHIL也并非用来代替试验场地,而是作为试验场地的一个扩充,可以用安全高效的方式重现试验,特别对于试验场地来说既危险又难以重复的试验。VeHIL的一个好处是可以准确地重复行驶路线(对于真实驾驶员来说非常困难)和气候条件(天气、光照)。对于调试控制算法和检测各种IVS系统,这些条件都非常重要。在VeHIL中实现理想的测试路线(理想的速度、侧向偏移和制动等)也比试验场地容易。VeHIL不仅减少试验时间,降低人力物力成本,而且更加安全。
接受度和标准化
虽然大部分驾驶员已经熟知并接受了被动安全系统,但对于主动安全系统,熟悉度和接受度尚需进一步提高。标准测试规程,如EuroNCAP,可以帮助驾驶员理解被动安全系统的益处;然而,主动安全系统还比较难以实现测试规程的标准化。虽然不少主动安全系统可以保证其他交通参与者的安全,但大多数驾驶员都不愿意为这些系统买单。
为了提高IVS系统的使用数量,需要通过法规或者类似于EuroNCAP质检标准来推动OEM厂商来引入IVS系统,驾驶员也可通过类似的质检标准更加熟悉IVS系统的益处。最后,需要政府部门积极推动制定标准和法规。
一些组织也在推动相关标准的制定。如ISO关于智能交通系统的标准化,NHTSA(美国高速公路安全管理局)在制定道路偏离警告系统的测试要求描述。在欧洲,来自EuroNCAP的NCAP+工作组和欧盟项目组(如PReVENT、ASSESS和interactIVe)都在致力于测试规程的标准化。但是,目前尚没有一个标准的测试规程被OEM厂商和公众广泛接受。然而,标准并不总是能够为标准化测试提供足够的信息,因此也不会被人们所接受用于未来IVS系统的测试。












![]()
2001-2009 Vogel Industry Media版权所有 京ICP备12020067号-15 京公网安备110102001177号


获取更多评论